




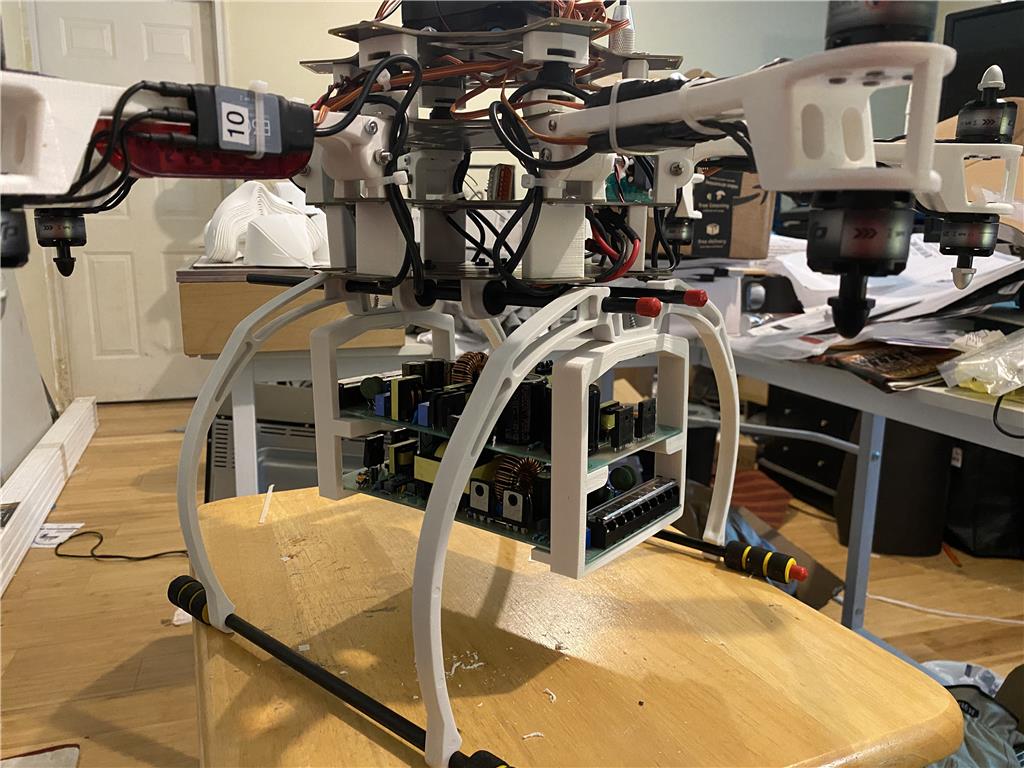

Hello all, I have been working on this project a couple months sense inception. The frame with the current plan is a Hex frame arrangement with two motors on each arm. That is 6 props facing up and 6 facing down. Total thrust should be around 15 pounds. The arms and joints are all custom 3D printed. The original purpose is to get a WiFi connection to robots outside direct line of sight to monitor them, download video etc. It is no secret getting a antenna in the air and pointed at a target greatly improves range and speeds. One of the goals is to use a camera in line with the wifi antenna and track a light beacon to keep antenna direction. I suppose a compass could help as well. Eventually the goal is to have gigabit speeds launched as multiple robots within a few miles of my home. To begin with however one will be enough. I will start with equipment to get the project going and then upgrade as needed. One large opportunity area of improvement in the current setup is how large the 1000 watt power supply is. At this time it weights around 3 pounds and I would like to get that down to. 1 - 1.5 pounds with higher end electronics. The new electronics cost around 400 dollars , so these 12v x 40 amp power supplies will have to do for the moment.

