




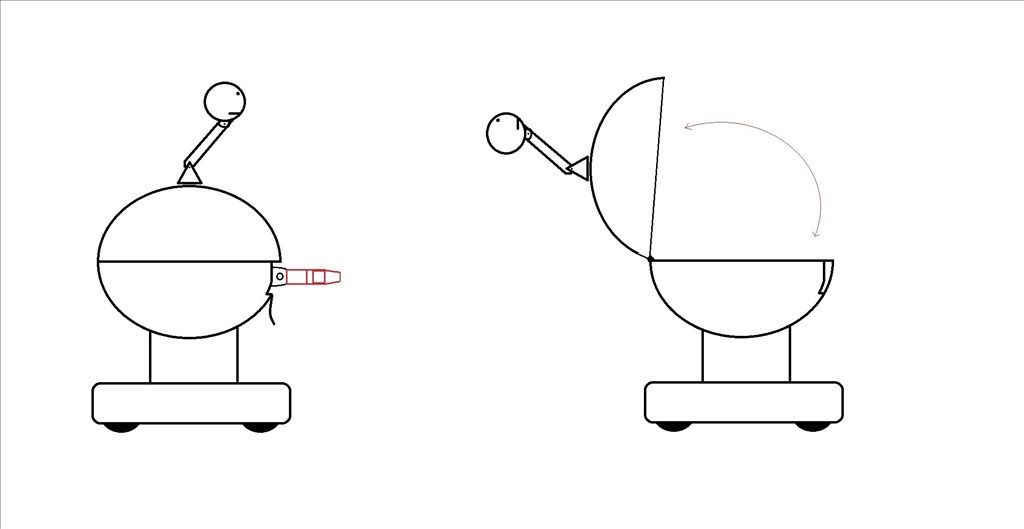

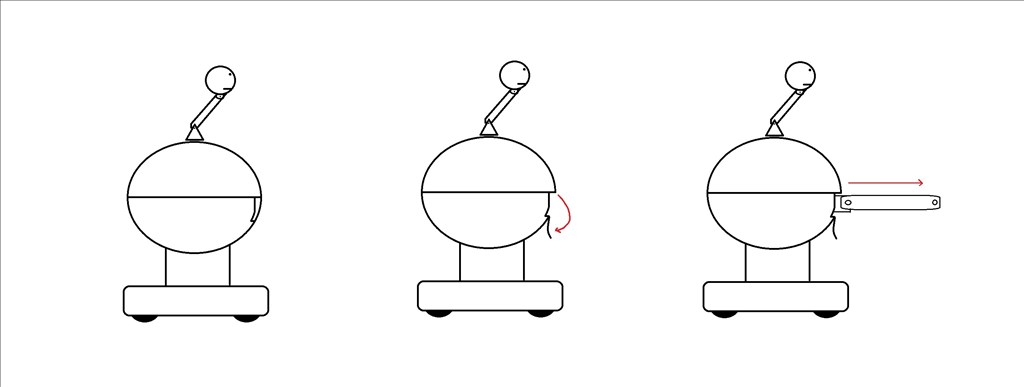



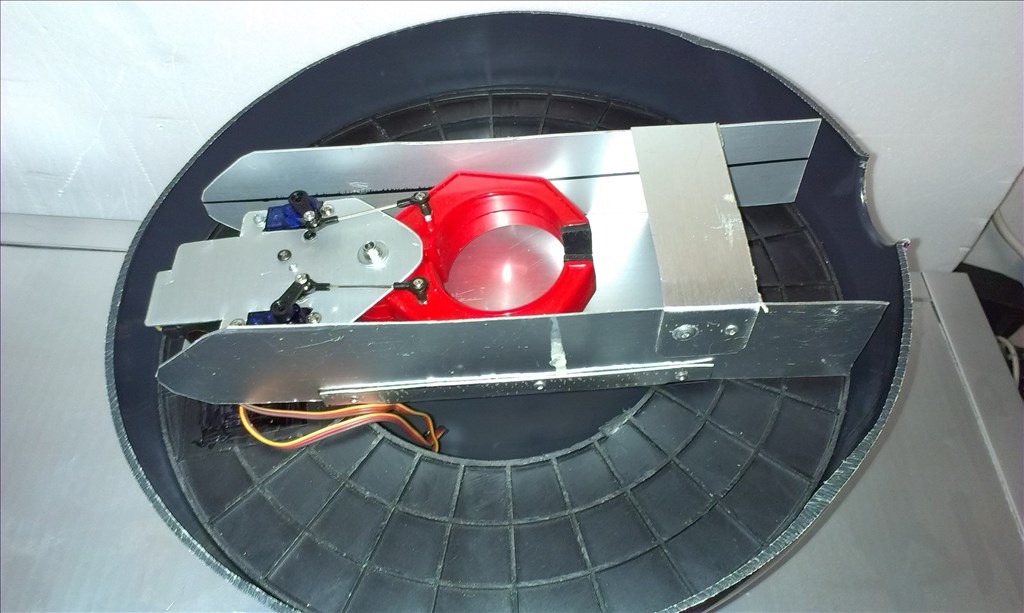

This the result of too much free time lately, the new project is a robot drawing a sphere, using the low-cost approach to the selection servos and other components, with a retractable arm that comes from inside through a gate and once inside collected no space and is also protected when not in use.

