





I have gotten half way through my wall-e and the comments stopped so im reposting it.
I just got my needed servo extensions from china after 1.5 months.(why i stopped posting: Waiting eyeroll)
so this is where im at:

Arms and tracks are done, but untested. head horizontal servo is ready but the camera has to be hacked and led has to be modded and connected to the ez-b. also have to put servo in the head.
any ideas for head tilt mounting will be appreciated.
By CardboardHacker
— Last update
Discover more robots

Ezang's Motion Detector
Control AM312 mini PIR motion sensor with ARC serial monitor and Arduino - DC2.7-12V, 3-5m range, 100 angle, low...

Daman's Yet Another Wall-E
Compact Wall-E build with EZ-Robot: webcam eye, continuous servos, EZ-B mounting, servo speed control and tips for...
Pirumpi's Pringles Robot
EZ-B enables quick creation of a Pringle Robot during launch time, showcasing fast, easy robot building.

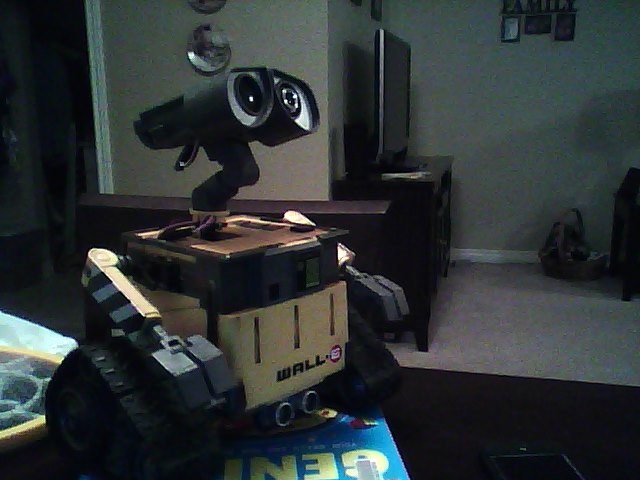
