
















As promised I've started a separate thread on this. I had mentioned over at my Alan thread that I was thinking about using hoverboard motors for a rolling base for the full bodies of Alan and Alena. These motors are super cheap at about $25 a piece on ebay. They are 3 phase just like the 3 phase hobby motors for cars and planes. So there should be driver support for them.....well yes and kinda no.
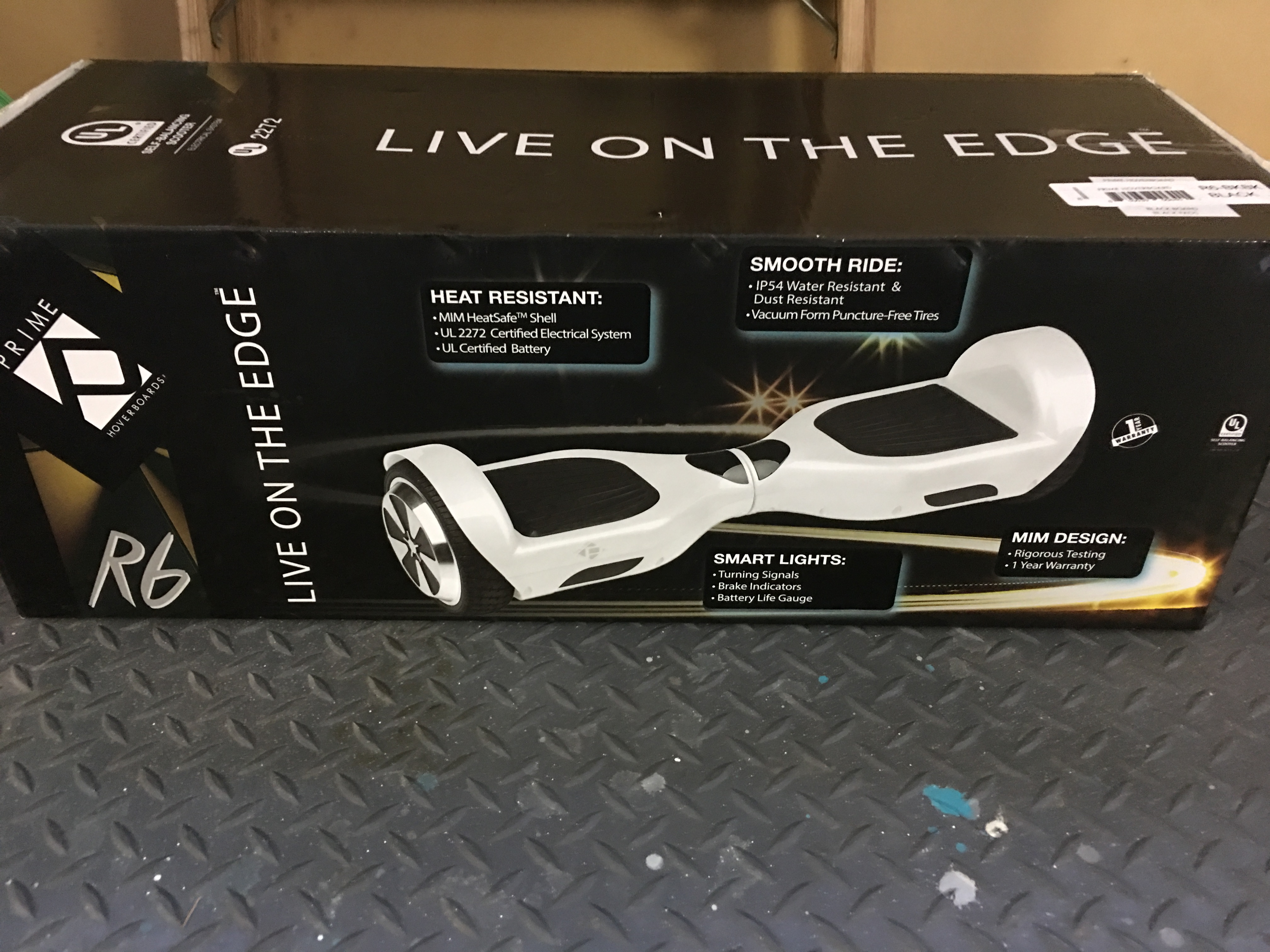
I have been watching a motor controller called the ODrive. Its all open source (hardware and software) and its a dual motor driver. I posted a video of these motors on a grocery cart driving around using hoverboard motors. So I bought an Odrive. I ended up buying a whole hoverboard so I could use the charger, battery and some of the connectors. This one came from Frys and cost $100. Its good upto 265 pounds.