Discover more robots

Leversofpower's Cutting My Teeth. The Floor Crawler

Knusel's Johnny 5 Hannover


send a video please
EzAng
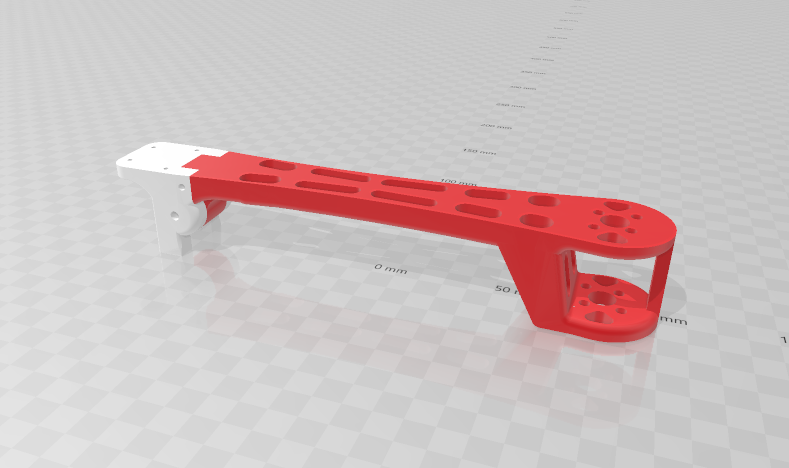
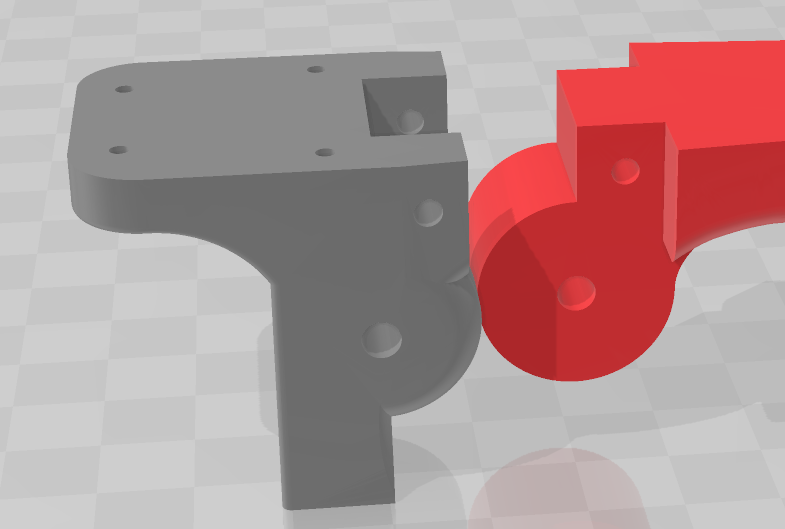
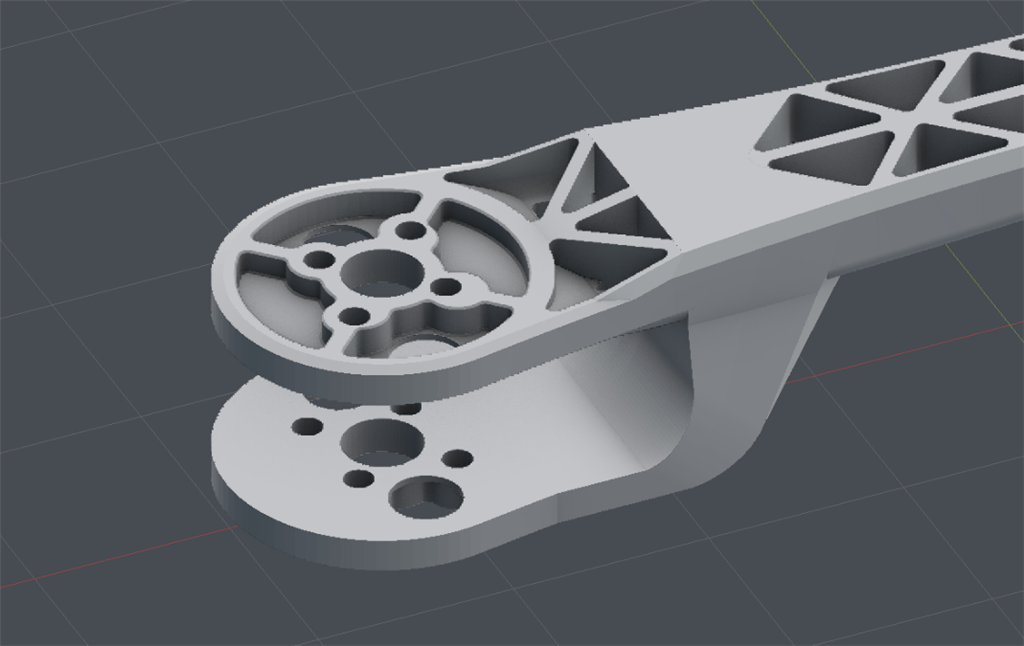
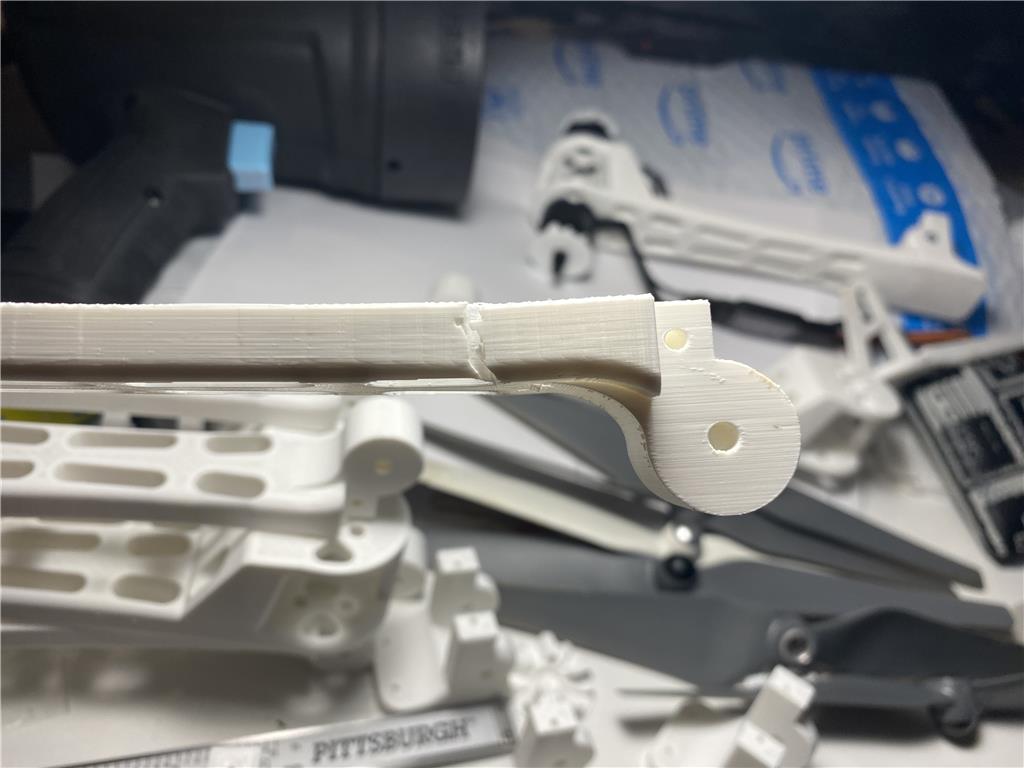
