
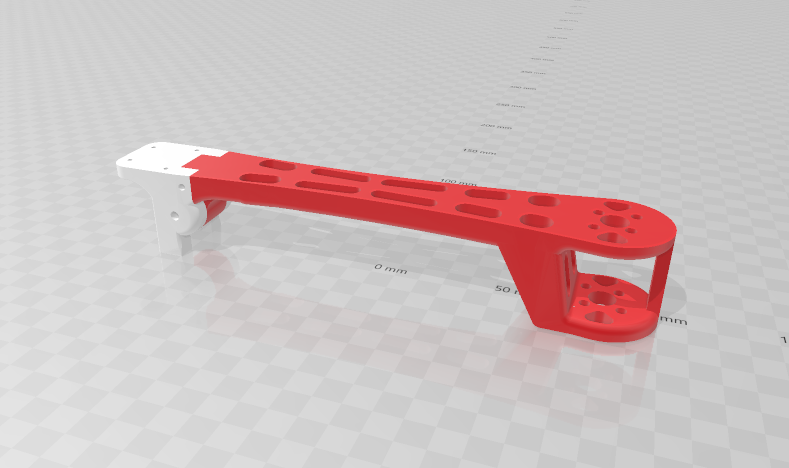
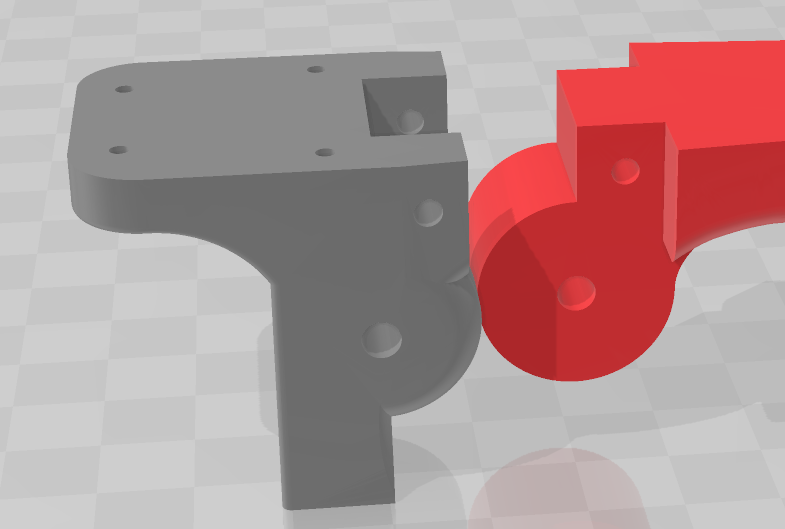
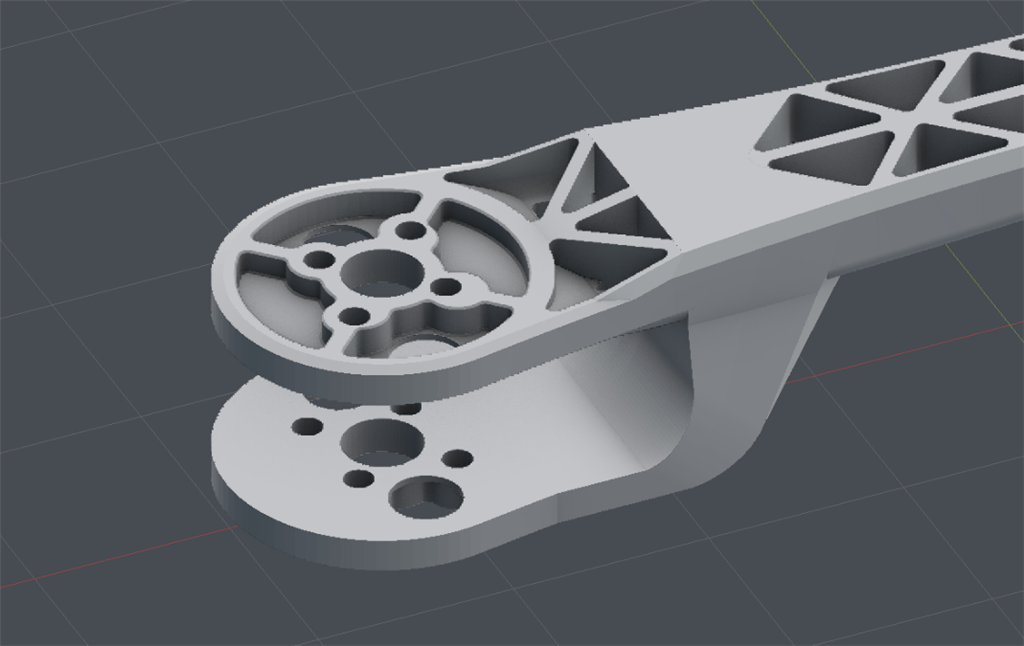


