
Here's a quick introduction to my Robotic Arm. If you have any questions - I'd be happy to answer them.
By bhouston
— Last update
Discover more robots
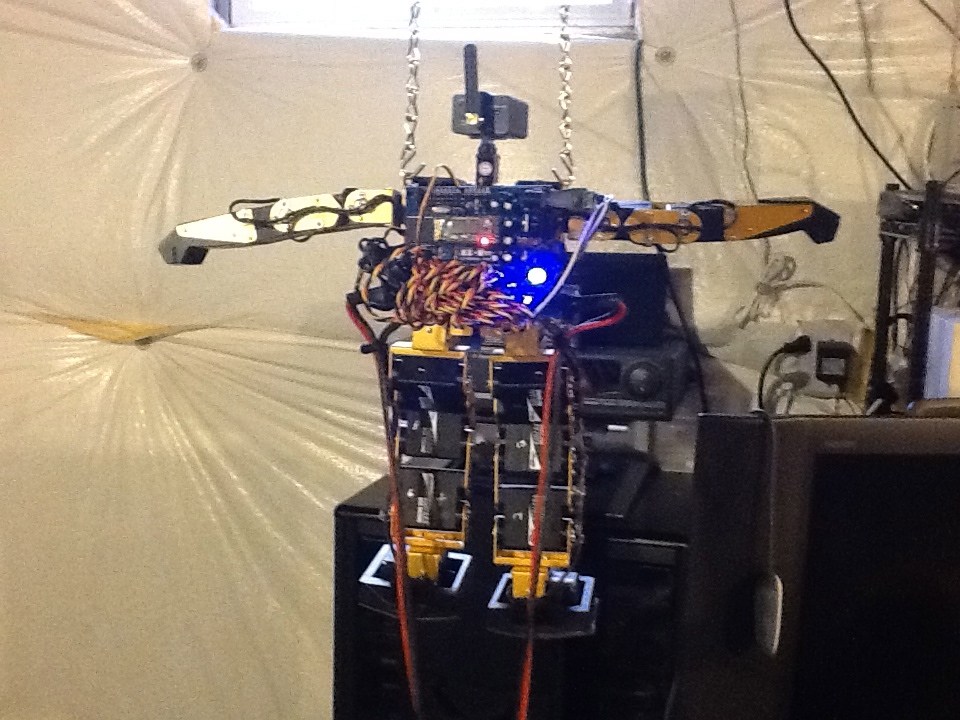
Kleinjd's 17 Servo Biped (Formerly Robonova)
16 Hitec HSR-8498NB servos on dual external boards plus a 17th camera servo; 0.38A @6V draw, 1500mAh NiMH per foot and...
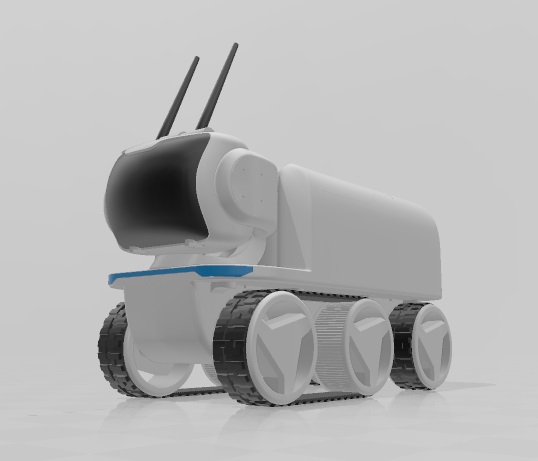
Jstarne1's Levi Rover Modular Robot 3D Print
LEVi Platform latest model - the most updated LEVi Platform available.

Steve's Grace’S First Robot
Boxbot dance demo built with 9-year-old Grace, a family robotics project fostering her interest in building robots

You have achieved one of my goals with fluid motions at the end effector. I am also interested in accurate positioning to points in space. In simple terms I am trying to experiment with "poor boy" polar coordinate robotic arms that approximate the motions and some functions that you find in industrial robots such as ABB, Fanuc, and MotoMan. Watch the spray painting arms used in auto manufacturing if you want to see fluid motion to perfection.
I just recently stumbled across EZ Robot and I really like what I find here. Prior to any awareness of EZ Robot, I constructed an arm with five degrees of freedom using small military surplus, aircraft DC servo motors with worm drive gearboxes. These operate best around 24-28 volts but they will run on 12VDC. The slew rate is very fast but positioning is a rather inaccurate due to gear backlash. Next I need to add feedback resolvers or encoders to close the position loop for each joint which should help with the overshoot. I am using a combination of Advanced Motion Control servo amplifiers along with a couple of home brew H-bridge PWM amps. Then I hope to be able to apply digital control using software found on EZ Robot. In conclusion, all this is a fun educational experiment. I have no intention of developing a product.