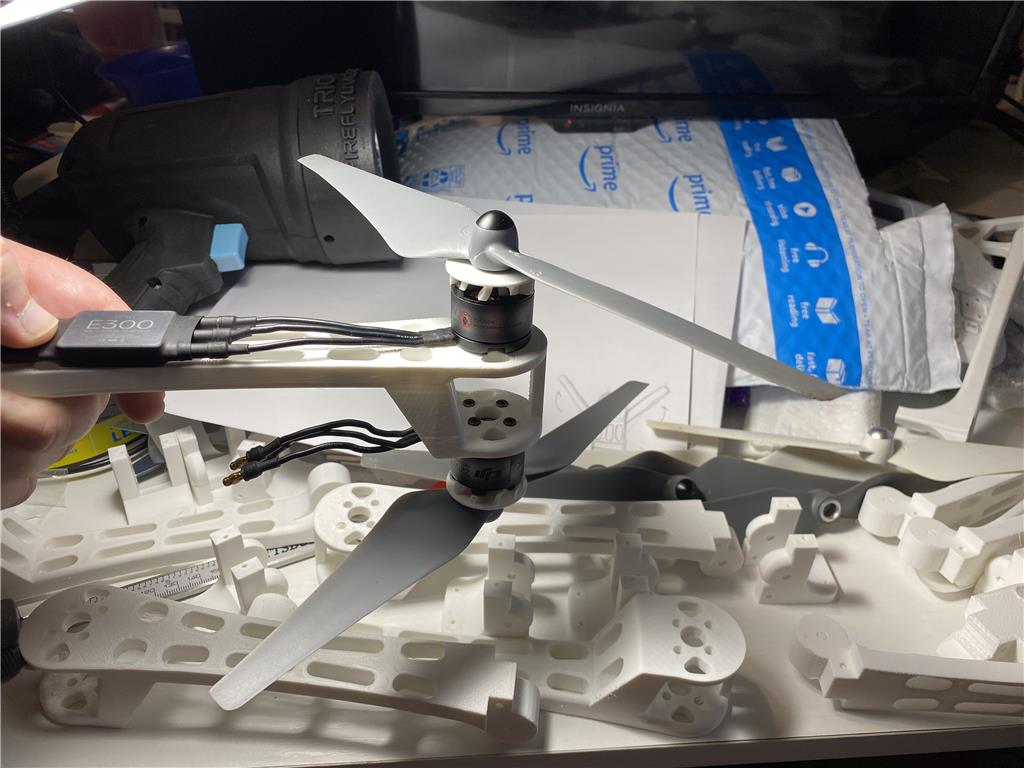
This is the design for the dual motors on the frame
Hi EZ Ang, I am not ready to do a video just yet, I have just started assembly, it has been planning , design and ordering parts up until now. I hope to be testing the motors for the first time within a couple days.
