
Here's a quick introduction to my Robotic Arm. If you have any questions - I'd be happy to answer them.
By bhouston
— Last update
Discover more robots

Redzone's Inmoov With A Slight Modification
Animate an Inmoov robot with EZB4 scripting, expanding servo control with EZB3 compatibility and iterative learning and...
Zxen's My First Robot: Eve
Robomannequin Eve: She's my first.
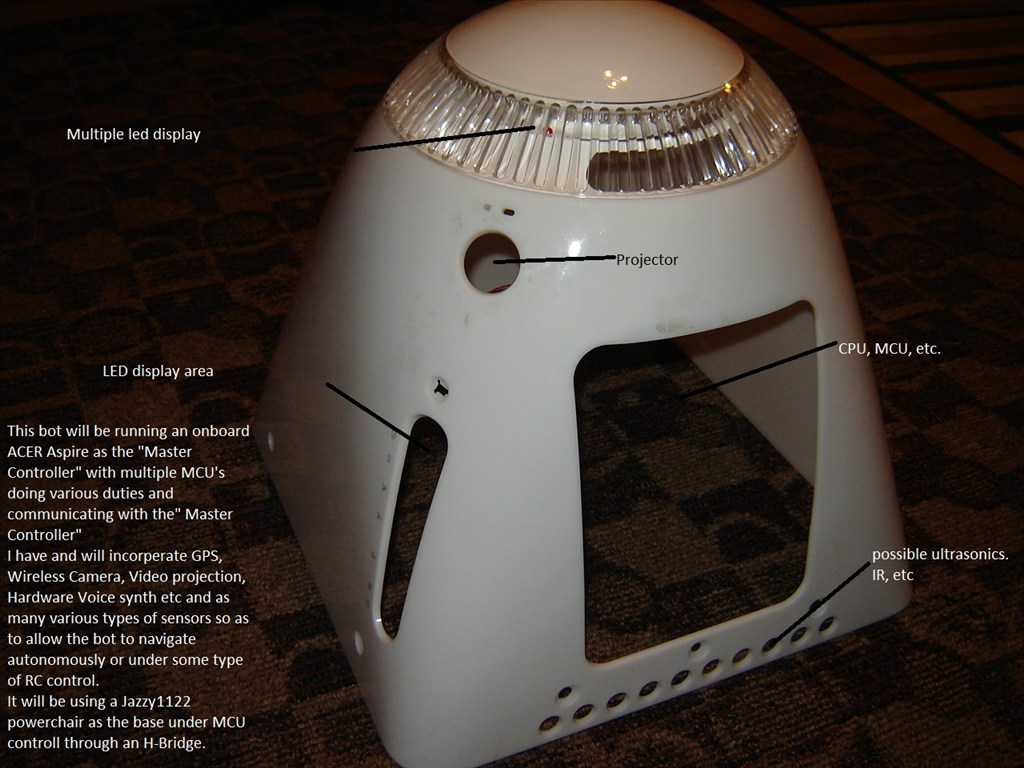
Putt's Bigmack
BIGMACK robotics project begins using an E-MAC housing for the head, showing initial build photos and writeup.

@Bob.... I assume it's 3d printed? Did you get the files on Thingiverse? Never mind... LOL.... Your video just explained it...
how did you extend the camera cable going to the ezb controller. where did you get the connectors?
@antguru, I cut the cable supplied with the camera and spliced in a length of ribbon cable. You can now buy a longer cable from the EZ-Robot store ( I didn't want to wait)
thanks
@antguru... The ez robot store now has extended camera cables (60cm)...
@Anthony, Your robotic arm looks great. Are you going to release the print files opensource?
The robotic arm I made, from opensource files, was inspired by comments made by Stelobarry on this forum about how robotic arms like these can change the life of a person with limited mobility.
I am working towards some sort of programming that could be used to operate the arm to carry out simple tasks. My goal is to have the robotic arm search for and recognize an object asked for through a voice command and then carry out what ever task is specified. Once I/we have the program for that, it will be released open source. Then anyone could use it to run any robotic arm controlled by EZ-Robot controllers and software.
Let us know what your intentions are with your robotic arm. If you are selling them, how much will they cost?
Not counting the gripper movement, it looks like you have four degrees of freedom in the joints. Does the EZ Robot hardware/software have the ability to handle joint relationship kinematics during coordinated moves? Trying to position the end effector to a point in space requires some tricky motion control among several servos at the same time. I am impressed with your work. I would like to follow your lead and use EZ Robot but its capability to perform coordinated joint motion is critical. Is there a software simulator that serves as a teach pendent similar to commercial arm robots? Any comments would be greatly appreciated
@Brian, I don't know how Anthony is controlling his "virtual arm".(he kind of high jacked my post). I programmed the movements of my arm thru a series of "auto positions" and timing to get fluid motion. I don't know what your experience is with Ez Robot software but it is quite EZ to do this. What are you trying to do?