
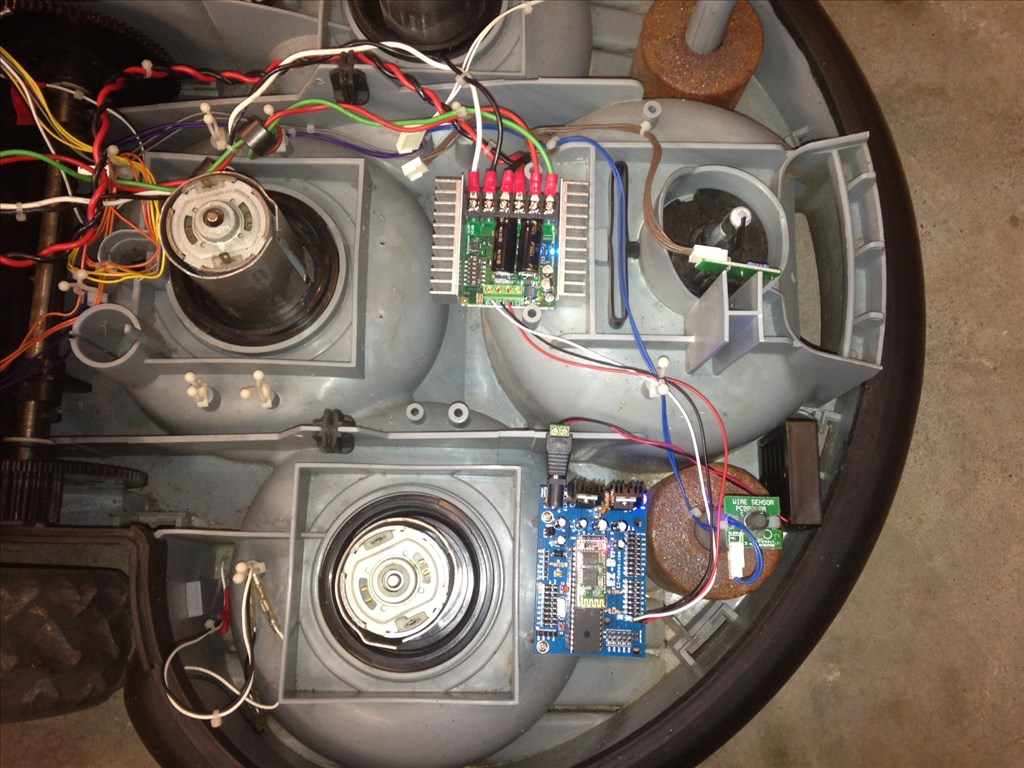
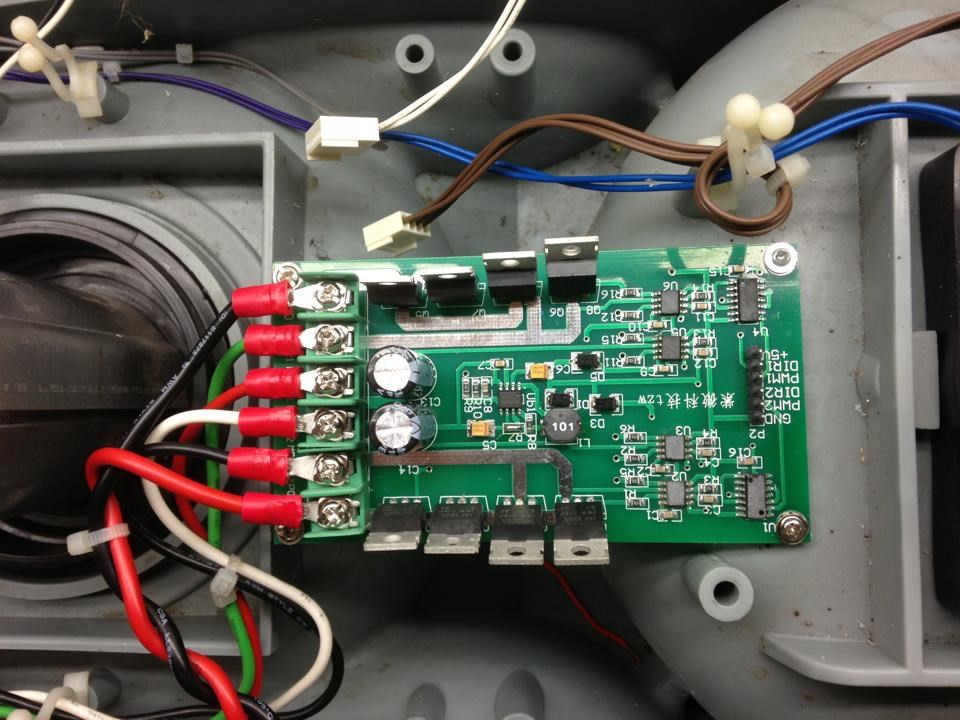
This summer I am hacking my old RL 500 Robomower and turning it into an autonomous robot using the EZ-B. I started the major hack today with the installation of a motor controller for the robot. The motor controller has two PWM inputs for speed of the motors and direction control for both. It does not match exactly the motor control board in the demo on the site, so I will need some community input. Also, I have mounted a Kinect and the EZ-B camera on the robot. Ideally, the ARC s/w could support the Kinect... (come on D.J. Sures!). I have the book making things see and I might run processing and an Arduino in addition to the EZ-Robot to do the Kinect functions, but the data interface would probably be through the EZ-B and the Arduino via I^2 C. Maybe the arduino/processing combo can tell the EZ Robot system some basic info about the surroundings to help in navigation. I am all open to suggestions and input on how to do this. I'd like to add arms too, but they will have to be light because I am using a tri-pod for the body. BTW - I am not using the mower to mow anymore, blades are removed, etc.


Discover more robots

Ezang's MEASURING DISTANCE TO OBSTACLE USING THE HC-SR04

Smarty's Ez-Robot Halloween Witch Esmeralda


Jstarne1, I got the sabertooth V2 and installed it on the robot tonight. Great advice. I don't yet really understand the values I used in the setup (found in another post), but it seems to work fine.
Here is the robot with the Sabertooth installed....
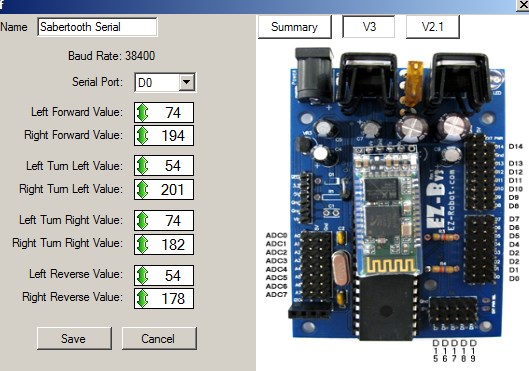
Here are my settings....
Finally decided to name the robot Max.
https://www.facebook.com/video/video.php?v=4622268806799
It says the video cannot be played , are you sure its public without restrictions?
I'm glad the Sabertooth H bridge suggestion worked out for you. Dimension Engineering is well known for a quality product in a battle bot community and it looks like that translates to reliability in personal robotics too. I'm about to install a 2 x 12 model that just replaced their previous 2 x10 that they discontinued.
hi out there - did you ever get a working solutions from this? I have also a cuple of Robomower RL's which I am looking for a template for con verting to some home-brewed solution...
Thiw, I have not messed with this robot in a long time. Now that we have the interface with the Kinect, I might look at it again. The robot is so powerful due to the gear ratio that you have to be careful to make sure you have a good e-stop!