

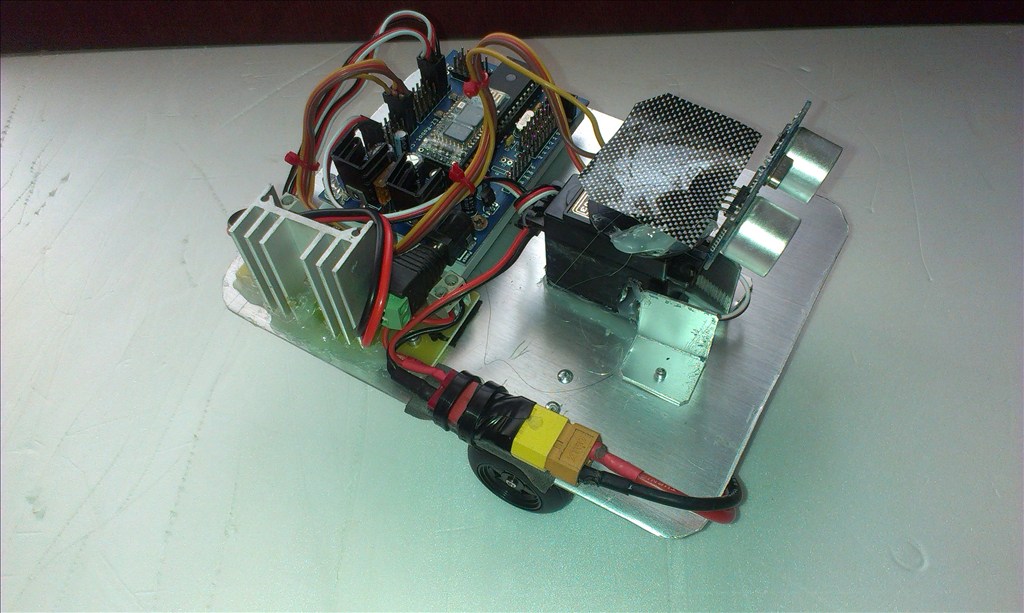
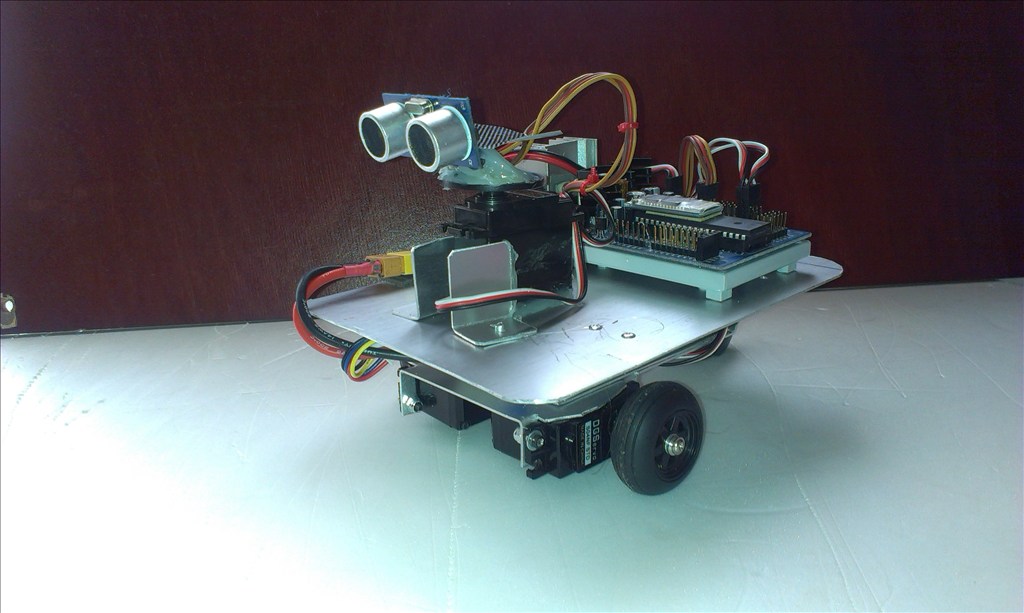
This is my new pocket robot: Navigator. Constructed from aluminum, cut with scissors, and assembled with rivets. Powered by a 11.1 v lipo battery, 1600mah passing through a regulator 8v (good voltage without fan) to feed ez-b. All heatsinks remain warm and has a great autonomy in the current configuration. My purpose is to experience in navigation with only the essentials, and start with a ping sensor and squeeze the most of what can be achieved. The second phase incorporates collision sensors with switches on the side of the robot and delanera. Then I would like to taste the lateral measurement with a ping sensor on each side of the robot (these would be fixed) and thereby expand the project in a modular, finishing with a camera on an upper floor, compass, etc. ..


