

-634918751738750000.jpg)
-634918752058906250.jpg)
-634918752417968750.jpg)
-634918753328125000.jpg)
-634918753552812500.jpg)
-634919384849687500.jpg)
-634919385116250000.jpg)
-634921282099941406.jpg)
-634921282607519531.jpg)
-634921285303984375.jpg)
-634921286081347656.jpg)
-634921286592539062.jpg)
-634921286894394531.jpg)
-634921287070869140.jpg)
-634917821569140625.jpg)
-634917822546923828.jpg)
-634917822752392578.jpg)

-634900401634345703.jpg)

-634912687919804687.jpg)
-634912688173408203.jpg)


-634922231866093750.jpg)
-634922232032812500.jpg)
-634922232710625000.jpg)
-634939426884531250.jpg)
-634941099600468750.jpg)
-634941163205781250.jpg)
-634941163592031250.jpg)
-634941164157343750.jpg)
-634941164341718750.jpg)
-634941924885156250.jpg)
-634941925538281250.jpg)
-634941925705468750.jpg)
-634941925862812500.jpg)
-634922980927968750.jpg)
-634922981092500000.jpg)
-634930603620000000.jpg)
-634930604267656250.jpg)
-634930607122656250.jpg)
-634937753237500000.jpg)
-634937753531250000.jpg)
-634937753872500000.jpg)
-634936811644843750.jpg)
-634936811841718750.jpg)
-634936812280156250.jpg)
-634936812576718750.jpg)
-634936812777343750.jpg)
-634892840812441406.jpg)
-634881851798437500.jpg)
-634888436524687500.jpg)
-634888436834531250.jpg)
-634888437341093750.jpg)
-634888438173750000.jpg)
-634888439034531250.jpg)
-634892832319306640.jpg)

-634892833816953125.jpg)
-634892834249091796.jpg)
-634892834434267578.jpg)
-634892834808886718.jpg)
-634892835278447266.jpg)
-634892835590283203.jpg)
-634942812445937500.jpg)
-634942812734375000.jpg)
-634942813123437500.jpg)
-634942813315625000.jpg)
-634942813599062500.jpg)
-634942814779687500.jpg)
-634942815003593750.jpg)
-634942815713906250.jpg)

-634943735723437500.jpg)
-634943736305937500.jpg)
-634943736485156250.jpg)
-634943737022343750.jpg)
-634943737185312500.jpg)
-634973207973593750.jpg)
-634973208133750000.jpg)
-634973208281406250.jpg)
-634973208663125000.jpg)
-634973208818281250.jpg)
-634973208953281250.jpg)
-634973209073125000.jpg)
-634973209337656250.jpg)
-634973209688906250.jpg)
-634973036686250000.jpg)
-634973036806562500.jpg)
-634973037173906250.jpg)
-634973037551562500.jpg)
-634973037657812500.jpg)
-634973037990000000.jpg)
-634973038105156250.jpg)
-634973038811406250.jpg)
-634973039078281250.jpg)
-634958526087812500.jpg)
-634958526257812500.jpg)
-634958526471093750.jpg)
-634958526682968750.jpg)
-634972882420156250.jpg)
-634972882651406250.jpg)
-634972882767343750.jpg)
-634972883194375000.jpg)
-634972883309062500.jpg)
I posted this in the wrong section I guess, but here is a link to my newest bot - RoboRAD. I am combining a RAD 2.0 base and a robosapien.

By bret.tallent
— Last update
Discover more robots
Sudo's Project Shogun
Shogun humanoid: 15in bioloid-based EZ-B robot with 26 DOF, wall-powered, stands and waves; progress, photos and...
DJ's Myo Gesture Tutorial
Control EZ-Robot with the Myo armband using gestures and accelerometer to trigger actions, events, and move servos.

Pabi!O's Pabi!O's Wall-E
Custom WALL-E robots: compact interactive and larger U-command builds using old sound board, servo-packed upper half,...

