

-634918751738750000.jpg)
-634918752058906250.jpg)
-634918752417968750.jpg)
-634918753328125000.jpg)
-634918753552812500.jpg)
-634919384849687500.jpg)
-634919385116250000.jpg)
-634921282099941406.jpg)
-634921282607519531.jpg)
-634921285303984375.jpg)
-634921286081347656.jpg)
-634921286592539062.jpg)
-634921286894394531.jpg)
-634921287070869140.jpg)
-634917821569140625.jpg)
-634917822546923828.jpg)
-634917822752392578.jpg)

-634900401634345703.jpg)

-634912687919804687.jpg)
-634912688173408203.jpg)


-634922231866093750.jpg)
-634922232032812500.jpg)
-634922232710625000.jpg)
-634939426884531250.jpg)
-634941099600468750.jpg)
-634941163205781250.jpg)
-634941163592031250.jpg)
-634941164157343750.jpg)
-634941164341718750.jpg)
-634941924885156250.jpg)
-634941925538281250.jpg)
-634941925705468750.jpg)
-634941925862812500.jpg)
-634922980927968750.jpg)
-634922981092500000.jpg)
-634930603620000000.jpg)
-634930604267656250.jpg)
-634930607122656250.jpg)
-634937753237500000.jpg)
-634937753531250000.jpg)
-634937753872500000.jpg)
-634936811644843750.jpg)
-634936811841718750.jpg)
-634936812280156250.jpg)
-634936812576718750.jpg)
-634936812777343750.jpg)
-634892840812441406.jpg)
-634881851798437500.jpg)
-634888436524687500.jpg)
-634888436834531250.jpg)
-634888437341093750.jpg)
-634888438173750000.jpg)
-634888439034531250.jpg)
-634892832319306640.jpg)

-634892833816953125.jpg)
-634892834249091796.jpg)
-634892834434267578.jpg)
-634892834808886718.jpg)
-634892835278447266.jpg)
-634892835590283203.jpg)
-634942812445937500.jpg)
-634942812734375000.jpg)
-634942813123437500.jpg)
-634942813315625000.jpg)
-634942813599062500.jpg)
-634942814779687500.jpg)
-634942815003593750.jpg)
-634942815713906250.jpg)

-634943735723437500.jpg)
-634943736305937500.jpg)
-634943736485156250.jpg)
-634943737022343750.jpg)
-634943737185312500.jpg)
-634973207973593750.jpg)
-634973208133750000.jpg)
-634973208281406250.jpg)
-634973208663125000.jpg)
-634973208818281250.jpg)
-634973208953281250.jpg)
-634973209073125000.jpg)
-634973209337656250.jpg)
-634973209688906250.jpg)
-634973036686250000.jpg)
-634973036806562500.jpg)
-634973037173906250.jpg)
-634973037551562500.jpg)
-634973037657812500.jpg)
-634973037990000000.jpg)
-634973038105156250.jpg)
-634973038811406250.jpg)
-634973039078281250.jpg)
-634958526087812500.jpg)
-634958526257812500.jpg)
-634958526471093750.jpg)
-634958526682968750.jpg)
-634972882420156250.jpg)
-634972882651406250.jpg)
-634972882767343750.jpg)
-634972883194375000.jpg)
-634972883309062500.jpg)
I posted this in the wrong section I guess, but here is a link to my newest bot - RoboRAD. I am combining a RAD 2.0 base and a robosapien.

By bret.tallent
— Last update
Discover more robots
Ezang's 3D Printing Again 7/18/2021 - Detecting A Sound File...
Mr. Metal returns - audio may be low; increase volume and leave a comment for EzAng.