Wall-e is almost done! His arms have been remounted and the tracks are almost ready to be fitted. Due to me misaligning the servo I tried to plastic weld the mounting piece and that broke off. So, shave the plastic mould off and screw it into a block of wood. The camera is wired up and in place(untested) and the led is connected to a servo extension so I can plug it in. Once the tracks are done I just need to test him and then add the head tilt servo(looking for suggestions for mounting) and ill he'll be finished!
Photos and vids to come soon!
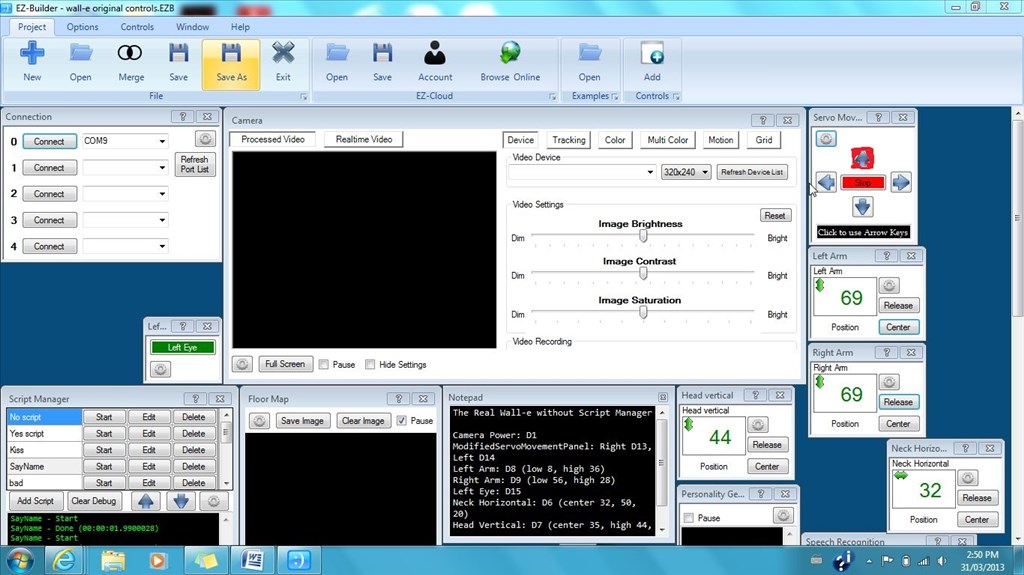
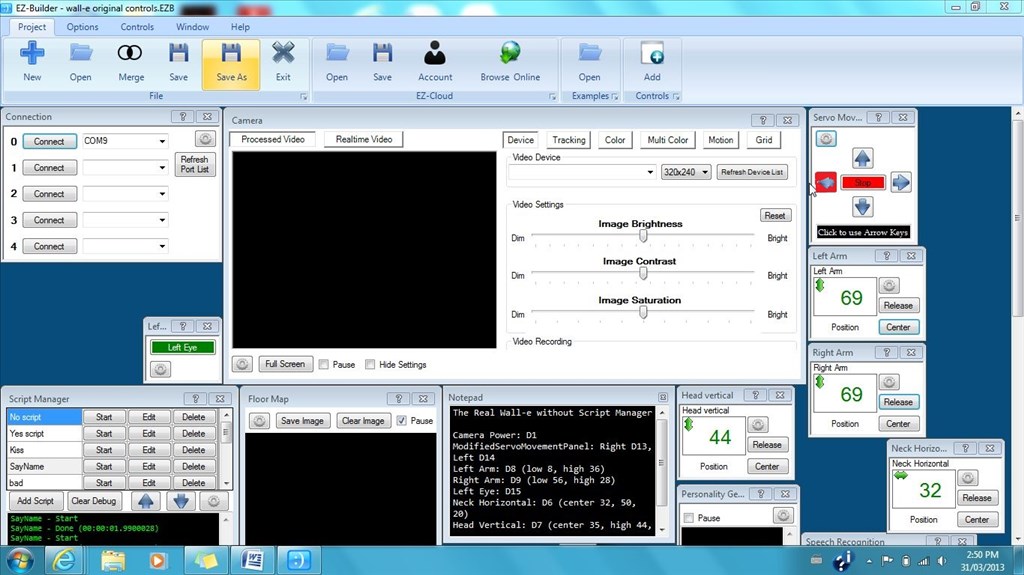
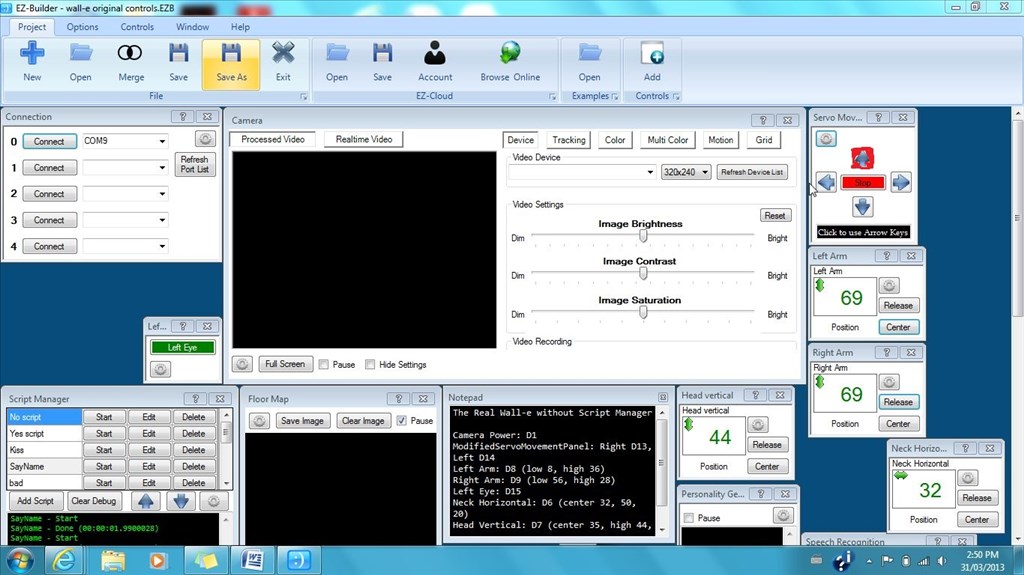
Ok so I have started remaking his project file. I also tested my wiring for my camera and it works. I set the min and max for the head turning servo. His left track is almost fixed and today I will work on the right track. Once that's done all that's left is the head tilt.
Once again any ideas on the head tilt servo mount? I'm looking to try to hide the servo as well as possible.
Technopro's wall-e video!
He has been tested and can drive around now. radar works alright, but in testing he would turn partially and would hit the wall with his left track. Will post video of him flying(more so crawling) around. Some pics: