





I have gotten half way through my wall-e and the comments stopped so im reposting it.
I just got my needed servo extensions from china after 1.5 months.(why i stopped posting: Waiting eyeroll)
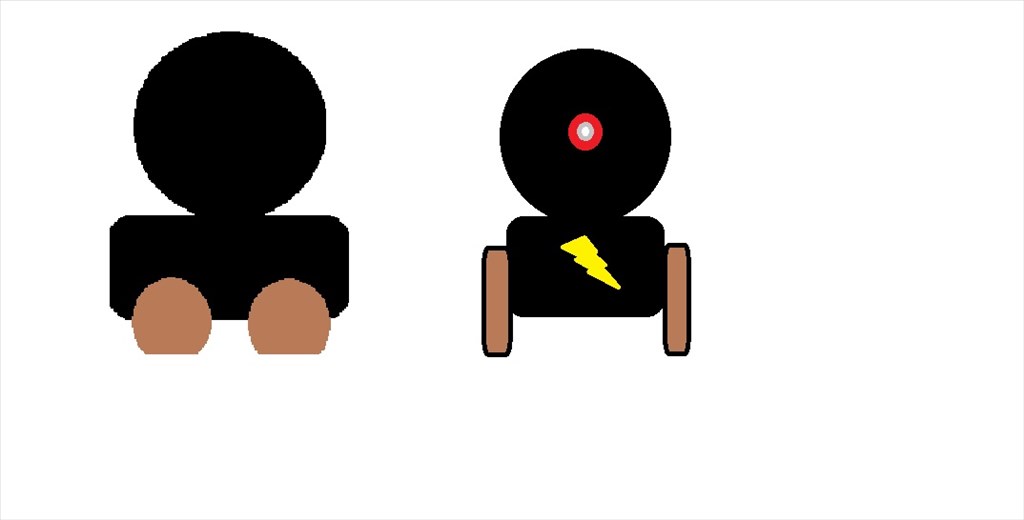
so this is where im at:

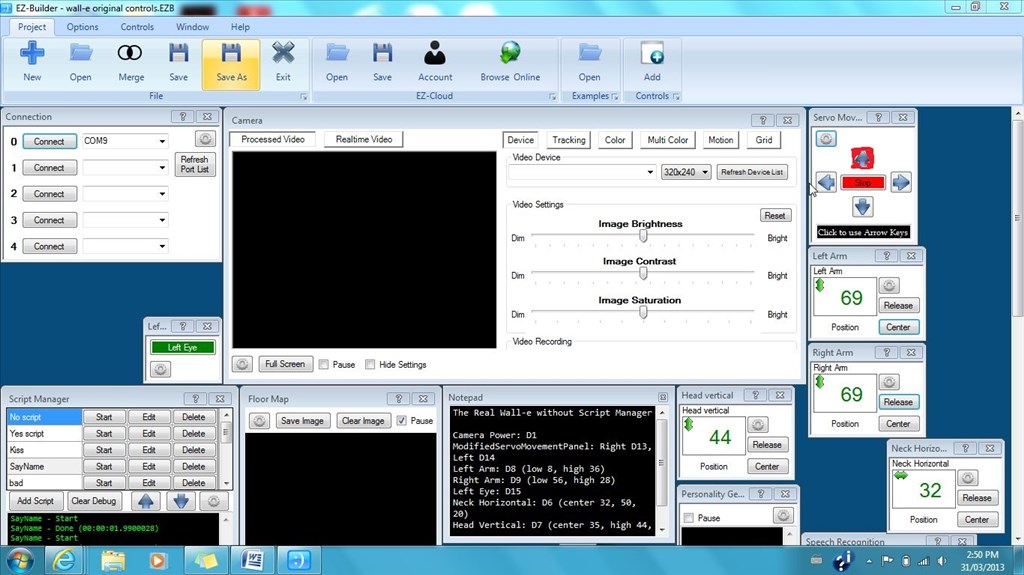
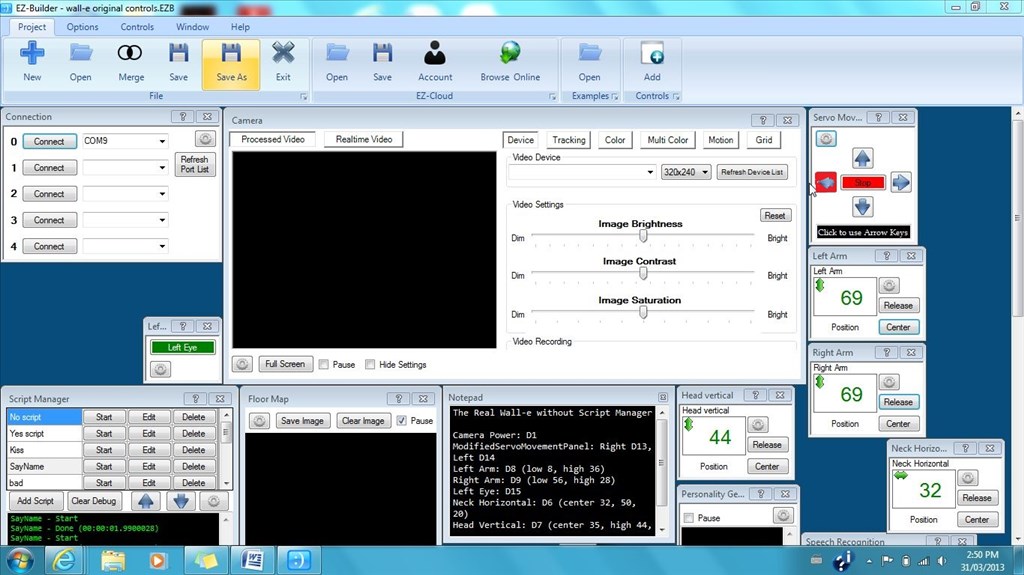
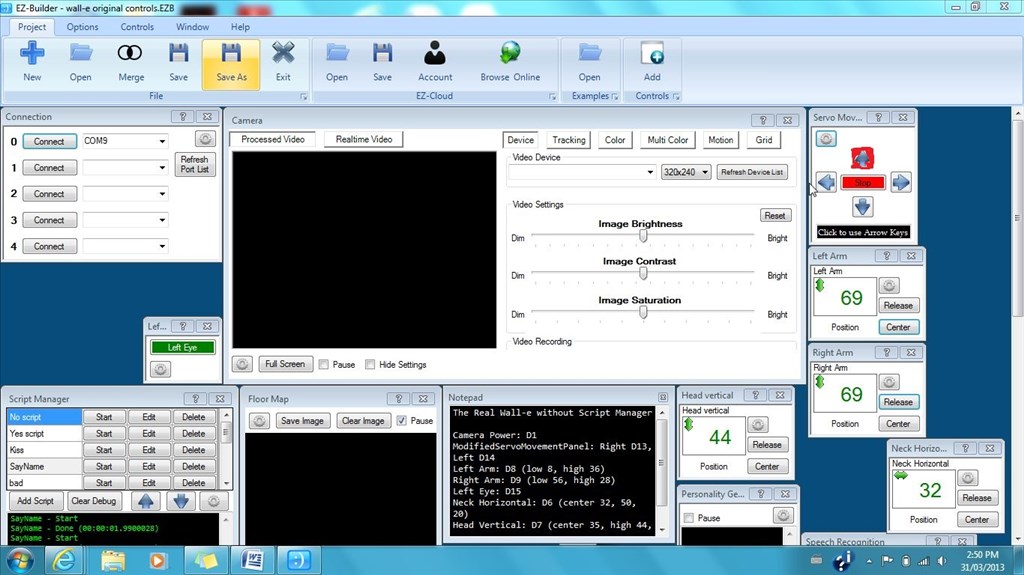
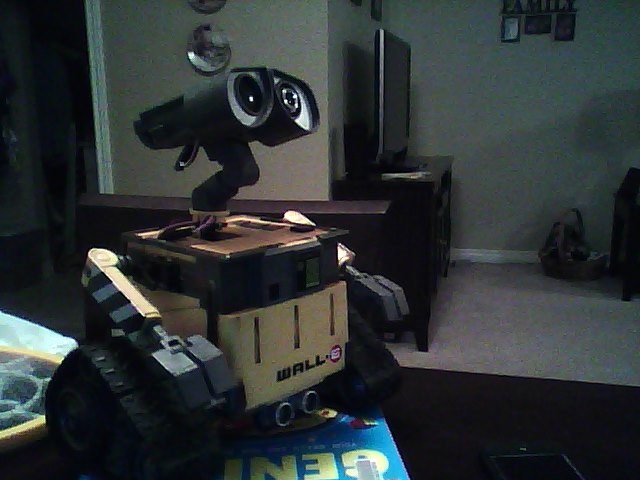
Arms and tracks are done, but untested. head horizontal servo is ready but the camera has to be hacked and led has to be modded and connected to the ez-b. also have to put servo in the head.
any ideas for head tilt mounting will be appreciated.
By CardboardHacker
— Last update
Discover more robots

Irobot58's Project F.R.E.D( Friendly Robotic Entertainment...
Steampunk robot head FRED uses EZ-B and DJ Sures scripting with voice recognition, camera tracking and 36-thread zodiac...

Rb550f's Meet Moshi
MOSHI mobile robot ex-Hero JR with Omnibot drive, VEX controller, voice commands, AM/FM & Bluetooth, servo head,...
Gary's RALPH
Multi-lingual InMoov (Drupp neck) using adaptive AIML to switch languages and voices, plus facial recognition for...