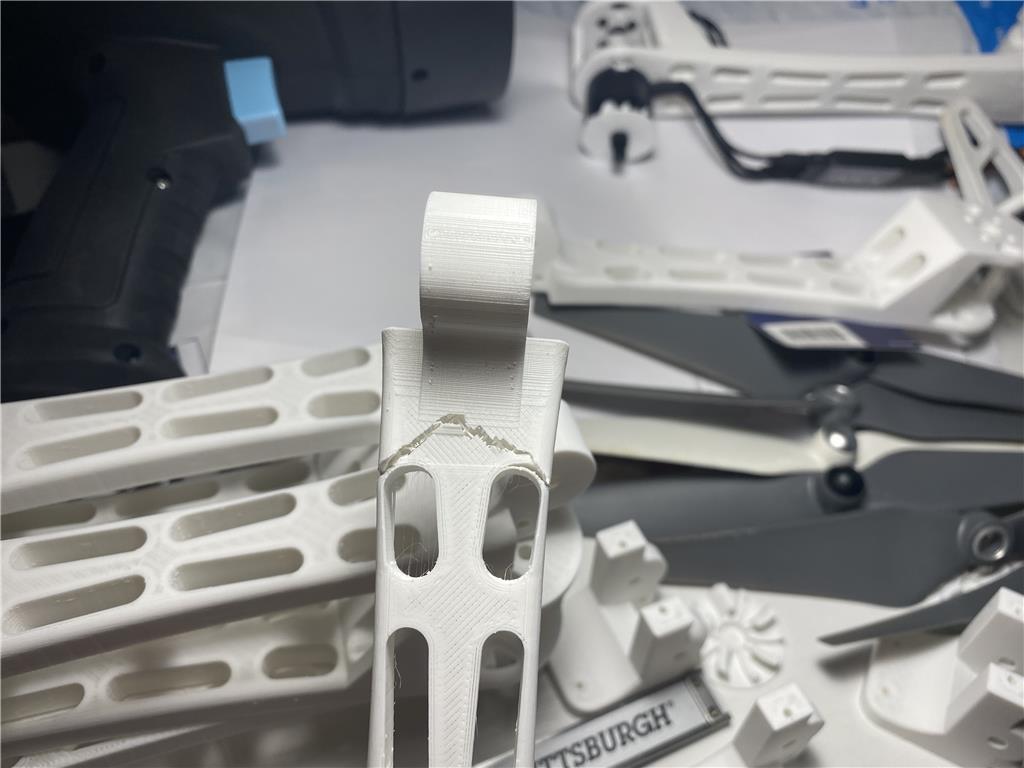
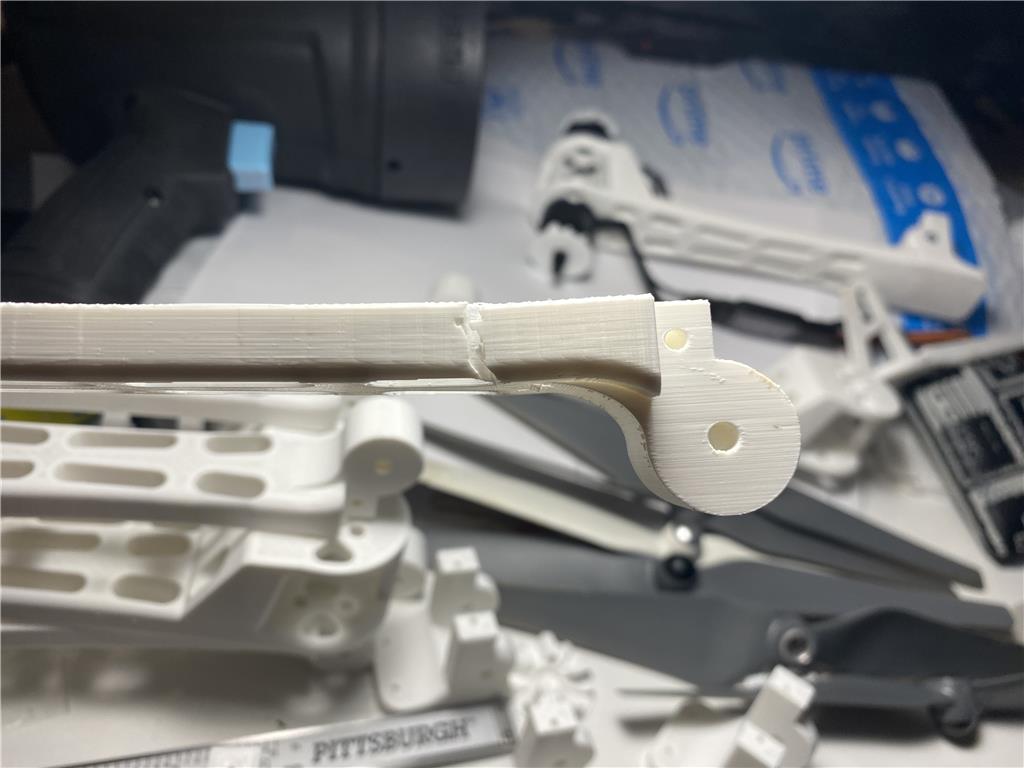