Cobra71's Beginner Starts With Dickeys Rolling Olli
Build a Rolling Olli robot with Synthiam ARC and EZ-B for Xbox360 pad control, autonomous driving, pan/tilt camera,...
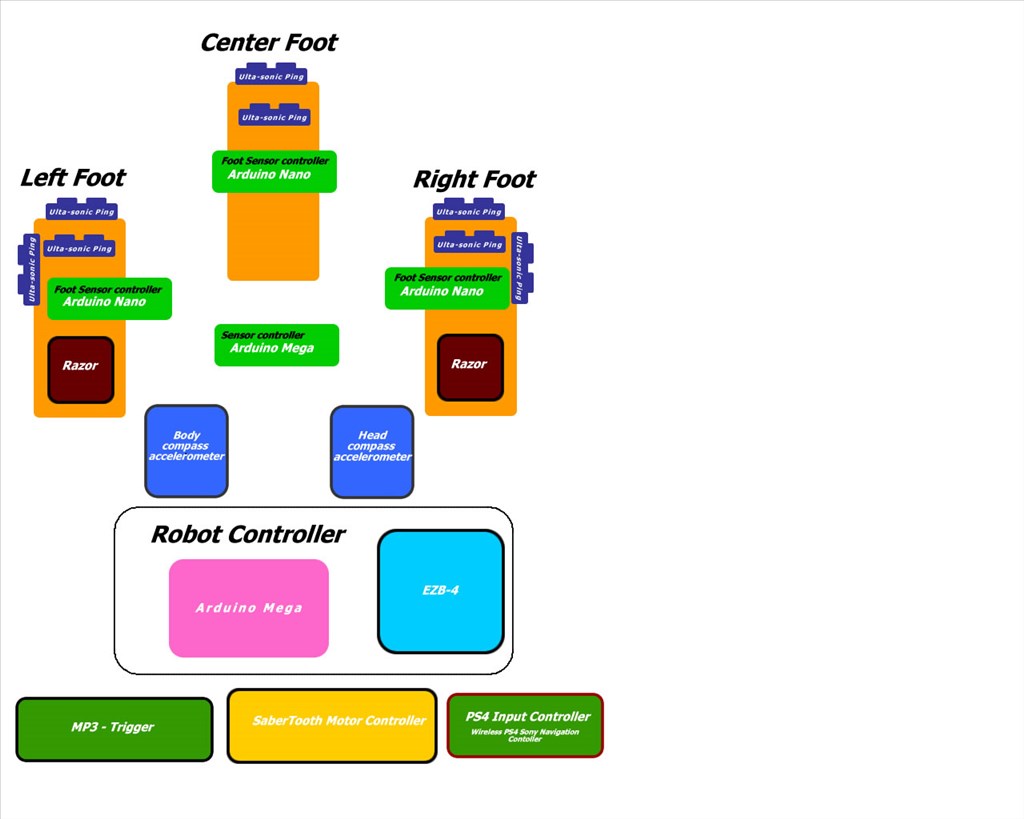
Luis's R2d2 Project Ready To Document
Open-source R2D2 build: Arduino sensor controller with ultrasonic foot sensors, Razor/Saber Tooth motors, PS4/EZB...

