
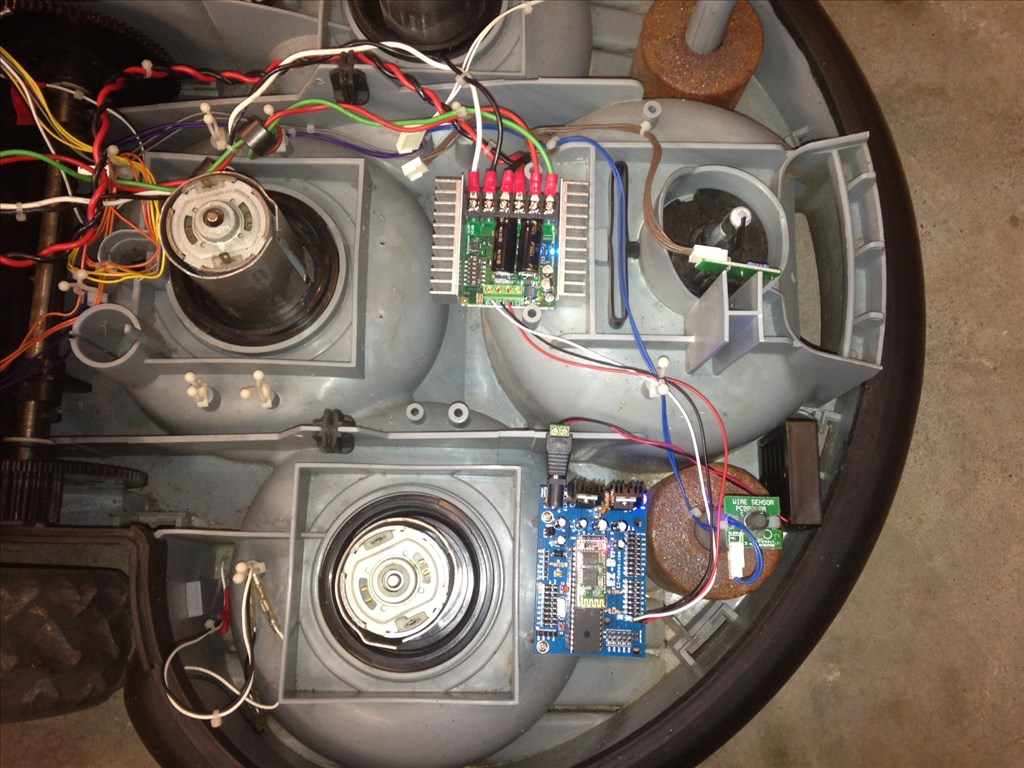
This summer I am hacking my old RL 500 Robomower and turning it into an autonomous robot using the EZ-B. I started the major hack today with the installation of a motor controller for the robot. The motor controller has two PWM inputs for speed of the motors and direction control for both. It does not match exactly the motor control board in the demo on the site, so I will need some community input. Also, I have mounted a Kinect and the EZ-B camera on the robot. Ideally, the ARC s/w could support the Kinect... (come on D.J. Sures!). I have the book making things see and I might run processing and an Arduino in addition to the EZ-Robot to do the Kinect functions, but the data interface would probably be through the EZ-B and the Arduino via I^2 C. Maybe the arduino/processing combo can tell the EZ Robot system some basic info about the surroundings to help in navigation. I am all open to suggestions and input on how to do this. I'd like to add arms too, but they will have to be light because I am using a tri-pod for the body. BTW - I am not using the mower to mow anymore, blades are removed, etc.


Discover more robots
Buratino's Buratino - Humanoid Animatronic

Toymaker's Losing Louie (Drone 3 From The Movie Silent...