Well now the bad. The ODrive is still a work in progress and not too intuitive. But they have a good write up on how to set them up with the hall effects encoders. All went well until I tried to save out to the board. Over and over again i could not get it to work right. I posted on the forums and got no reply back as to what the issue could be. So after days I began looking for another solution.
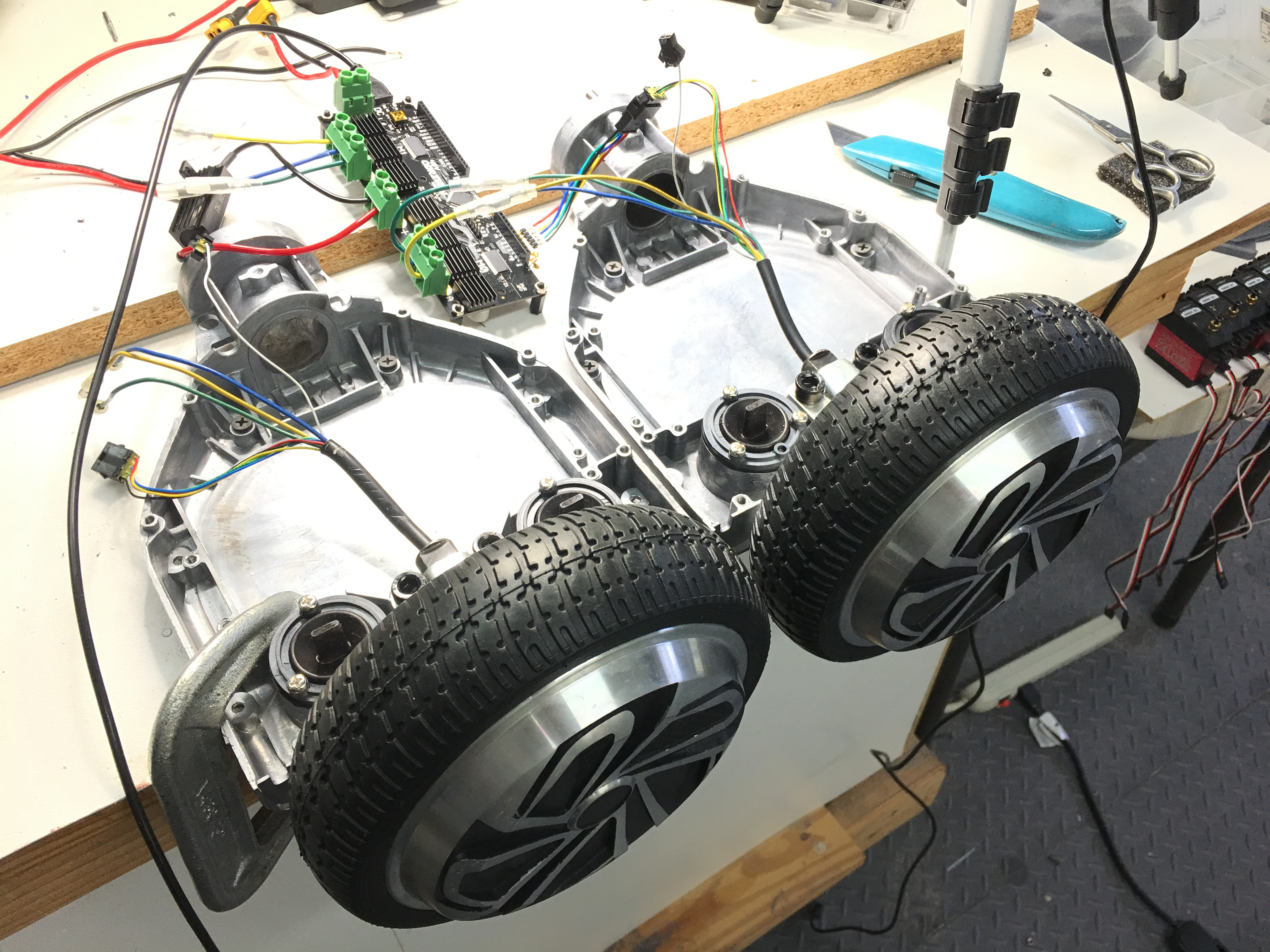
I found a great source in china that is making opensource stuff for skate boards. The got 2 single motor drivers. Each one has a standard servo connector and i can use two of them for mixed mode (tank mode). Each board costs $85. So its a bit more than the ODrive ($150 with shipping for the 48 volt ver.)