Yeah you're right, over time temp could really build up. Try to work in a chimney effect to assist in the airflow if possible. Intake lower than outflow.
Good ideas guys, I was going to fill in the curved opening under the top plate where Robosapien sits, but I will put vents there instead (and that is where the motor controller is mounted too). I do have room to mount a fan in the lower section so I can drill some vent holes for intake there and it can vent out on top. The mini light show has a fan on it so that will dump some heat into the body when that is running. So a fan pulling heat out at the top is in good order.
So after test fitting everything I am going to have to make a 1" riser. Oh well.
Any suggestions on how to make that riser?
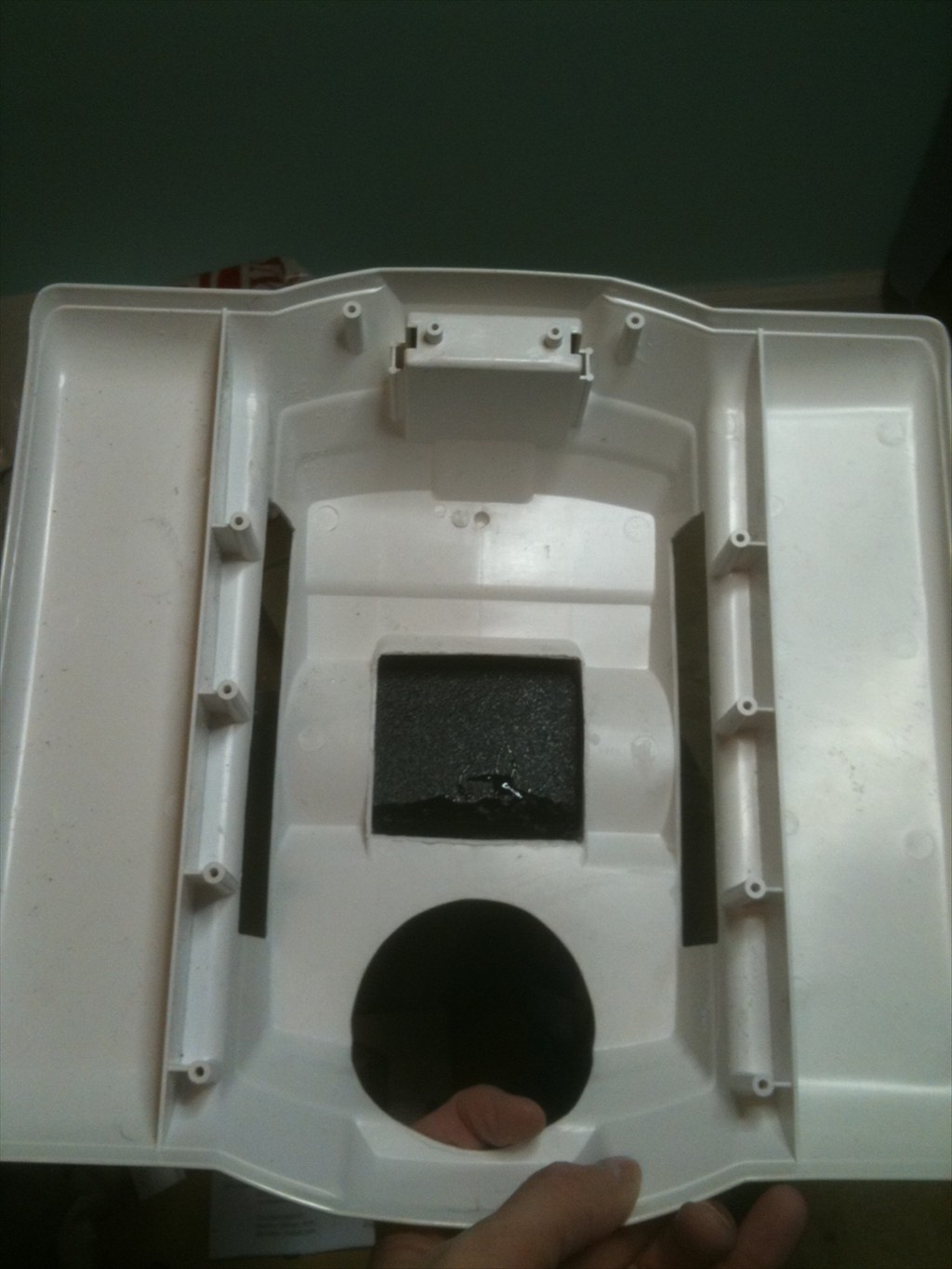
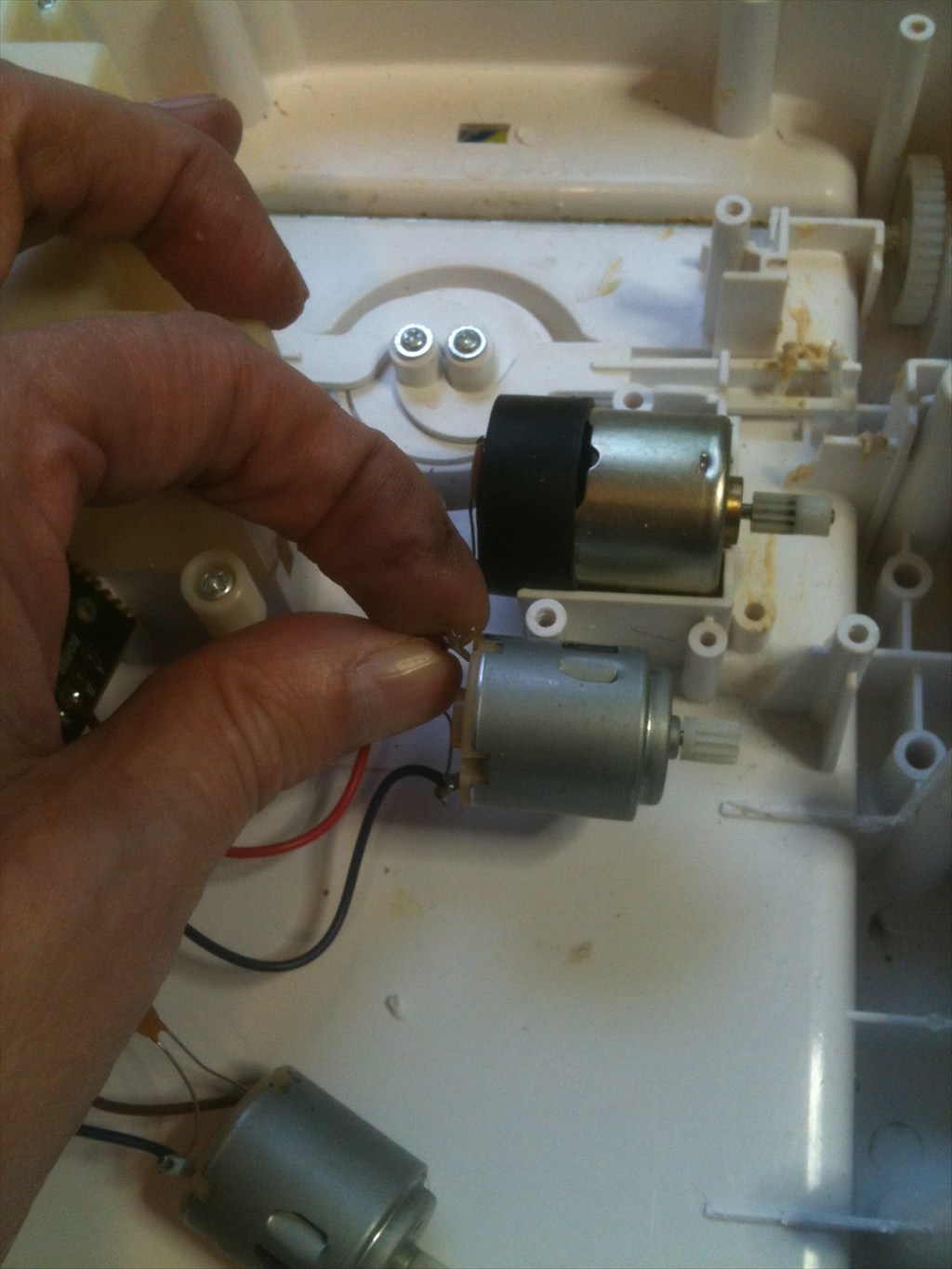
So I wanted to change out the wimpy motors that came with the RAD base with motors from an omnibot. In order to do that I needed to mod the motor mounts.
The mod is simple enough, enlarge the hole the drive shaft goes thru to fit the shoulder of the motor housing. And open up the rear of the motor mount so the larger motor can protrude.
It holds the motor securely and works fine. Just out out the back with nippers and an exacto knife, and enlarged the front hole with a dremel and grinding stone.
Wow that mod just looks way to easy
I bought a couple more rad robots and I had a "idea". Maybe cut up one base to put two together. That way there are two drive sprockets one on front and one rear. Also since I can cut right behind the front two wheels I could also have the front sprockets driven by their own gearbox and motors. Thats 4 motors and gearboxs total. What do you think of that idea?
I know huh? The motor just fits inside the box on the sides so it holds it really snug. It's so snug I may need to drill a few holes for ventilation for the motors.