Kinect support is another revolution rumor(started by dj). I like robot lawn mowers. Yours is interesting!
@mstephens_42 What motor controller are you using?
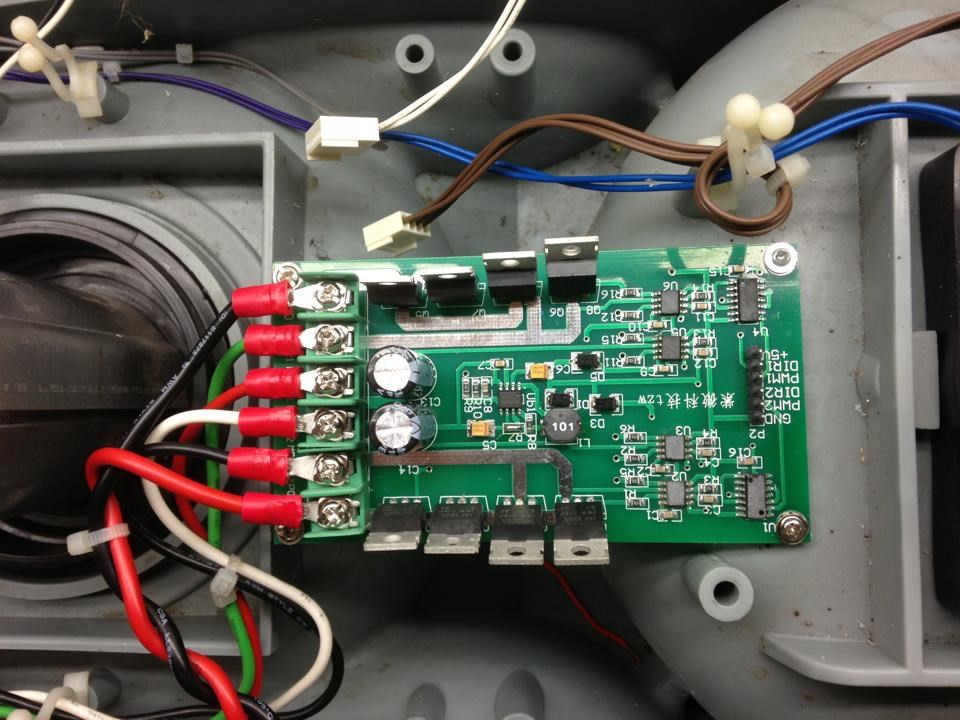
It's something I bought on eBay from Hong Kong. Photo shows I/0 connections. Here is a link to the controller...
Look at this on eBay:
3v-36V Dual 15A H-Bridge DC Motor Driver 30A for Robot / Car Arduino Compatible
https://bit.ly/YSVJ1y
Not bad ! i like the robomower! nice platform! could you further explain " It does not match exactly the motor control board in the demo on the site" please, i think i might be able to help. i think that the EZb is great for live input of information (RemoteControl) of your robot. The arduino would be awesome for some autonomous mapping. possibly having the KiNNEKt on a servo for continous rotation mapping.
Nice! I always wanted a robot mower. Especially since the land here has hills and such that using a push mower sucks. Have you tested that bridge out for a while? I have the same one and I added aluminum heatsink s and heatsink compound to help keep those regulators cool. Does it work well? Get hot?
Still looking on ebay to get mine,have to save this project.
J starne, I just got new batteries for the system this week. I fired up the system and drove the robot around for a few minutes before it stopped working . It turned out the battery fuse blew (30A automotive fuse). I then checked the bridge. The input impedance is 0 ohms across the positive and ground power input connection. It appears the bridge is damaged. Thats what i love about Robotics, you take a few steps forward and then some back... but you got to keep on moving forward! Can you measure the resistance across your power input of the bridge (with at least one of the power leads lifted). This is the red and black wires in my photo. I'd like to know what it should read if I attempt a board level repair.
Awe that blows! ( pun intended) just grab you a 2 x30 sabertooth. Those are reliable units. Zero ohm? Well that would mean no detectable passage of current and there shouldn't be so I'm not sure that's the way to determine its broken just yet. Maybe contact the supplier for a manual? Hey seriously I know what you mean about feeling like you take a step back. I received two broken PSU boards in a row and had to send my motherboard off for repair all within a week lol. It happens. The weather is the weather and sometimes it rains.