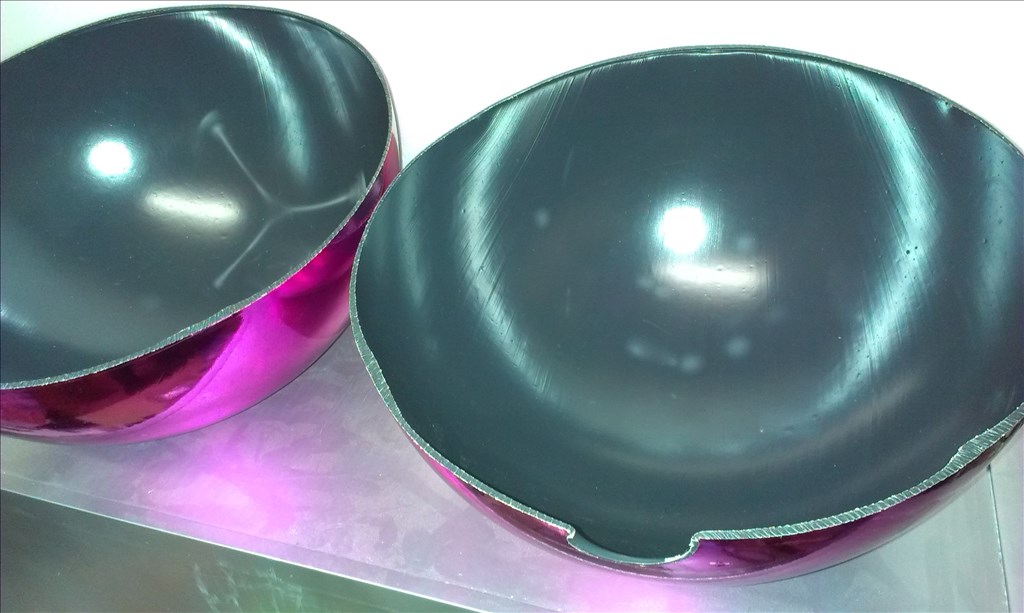
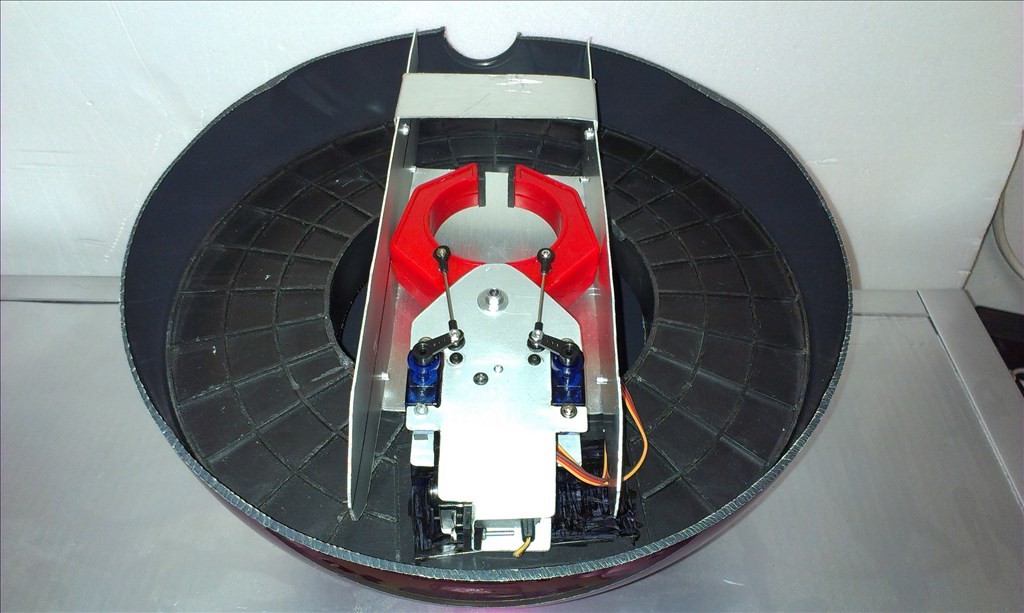
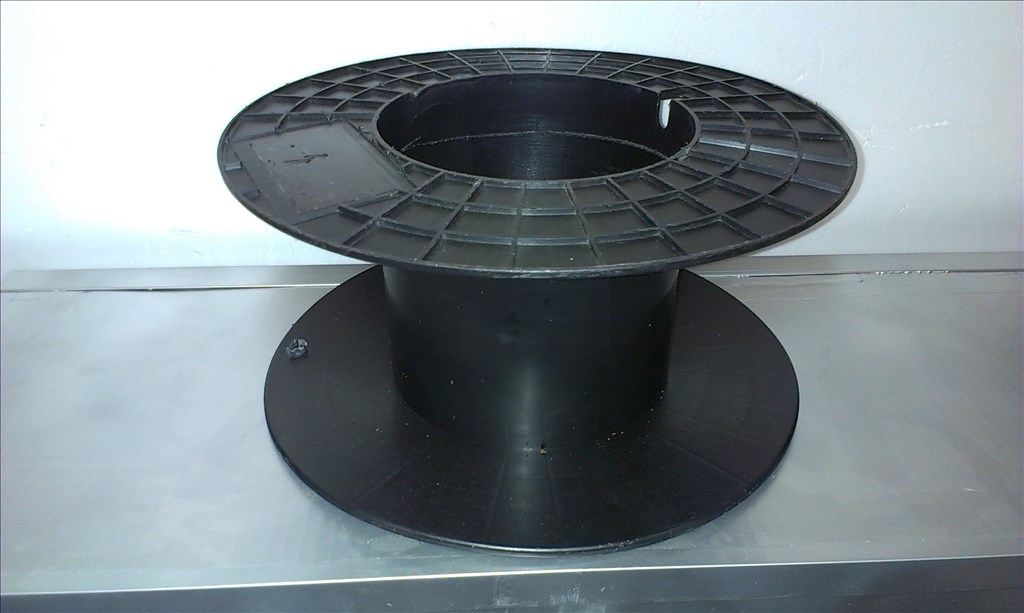
This is an area of 28 cm in diameter (11 inches) of PVC, is a large Christmas ball, once cut in half I've noticed that need structural refurzos to hold its shape once installed all the electronics and mechanics. So I will use sections of an empty roll of wire for reinforcement.

By R2D2
— Last update
Discover more robots

Ezang's MEASURING DISTANCE TO OBSTACLE USING THE HC-SR04
Measure distance in inches with HC-SR04 on Arduino using Synthiam ARC serial monitor; converts pulse microseconds to...

Ezang's Some Examples From The Past Of Glyphs, Glyphs With...
Glyph examples with augmented reality and QR codes using a USB camera and the EZB4 with camera and sample code

Ezang's Video 2 Of My Metal Arm Gripper With An Arduino And...
Metal arm gripper with Arduino controlled via EZ-Builder (Synthiam) - Video 2 showing setup and control

Thanks Technopro, I think your drawing helps to understand your words, I guess it is a regional expression that google translator can not overcome, if your robot is going to have a sphere will be willing to open your project post to comment or suggest .
ok thank.
Do you speak espanol? If i know i can put my posts in english and spanish. or what ever language you speak. this could help our comunication, with us both doing similar projects.
For me it would be much easier esribir in Spanish, but I think as I respect most who speak English, and we all understand it is best to stick with the English. Normally I have no trouble understanding the messages (with some exceptions) Greetings.
ok.
i hope i didnt affend you in any way.
i will be working on my robot today so be watching for the project in project showcase.
