















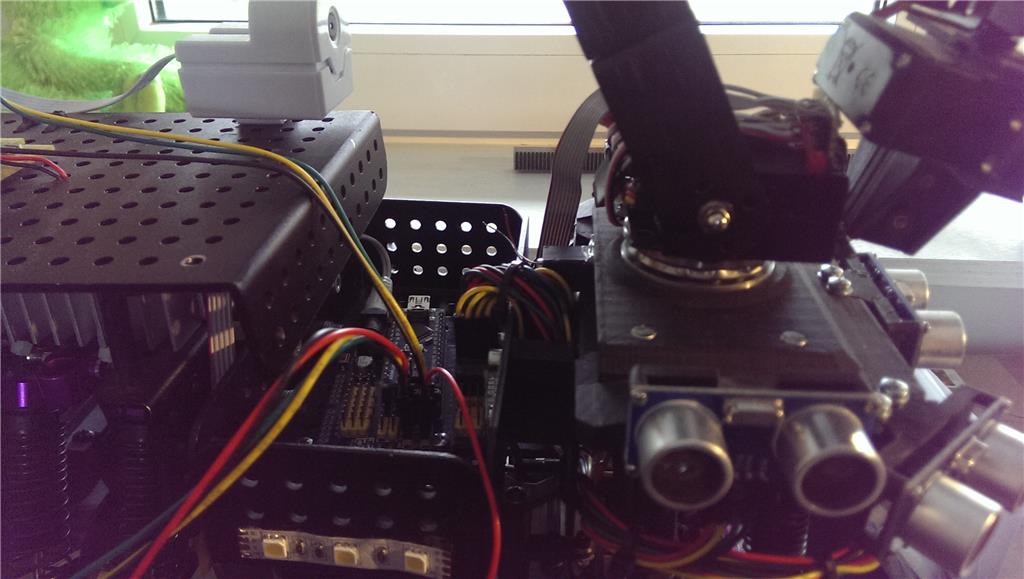

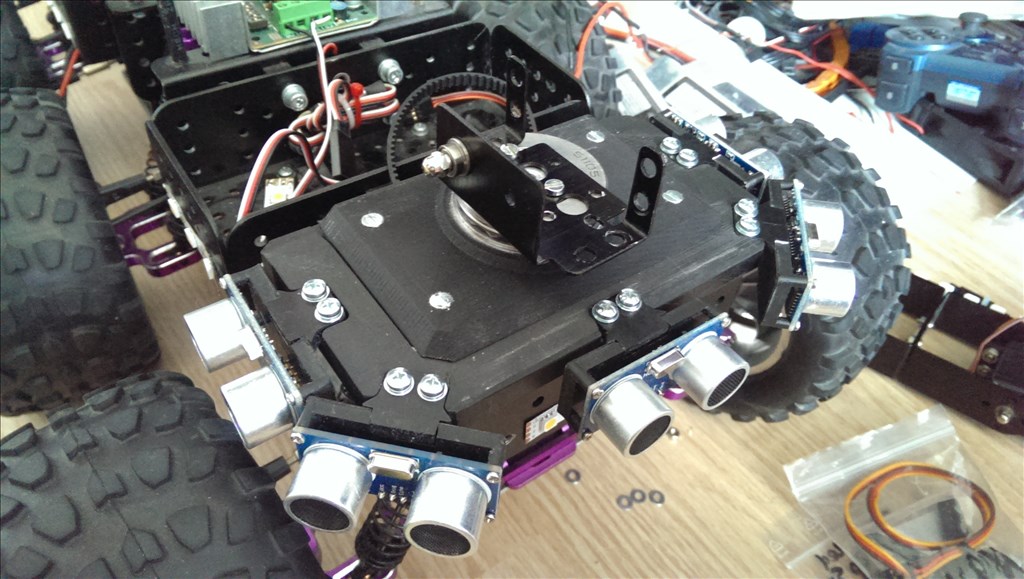
















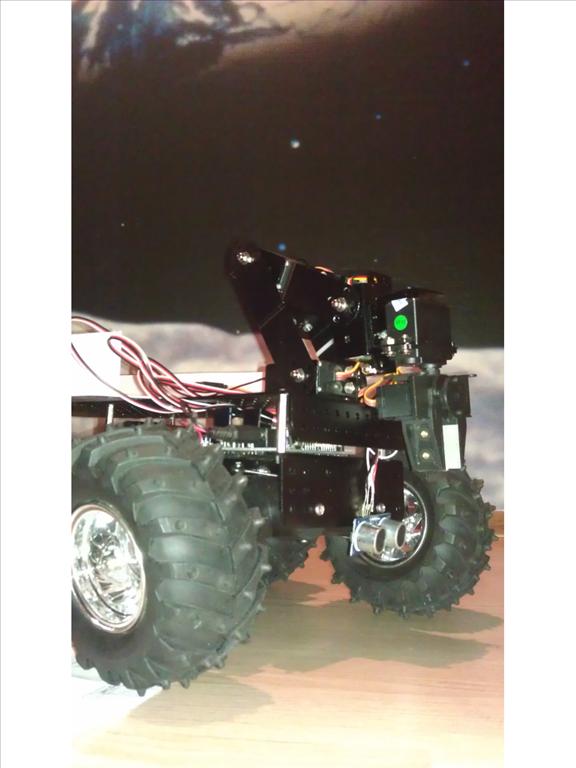
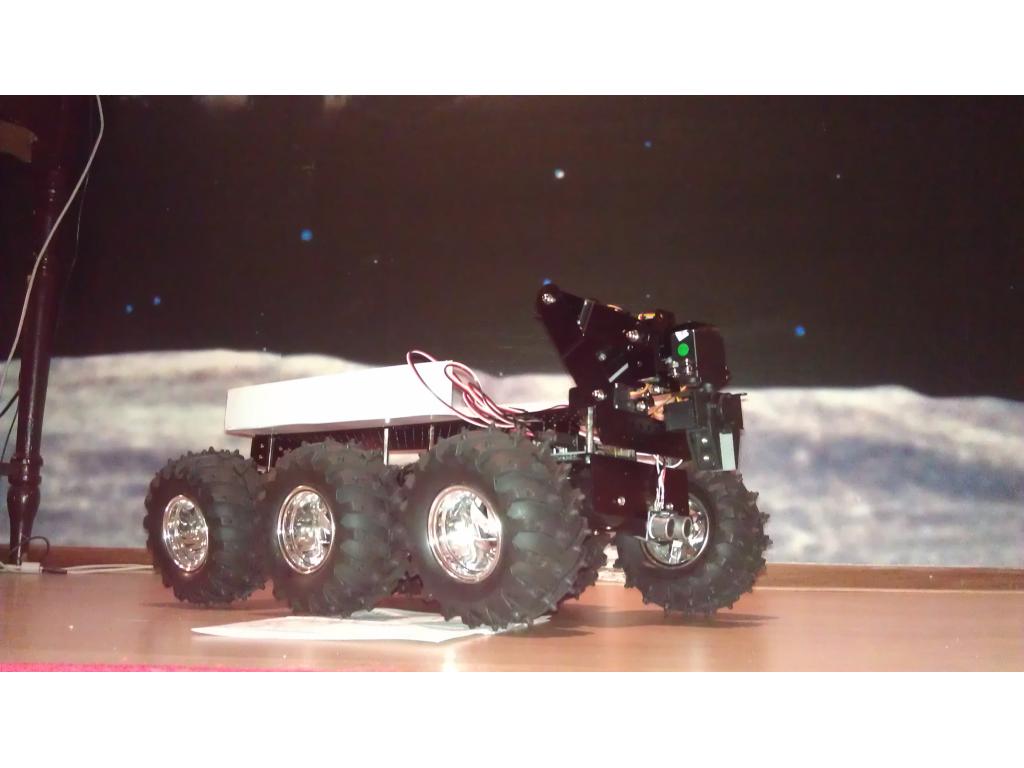