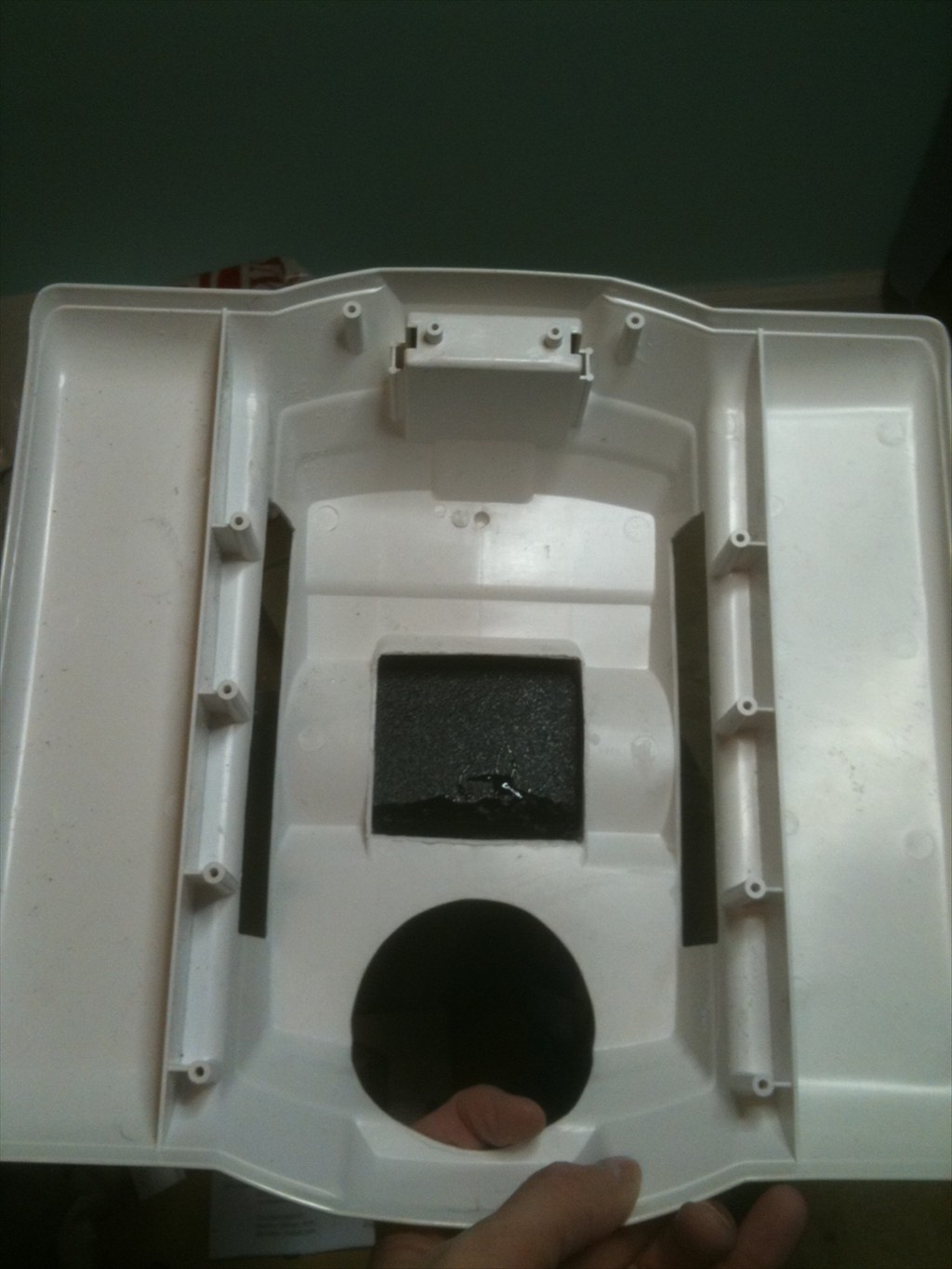
Oh on your riser just keep it simple. I like to use wood 1/4 ply and superglue (just to tack it together) then epoxy all your seems that touch. Basically just build a box the same width and length of your base and then cut a large hole outto run wires through. Then just screw that bad boy together with wood screws.
Wow, true 4 wheel drive with tracks. That sounds really cool. How would you make sure both motors on one side turn at the same rate? I think that would be the biggest problem. If you do decide to do that I might be interested in the unused bottom to cut out the sides and use that for my riser haha.
So the shape of the base is not square, it has some funky lines and it is super skinny back by the gear boxes. I'm actually thinking of using a hobby grade 1/8" plywood and adding in thick pieces wherever the screw mounts are. Tack with superglue and epoxy. What do you think?
The only way I could make sure they turn aprox the same rate is to use two different h bridges fed off the same pwm signals. At that point they should be fairly close together. Im considering running 6 volts though I want to run 12.
I did the sound deadening mat on the one gear box.
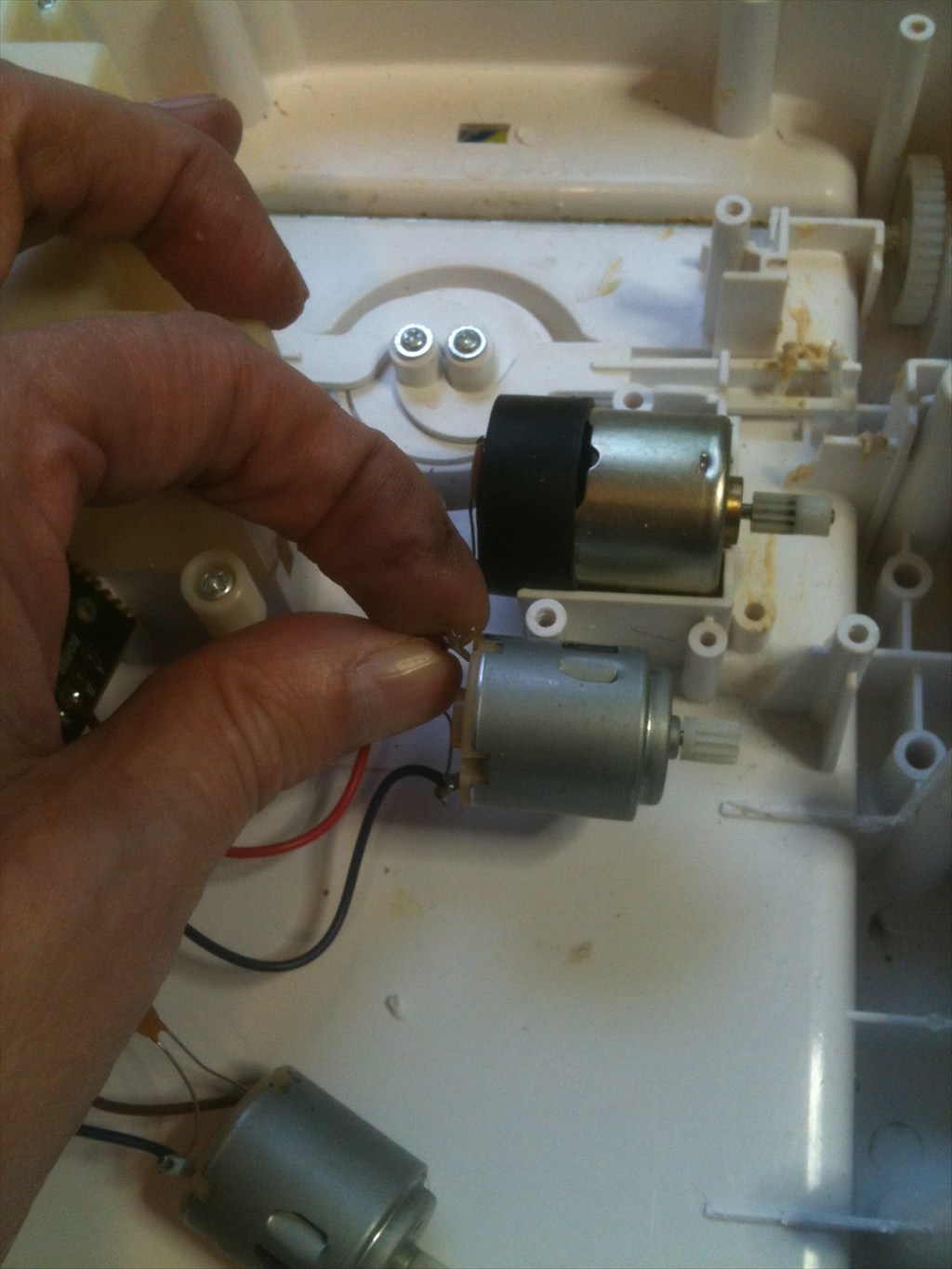
Then I did a test fit of the other motor - looks pretty good. Now I just need to sound deaden that gearbox and then I can hook up my motor controller.
So modifying the RAD base to take the omnibot motors was really easy - almost too easy. But it sure gives me a lot stronger motors in the drive section.
That looks great (and too easy but let's not complain about easy mods!). I guess I will be using those photos as references soon as I just picked up another Omnibot (for spares for the Hearoid build) and a broken RAD too (ebay is becoming a huge weakness! How to spend a Christmas bonus in 5 minutes...).
I take it the sound proofing is just bog standard Dynamat (or similar) as used in cars? That's something else I'll be taking away from looking at this build.
Yup, Dynamat. Yes, I am addicted to Ebay as well; much to the chagrin of my wife. lol
So have you tested this guy yet. I wanna see it perform. Im especially interested if if it proces plenty of torque at 6 volts since the motors are so much larger. I wonder if anyone knows the model of the mabuchi motor that you used here so maybe I could buy a handful. 4 gearboxes with these larger motors should be unstoppable!
Not yet, maybe this weekend. I was planning on giving it 12 Volts, but I can test it at 6 Volts too. They were right out of my Omnibot, so you could look at yours and see if you can tell. These are from the regular omnibot, not the 2000. The motors from the 2000 were way too big. That would be one strong drive section for sure. Two motors per side.