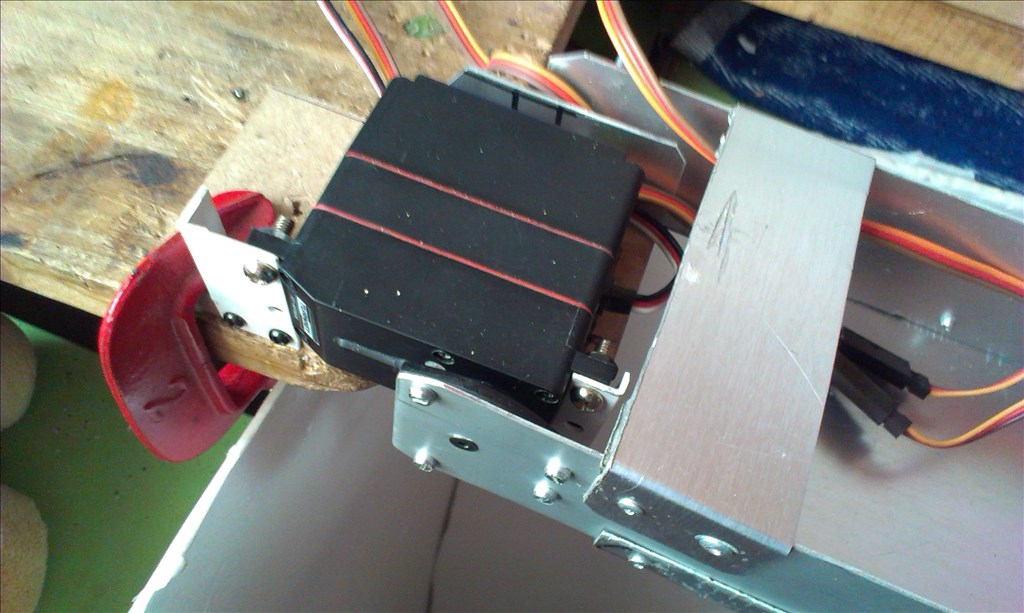
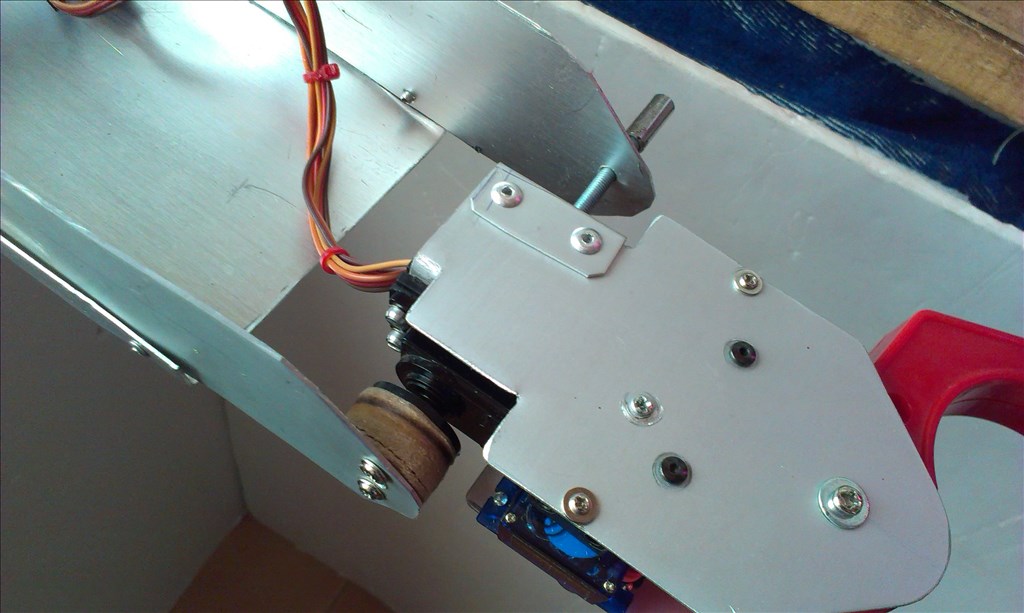
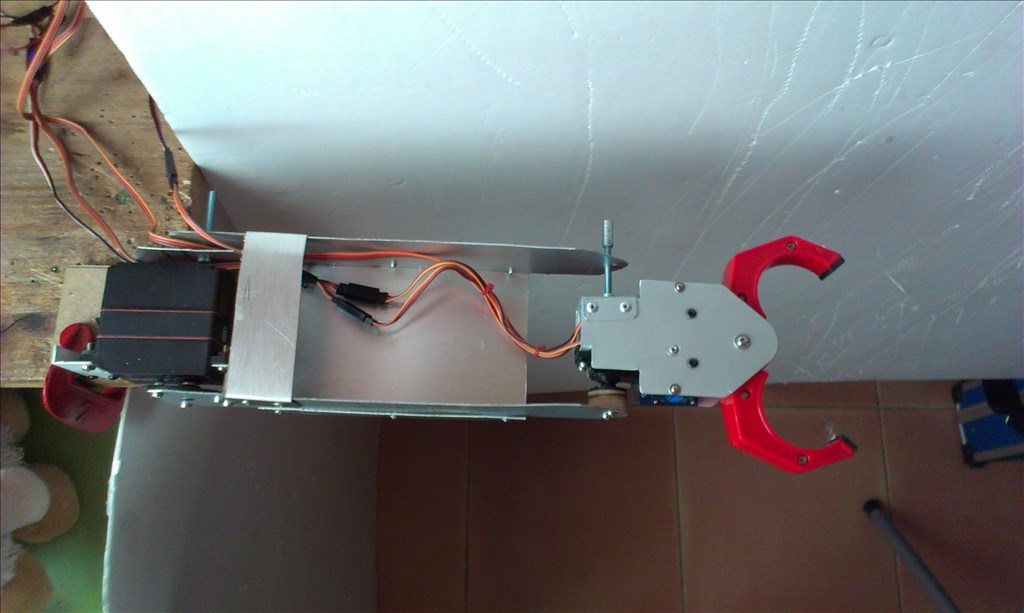
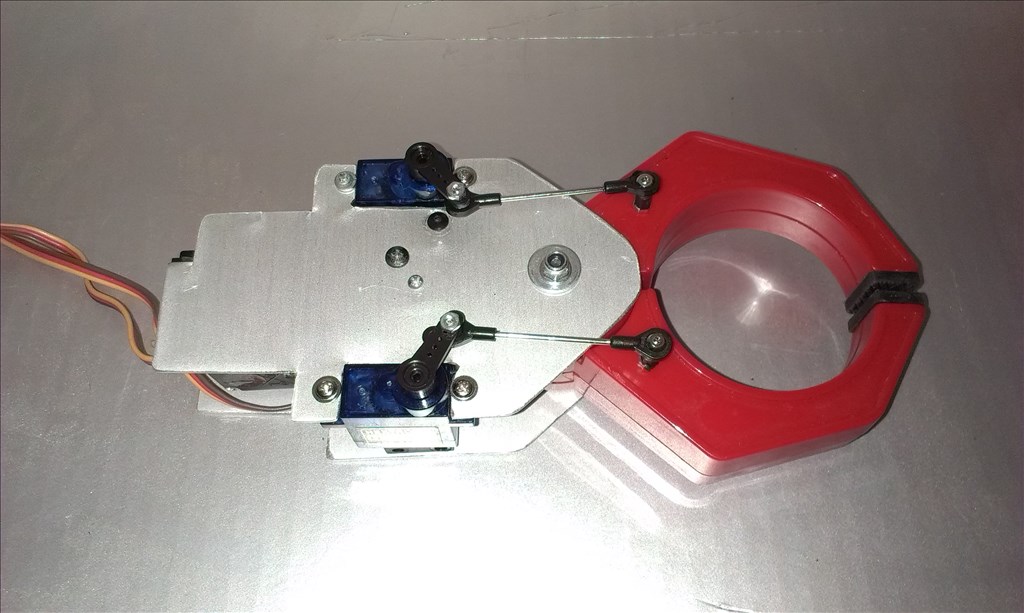
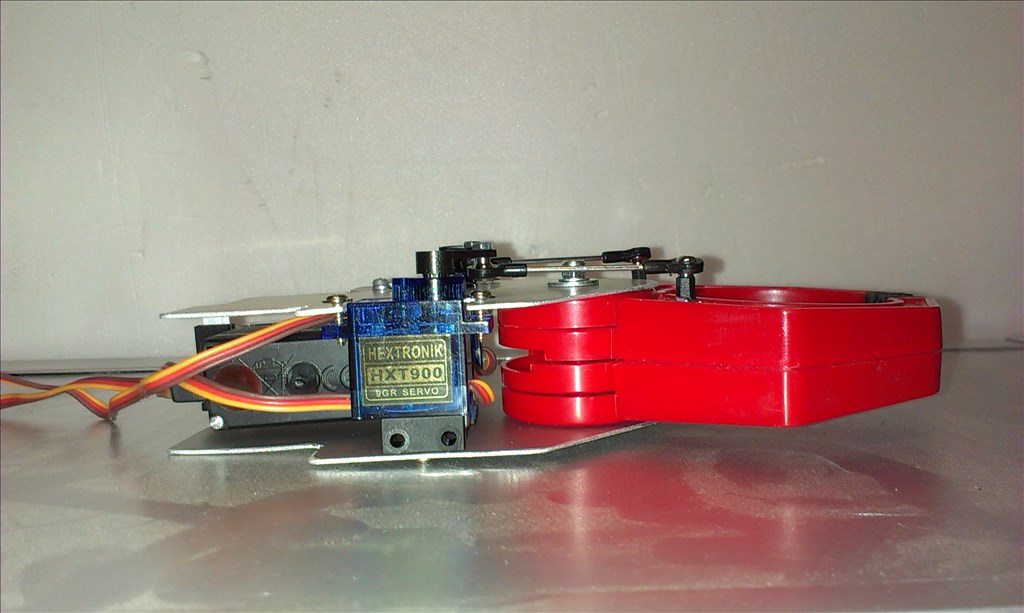
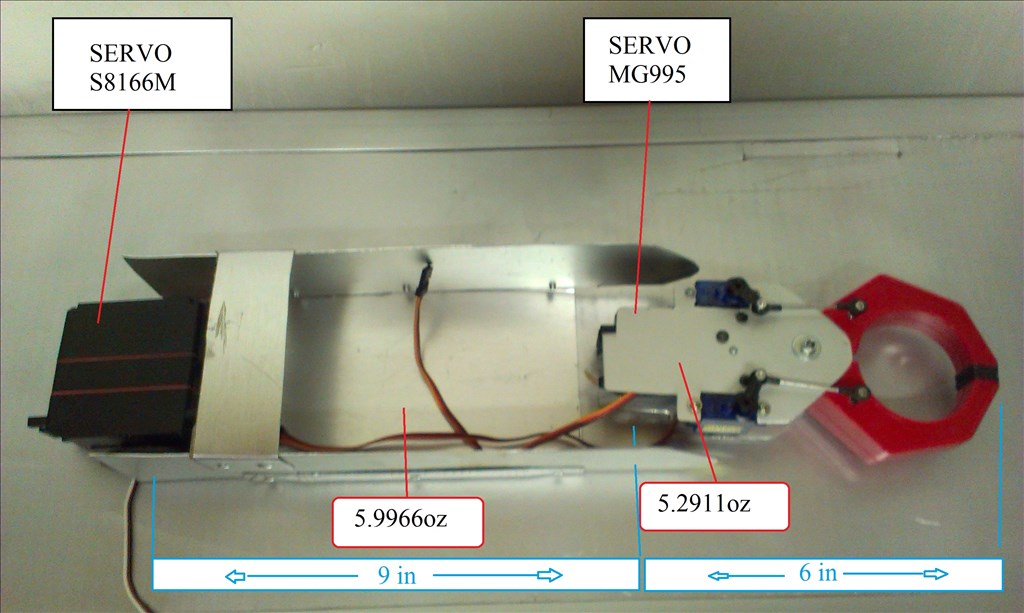
Following progress on the project, the arm works better than I expected, has successfully raised objects 370 grams (13.05oz), more than estimated. The arm is pretty hard so I will make another arm of the same thickness of aluminum, but with better quality, more rivets and correct some misalignment.
The speed of the servo (servo speed control) is 4 for elbow and wrist servos, servos speed 1 for the claw. The independent power of the elbow and wrist servos is mandatory. The servo s8166m goes up to 2 amps of consumption when working with weight.
:)
that is a really nice arm design. nice movement