

He is a Standard (ish) Inmoov called BOB. Started on the 20th of October 2023, All printed so far with PET-G mostly done with one printer, as my second Anycubic, seems to associate mainly as a Microwave when left unattended.
Bob did start on MRL and the Arduino, but I lost faith quickly, when the MRL would not recognize the Arduino as Megas and decided there were Uno's most of the time, so nothing worked until you could get the software to recognize the Mega's again, usually lots of re-booting involved.
I then found the ARC software online as an alternative and decided to bite the bullet as they say and go down the EZ-B v4 route and ARC. I have to admit rather than just trying to use the MRL software, I find using ARC easier actually, as you can start with nothing in your project and basically add to it . You understand then what your adding, what it's doing and also if you really need it or not in your project.
You also have the ability to just start another project to try what ever you want , just to test things without messing up your control project for the Inmoov, I managed twice to lose everything I had got working with MRL.
In less than two weeks since I got the EZ-Bs and ARC, Bob now runs on his EZ-Bs under ARC. He does eye tracking , Camera in the eye, but needs a better camera as its rather blurred for some reason. Has chat functionality both typing and Microphone, has a few scripts done to test the Servos he has so far.
From the neck downwards he's just a none working shell really ,at the moment, as I have not bought all the Hitec servos ( yet ? )
Next stage will be to mount him on a stand, so he's off my desk and then I can build the arms and hands, I have the Servos for the hands
Undecided yet what PC to run him with, at the moment his ARC software is running on an 8 year old basic Asrock mini PC, MRL was a struggle running on it. It might end up being a latte panda, as I assume even a basic one would run the ARC software quite adequate ?
What BOB will end up doing, I have no idea really , I just came across it on the internet in October and thought I could build one of those if I tried
His progress so far as of the 28/12/2023


Programming
Skills used so far
Camera Soundboard Script Collection Bing Speech recognition OpenAI ChatGPT Talk servo v2 horizontal Servo Speach Settings Auto Positions Notepad Conversational Menu
Parts & Materials
All Printed so far with PET-G
Has two EZ-B v4
a 24 light Neo pixel running on an Arduino Uno
Waiting for Fuse box and various other bits ordered to add, and then commit to buying all the Hitec HS-805BB servos needed.
Discover more robots

Charleybot's Project Multi-Omnibots 2000

Jim's Ezbv4 Robot Lawn Mower


Very nice and alot of hard work goes into your creation.
What a great build. Keep us updated with the progress.
Great job.I like the neopixel implementation.
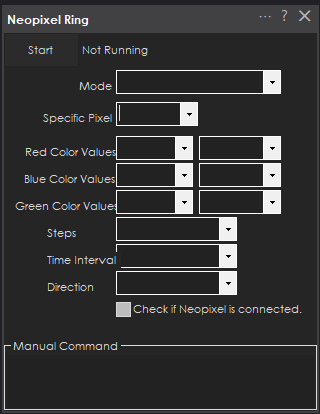
Thanks, the Neopixel at the moment is running on a scprit on the Nano, in a loop. I have tried the Neopixel Skill, got the code to upload to the Nano OK, but in the actual skill all the boxes remain empty, not sure I have connected the nano to the EZ-B correct, as it won't show up as connected , the only thing it finds is the com port the nano is on.
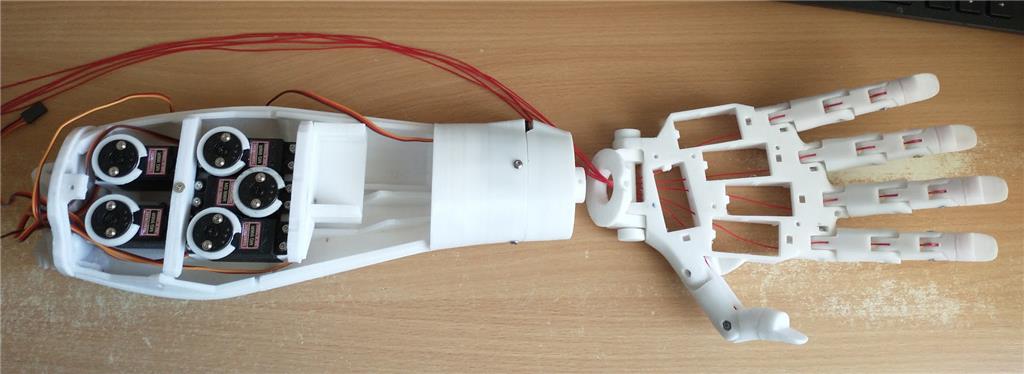
After More Printing I now have a Right Forearm and a V2 Hand, and now a wait for bits to arrive from far off lands I did mount the Wrist servo in the new position for the V2 hand, bracket stiill attached in the picture, but that then uses up a lot of the available space. So I them printed the bits and mounted it back in the original V1 hand mounting position. That will leave a good large space, if the cables and wires and tubes for the V2 hand still fit OK.
I did mount the Wrist servo in the new position for the V2 hand, bracket stiill attached in the picture, but that then uses up a lot of the available space. So I them printed the bits and mounted it back in the original V1 hand mounting position. That will leave a good large space, if the cables and wires and tubes for the V2 hand still fit OK.
I could put an IoTiny in the forearm, which I assume others have done as well ?. Then the finger sensors and 6 servos would, or could all connect to it direct and the only wires needed to the arm back to the body would be power wires ? . It also does away with me trying to solder wires and components to break out boards, which I have found out I am useless at eye sight not up to that anymore.