Discover more robots

Cem's Eyepod Using Neopixel & Ardiuno Nano, Conrtolled Via A...

Johnnybib's Ezrobot Myo Wii Remote Controlled Robot Arm


What fun. He's a busy little guy. Good work.
I like that video! Well done It's sort of mesmorizing.... Watching him cruise around.. He's got personality!
It's sort of mesmorizing.... Watching him cruise around.. He's got personality!
Cool video! The guy has game! Cool use of sonar to scan for obstacles and avoid them.
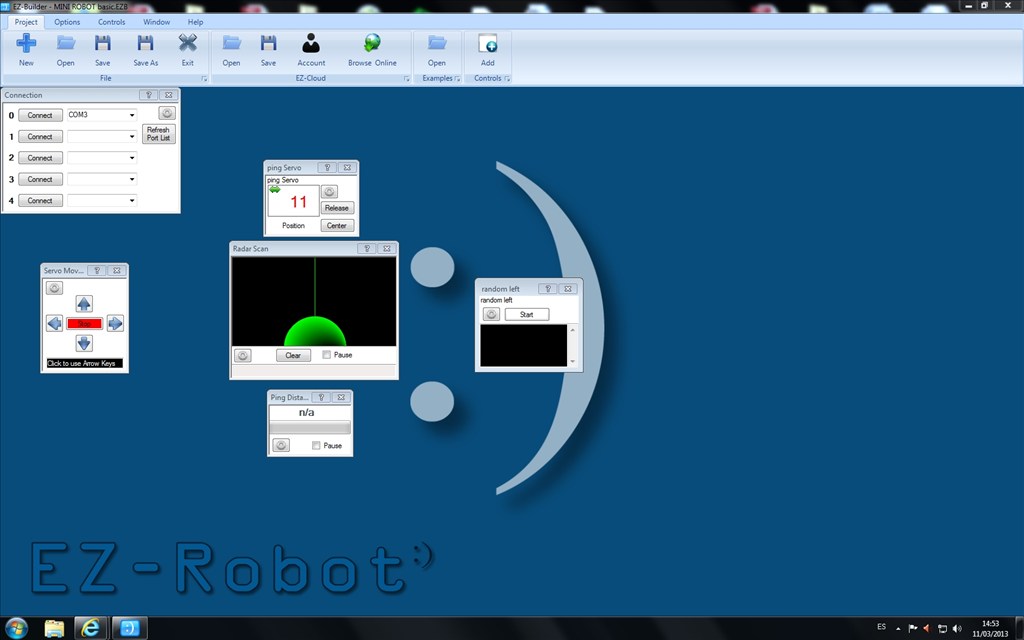
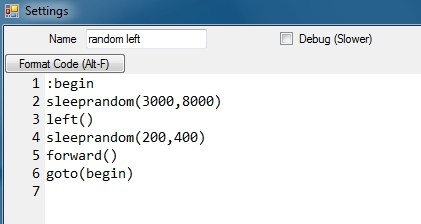
Thank you all guys! The navigation of the video file could be used for cleaning robots, running paths and random approach to the walls, the core file is this: MINIROBOTbasic.EZB And programming simple, just play with the levels of radar scan and random times.
He's cool. Reminds me of a insect trying to find his way around.
Great job on the bot! It does a real good job of navigating. My cat loved the video. He seldom even notices the computer, but that got his attention. He jumped up on the desk and watched it three times through.