I had a similar wait for servo extensions from China which meant I couldn't do anything on my build but wait for the first month or so... Now I have around 500 servo extensions due to impatience and ordering more from a different place, and more from another different place... At least now I know I wont run out any time soon.
He is getting there, although the head can be the hardest part, fitting in the camera and all that. But you seem to have made good progress on the base, looks pretty much stock which I love on there robots, it was my main goal on my Hearoid until I changed the head totally.
Keep it up Before long you will have a whole army of robots at your command.
Before long you will have a whole army of robots at your command.
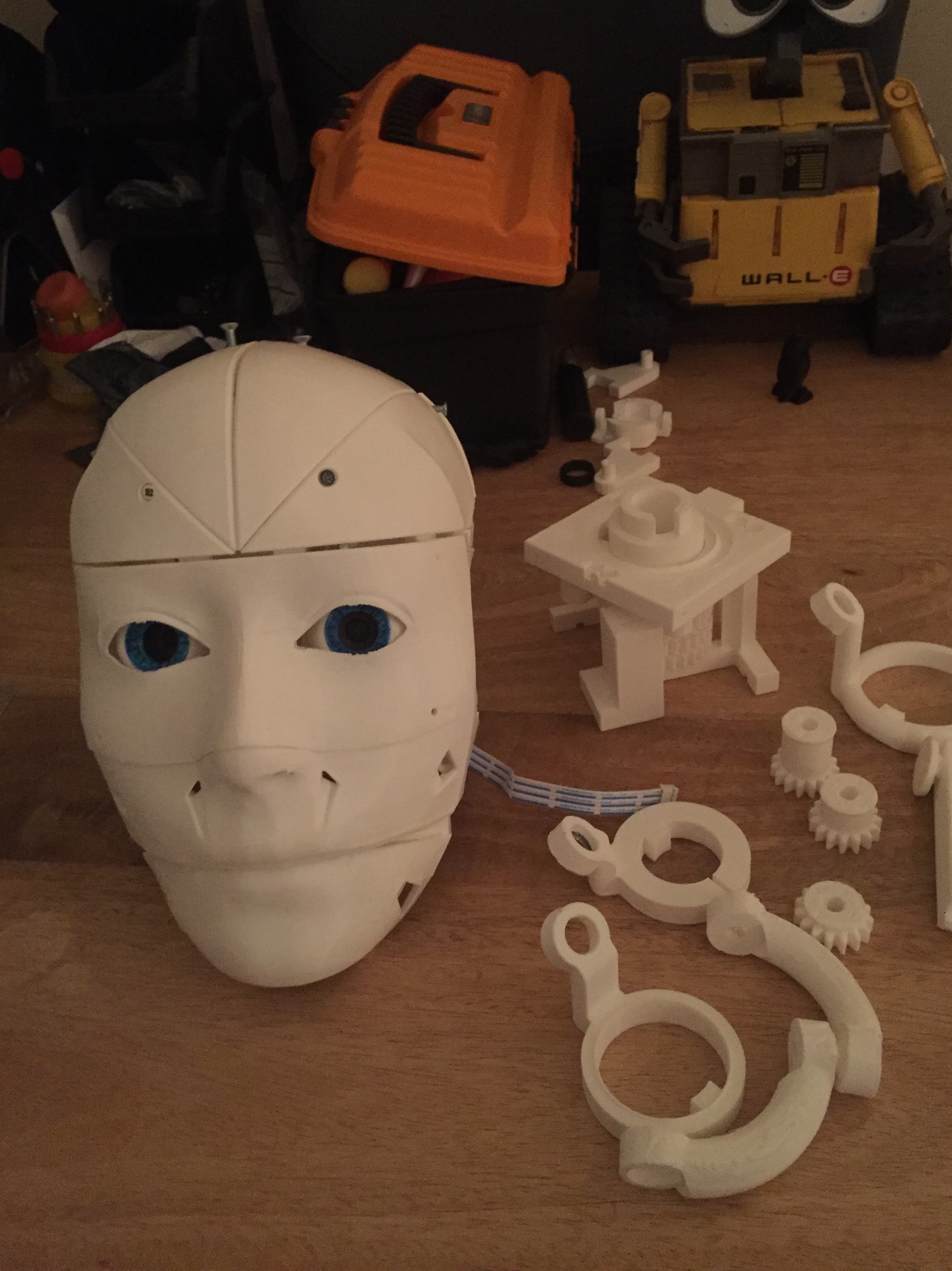
my next project:
I roll?/crimp my own servo leads. Ya it's a little more work than buying pre-made but everything is custom!
Check out this link. Everything you would need.
www.hansenhobbies.com/products/
thanks.
just noticed the camera is different from his hacking video.
have any of you hacked the latest ez-camera?
Both cameras I've had have been the same black camera (only difference is the one in DJ's video is blue).
They are the same inside.
You can do it with the USB as DJ shows or can connect direct to where the battery is (and remove the battery) plus the signal to the spot shown in the camera hacking topic. Like I said, I have done 2 of them now without a problem (although turning on and off in ARC takes some fiddling with script and timings).
but the light is in a different spot. still solder to the pin behind the light?
do you have a picture?
i need to know where to solder that signal cable.
ok so i have moded the camera and soldering the ultra distance sensor.
mainly working on my rc car project. done everything i can do on it so im back to my wall-e.
any ideas for the head tilt mount?