I use a DJI drome to fly
EzAng
I do like DJI stuff, they seem to be pretty solid. This is my first flying project. I am basing it off the original equipment that was on the F550 HEX Flame Wheel. I will still use the motors, esc and center of the frame, but the rest is custom 3D printed.
I was lucky that I managed to get the parts cheap from ebay. I have one set that is sealed brand new and one mildly used $200 Each.
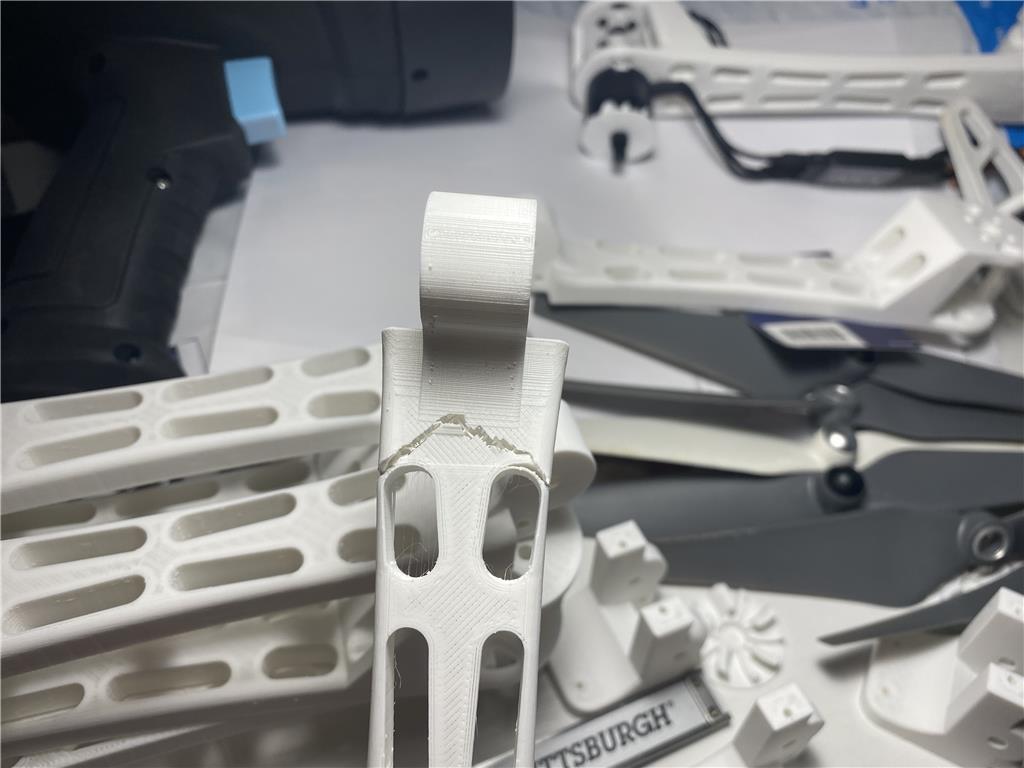
I stress tested the 3D printed arms, the point of failure is about a inch from the elbow that allows the arm to fold down. The next set of arms I will see what I can do to thicken this area, more shells and make the vents smaller.
Here is a shortlist of the things I needed to get to get started
Tools that I needed to buy Prop Reamer from Great Planes Custom cut acrylic prop balancer Allen wrenches
Parts obtained-
F550 Flamewheel Kit New F550 Flamewheel Kit slightly used 2 x 6000 mah Zeee Lipo Batteries 1 Lipo charger , El Cheapo PixHawk 4 Radiolink Radiolink Transmitter and Reciever Radiolink GPS Raspberry Pi 4 Raspberry Pi Camera 12 slow fly 1045 props 12 prop nuts 2 x 500 watt power supplies, they are 12v but I plan to trim them up to as close to normal charged 3S battery voltage 12.6 volts. 4 x Heat sinks for power supplies after I strip their metal housing.
I have a Generator for the event I need to take this setup somewhere in the future where electricity is not available.
Needed still 400 foot of power cable, lightweight aluminum 2 conductor
Long range 5g or 2.4 G directional antenna , likely TP link
110v to 240 volt step up converter ( this reduced the thickness of the wire needed to power the drone and cuts cable weight by nearly half by doubling the voltage).
I am considering using Ethernet to feed open internet to the drone, but technically you could vertically connect to Wifi with a directional antenna for a good signal too.