



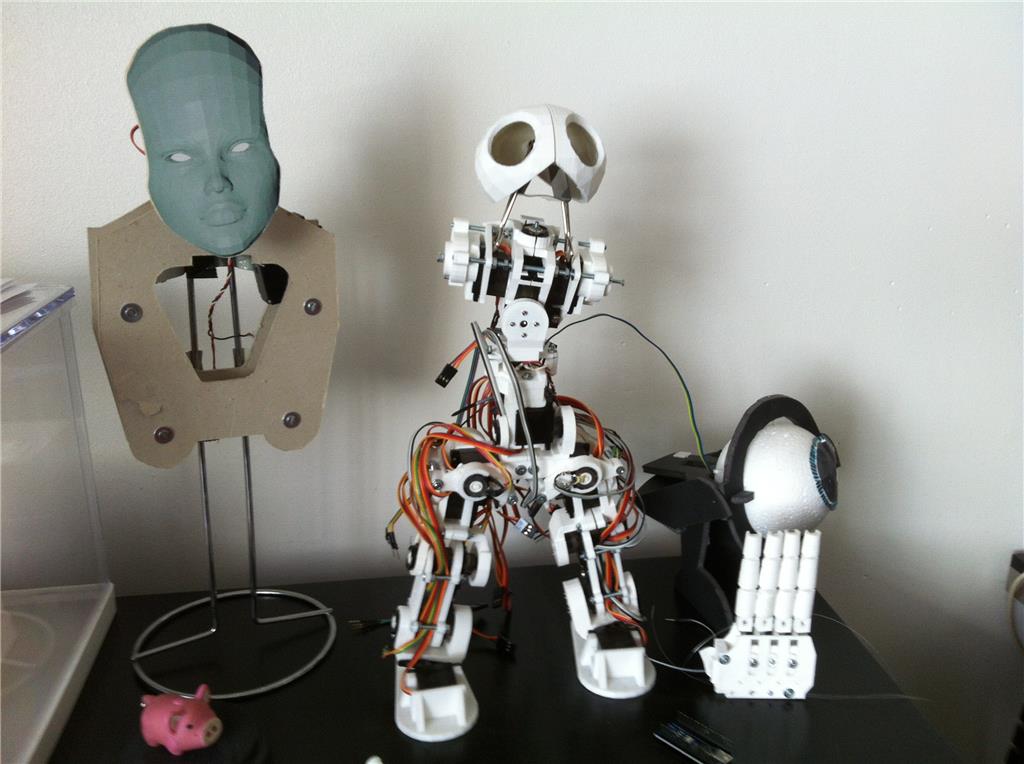
I'm experementing balancing a robot with 2 propellers. For now it's a bit difficult since I can't configure the analog buttons of the xbox 360 joystick.
Here are some pics




By Hexxen
— Last update
Discover more robots
Cardboardhacker's M2d2-The Diy Miniture R2d2 By...
Build an R2-D2 replica from a Lysol wipe container using cardboard, servos and a ping sensor, finished with paper-mâché...

DJ's Robotis XM430 Dynamixel Arm With Open CM9.04
Robotis arm pick-and-place setup with Open CM9.04 controller and firmware upload tips for reliable grasping
Buratino's Basilio
Basilio 45cm 3D-printed walking robot with 26 DOF, external potentiometers for pose capture, seeking EZB/EZ Robot...

This is a really unique design and concept. I really like it!
Hello Hexxen,
Very unique! Looks a bit complicated.
What was your inspiration behind this?
Samantha
The first inspiration was the gyro wheel saw in spiderman cartoon more than 10 years ago.
Then I've changed from gyro balancing to manual balancing using 2 propellers. This wasn't get from anywhere but maybe is from films like avatar:
And finally thinking about how to turn the propellers to front and left in order to turn the robot i took the system from the sony Rolly:
I like the idea of the robot being inside the mechanism that moves it like the rolly - Your creation could develop into something very effective and unique.
I can't wait to see a video!
EDIT: I'm having big problems on converting video. Seems that all small video formats don't like time-lapse videos. And the big one (1.5gb) will crash my browser when uploading. I'll try some encoders these days
Finally I've managed to convert it. I lost much of the video quality but It's ok.