Here is my D-O droid powered by the IoTiny and controlled through my tablet.
The head is too heavy for the servo in the body, it wants to tilt forward so the nose hits the ground. so I had to lock it up. Otherwise it has the function for the bar holding up the head to tilt back and forth.
By kashyyyk
— Last update
Discover more robots

Jstarne1's Iotiny Recon 6.0 Rovers , Educational Robots
Convert used robots into IOTINY+camera donor units for durable, kid-safe hands-on robotics demos and classroom...

Bhouston's New Eye Mechanism For Inmoov
I can’t access external sites. Please paste the webpage text or key content here and I’ll create the 150-character meta...

Rb550f's Meet Moshi
MOSHI mobile robot ex-Hero JR with Omnibot drive, VEX controller, voice commands, AM/FM & Bluetooth, servo head,...

Wow! That's a 3D printing masterpiece!
That is so flip'n cool!
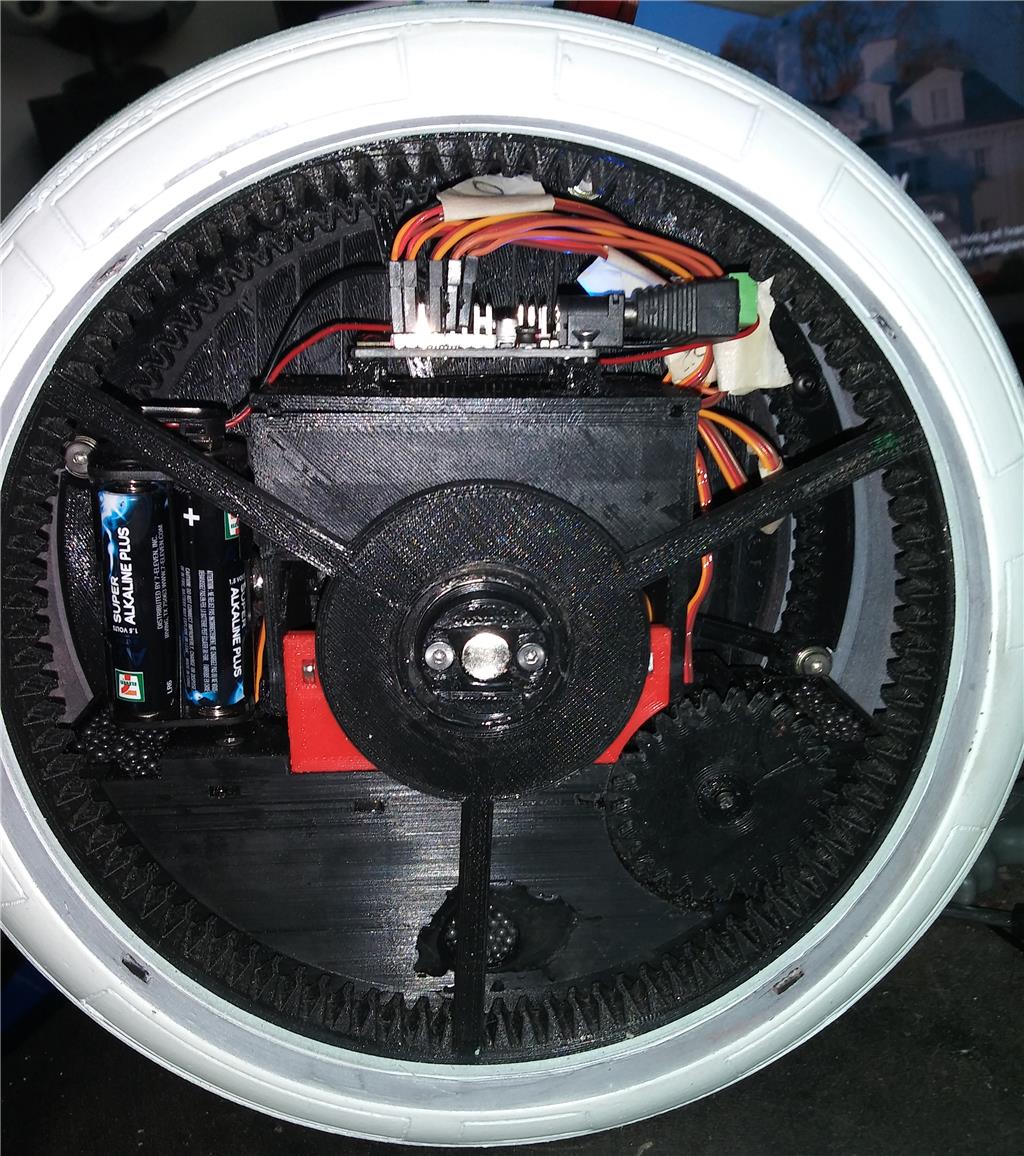
WoW is Right. What are you using for the counter weight. I think it looks like shot. Maybe you just need more counterweight to compensate for the Head weight. if you do not have enough room try making a solid lead weight. Have you thought of a GYRO. for balance. Thanks for showing the insides.
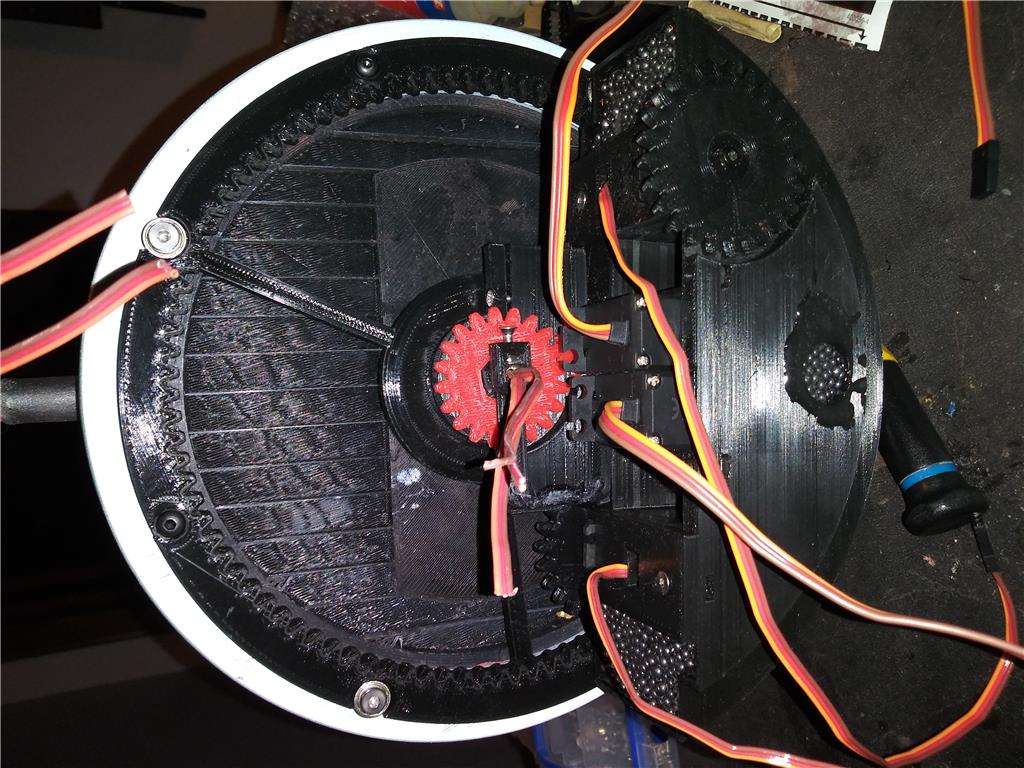
It has about 4 pounds of shot. The head rod is connected to a servo to tilt it back and forth, the red gear in the first image, the counter weight doesn't affect the head, only keeps the whole assemble from spinning.