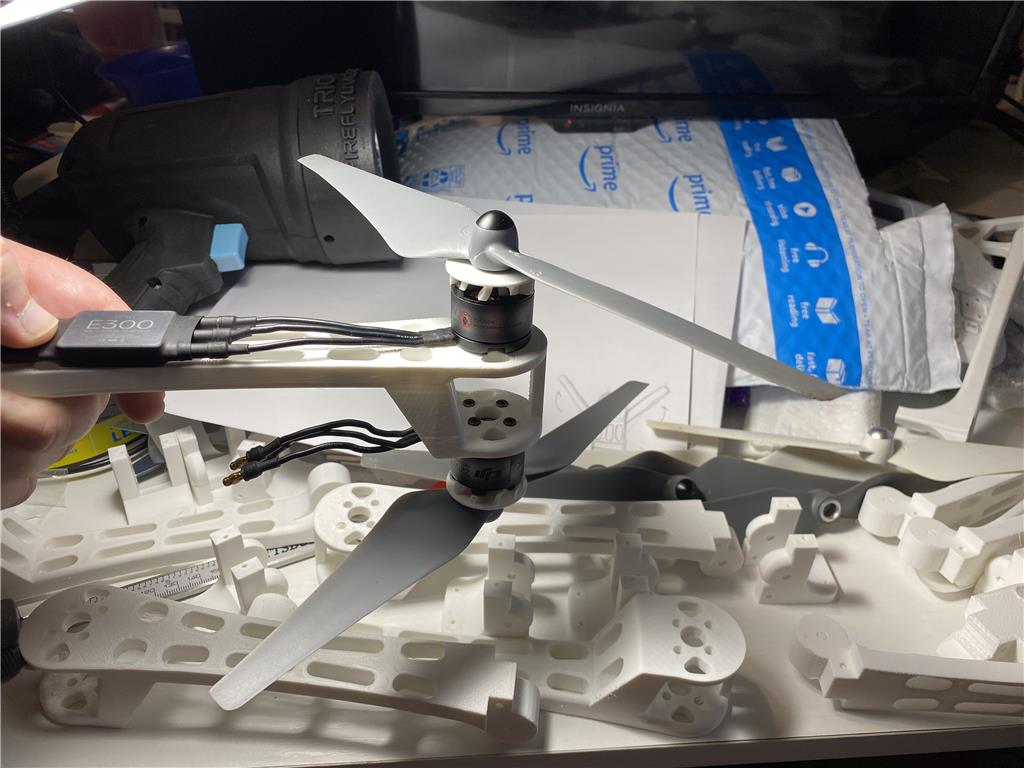
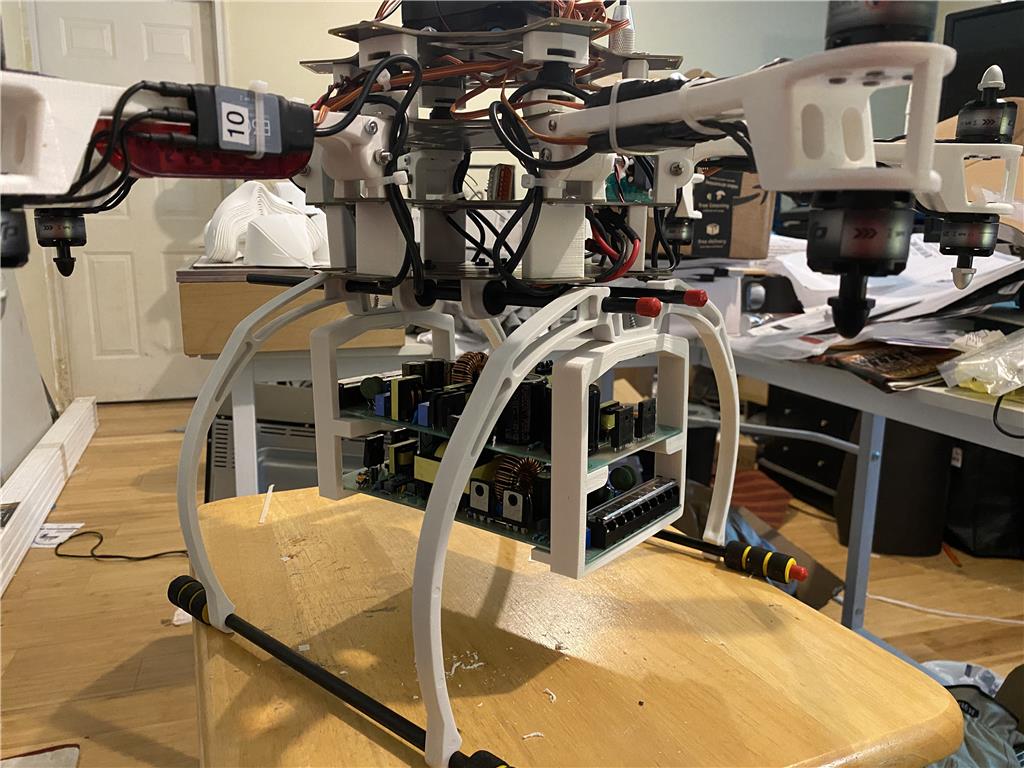