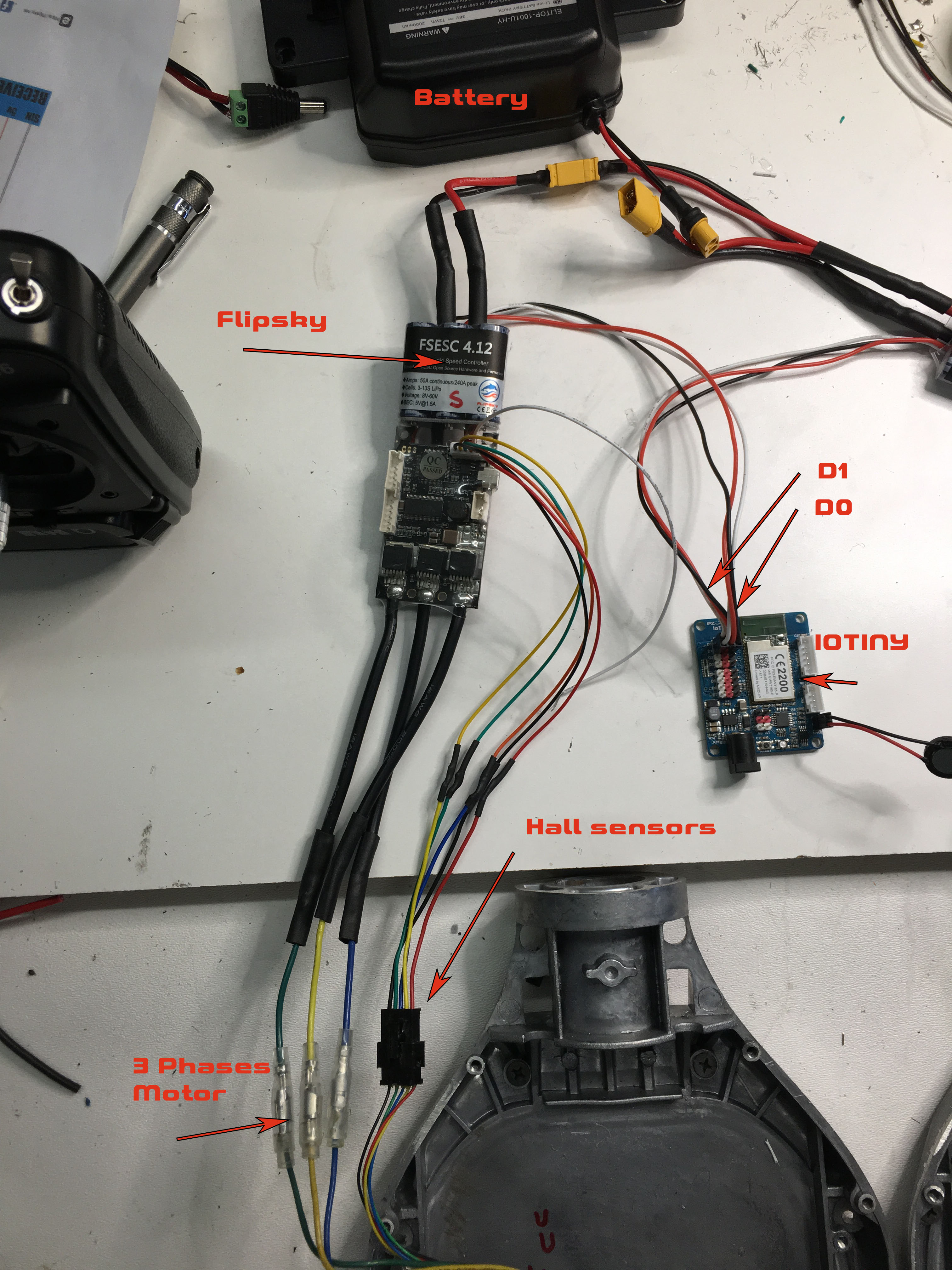
The name of the board is the FSESC 4.12 50A Based on VESC 4.12 from Flipsky ESC. And can be found here: Flipsky ESC
This controller can be completely programmed with their really great software..automatically figures out all the poles for the phases. Set up the frequency for the pwm and even have shut offs for voltage mins etc. They have a good youtube channel with vids on how to set up everything.
I have the video of the break down of the hoverboard done. As soon as I get these control boards I will be doing tests with the ezb to control them. Then I'll put together a final video and post here.
Discover more robots

DJ's And Now For Something Completely Different (Pdp-8)

Cardboardhacker's Raiko Personal Robot

The Open source software i will be using to control and program these controllers is called : VESC-Project.com
I've downloaded the software and Its very very thorough and covers so many options. There is a set up wizard which i will use to program them with and then I will dig deeper to adjust settings manually.
I've already found a fix for my problem about controlling both motors and keeping them straight. There are two wires that connect both controllers called CAN. One becomes the master at ID 0 and the other becomes the slave at ID 1. You program both but the master delivers the signal so they stay in sync when travelling straight. The hall effects encoders will assure that...now bolting them straight to the board may be more of a challenge
Good news. I thought there should be a way to do it. I would think you can also put in an offset. ( just in case you are a bit off in the alignment.) If not shims work well. LOL
I just clicked submit and have a hoverboard on the way to Connecticut. I paid a bit more but it's on its way.
Awesome! I'm hoping to have the control boards from China any day. Most people say they got them with in a week.
I have to read up on the controllers. They sound like a perfect fit for this project. I will be ordering them maybe tomorrow.
Did you plan on a 4 wheel platform? More stable than 3. My goal was to mount my 2 batteries on the base. One will now be the one included with the hover board. Still, I need weight to offset the head, torso and arms.
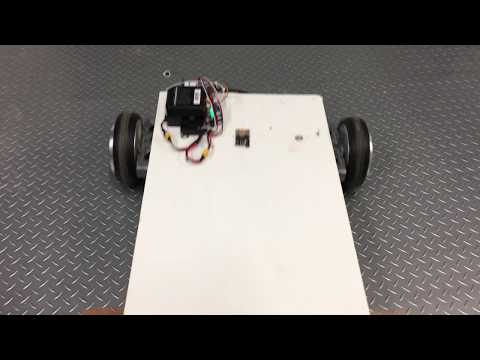
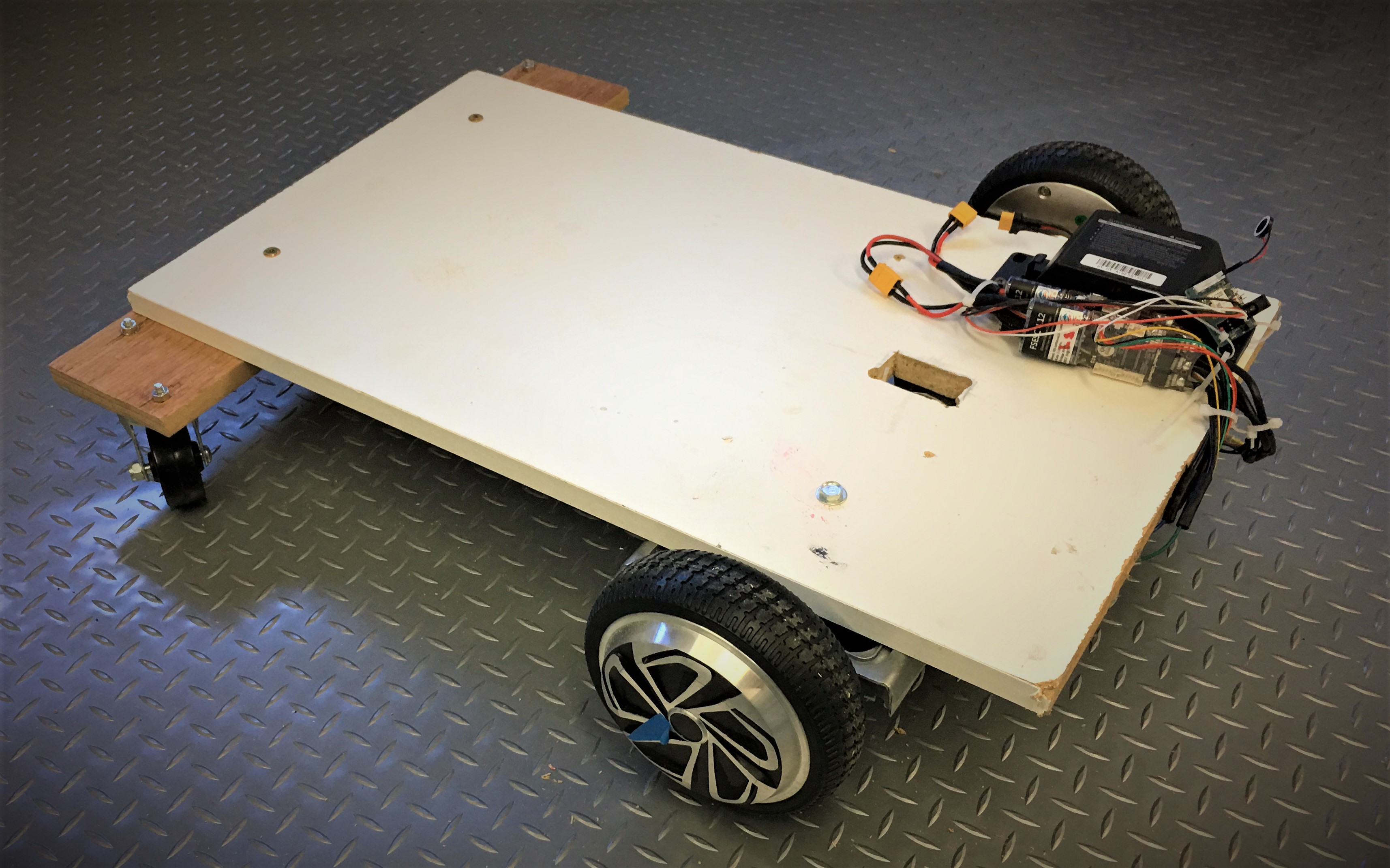
Yeah for this test I am going to just bolt them to plywood and add two 360 castors on the back.
Yeah you definitely going to need some counter balance. In the end I will be using some sealed larger batteries for Alan and I hope their weight in the base will help offset the motion at the top! You can spread the wheel base out but still gotta get it through the doors!
A car battery should work. Sealed lead acid? I am planning on bolting the wheels to aluminum angle then bolting the angle to a steel base plate ( more weight,)( final design) . The aluminum angle will allow me to adjust the tracking alignment. ( No shims LOL). I haven't decided on casters or omni casters? The design needs to develop. Prototype will be what ever I can find. A robot about 5 ft tall is my goal, maybe.
Yeah I was going to go with SLA marine batteries.
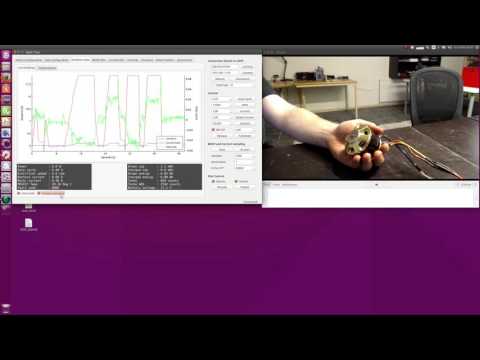
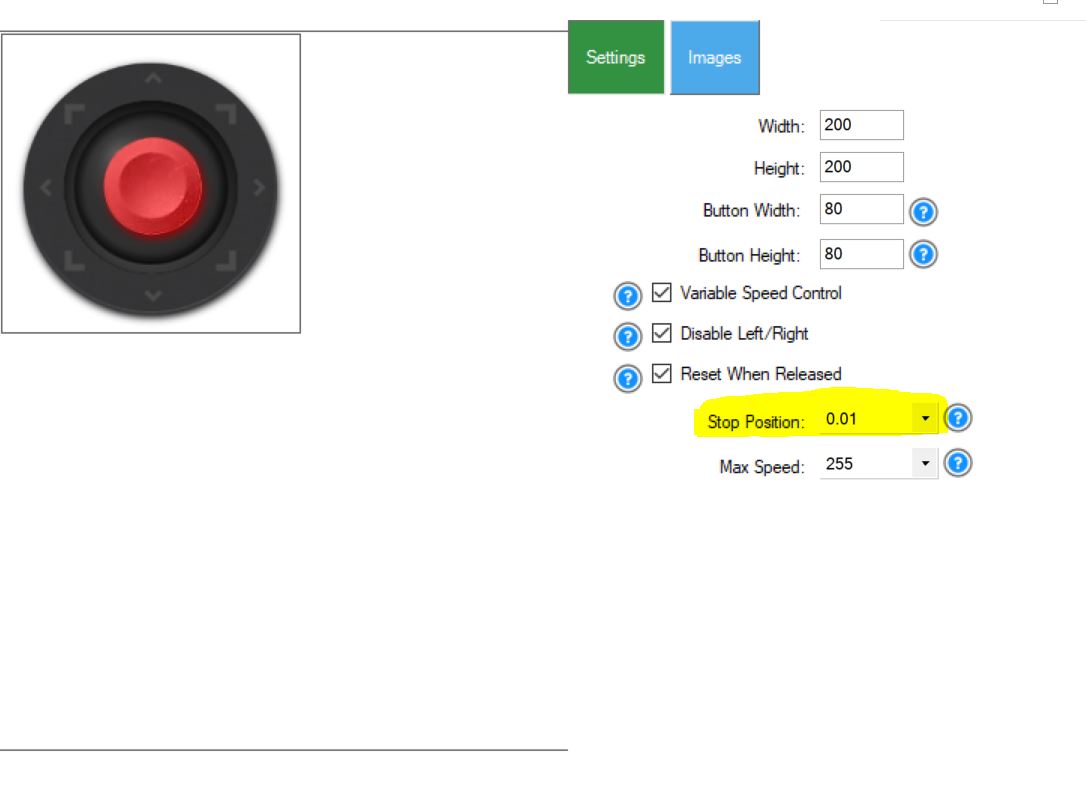
Here is the screen from the VESC program. This screen is the set up for PPM...you can see the mapping over Can Bus for two different controllers acting as one... also includes traction control and difference...ie as in one wheel slipping under load or on slick surface then working to get going at the same speed to go straight. Powerful hardware and software.
Very impressive! I will have to get my work work done and really look at this. Real time data will be very helpful if we end up with heavy bases. Ramping too. Deceleration will also be needed. Wow, and i am just looking at this screen shot!