Hello all, I have been working on this project a couple months sense inception. The frame with the current plan is a Hex frame arrangement with two motors on each arm. That is 6 props facing up and 6 facing down. Total thrust should be around 15 pounds. The arms and joints are all custom 3D printed. The original purpose is to get a WiFi connection to robots outside direct line of sight to monitor them, download video etc. It is no secret getting a antenna in the air and pointed at a target greatly improves range and speeds. One of the goals is to use a camera in line with the wifi antenna and track a light beacon to keep antenna direction. I suppose a compass could help as well. Eventually the goal is to have gigabit speeds launched as multiple robots within a few miles of my home. To begin with however one will be enough. I will start with equipment to get the project going and then upgrade as needed. One large opportunity area of improvement in the current setup is how large the 1000 watt power supply is. At this time it weights around 3 pounds and I would like to get that down to. 1 - 1.5 pounds with higher end electronics. The new electronics cost around 400 dollars , so these 12v x 40 amp power supplies will have to do for the moment.

Discover more robots

Edison2's R2d2 Star Wars - Kinect!

Canadian's Giant Robot Project With Ez-Robot Board

Congrats, great project!!! Looking forward to see more, and yes...a video would be great!!
Oh cool. look forward to see how this turns out. Nice.
So I have power wire and almost all the distribution done. I do still need to hookup the navigation lights some how. They are RED and GREEN just like on a full size aircraft. I still need the power from power supplies in the lower cargo area to be wired, but otherwise I am ready to setup to fly. My next hurdle is that 12 rotors is not a common configuration, standard flight controllers go up to 8 is a Hexa X on the Pixhawk. I have all Radiolink equipment as a flight management unit. After I get the flight management working and basic stability nailed and tuned, I can move to having a onboard computer like a Latte Panda or Raspberry pi for example. I think I am going to be too far away to try and keep connected to a EZB. First I need it stable before I add a mission controller onboard.