Hello fellow EZ-B'rs, As I finally discovery how to upload photos I thought it was time to share my robot with the world. It's called R.O.O.S.T.E.R which stands for: Remote Online Operating Scientific Testing Electronic Robot (took me about an hour to come up with that, but I like it).
The specs:
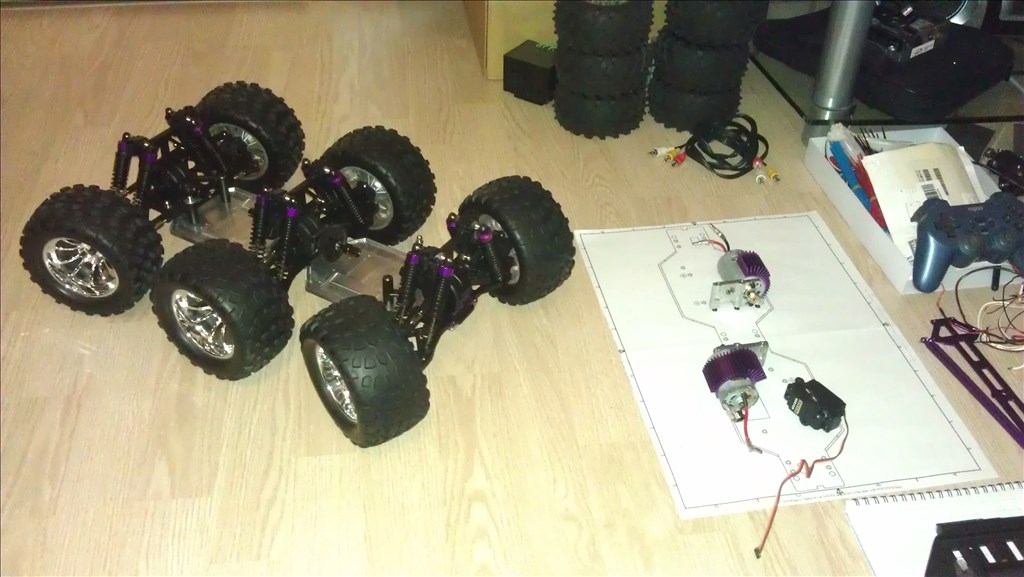
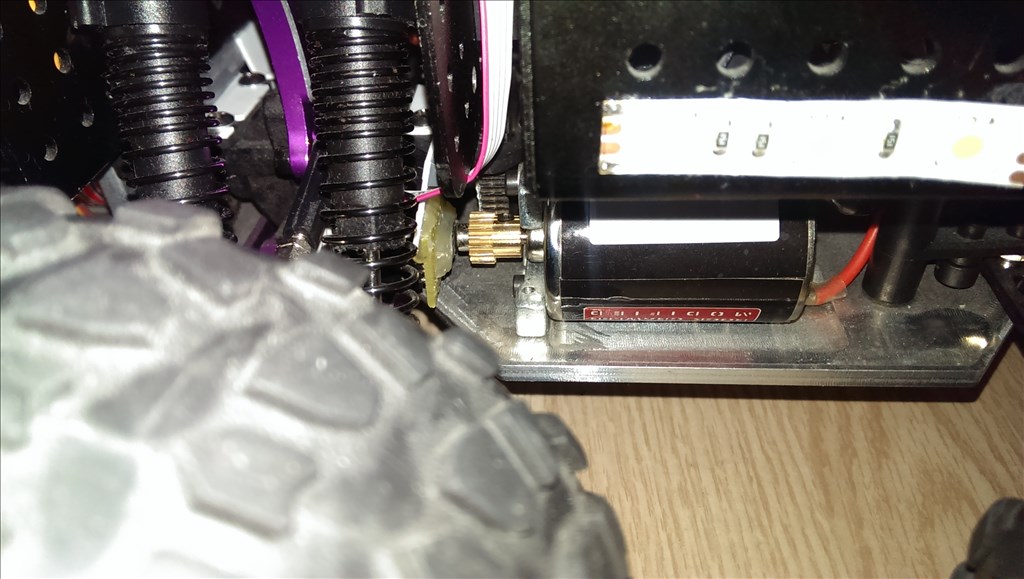
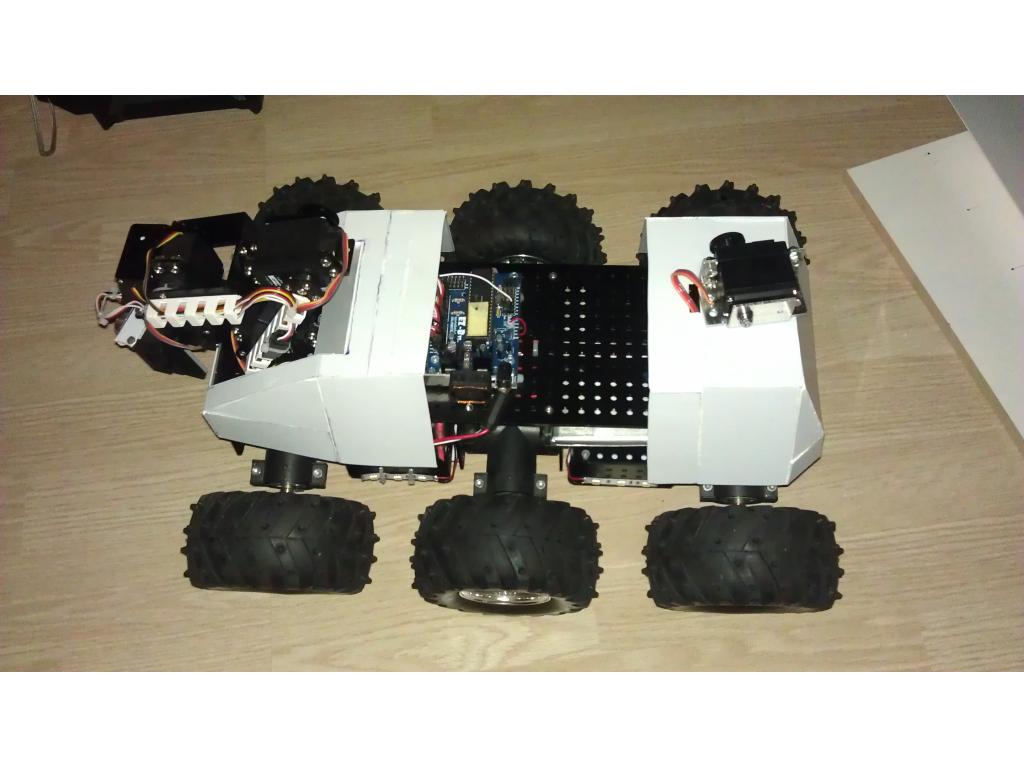
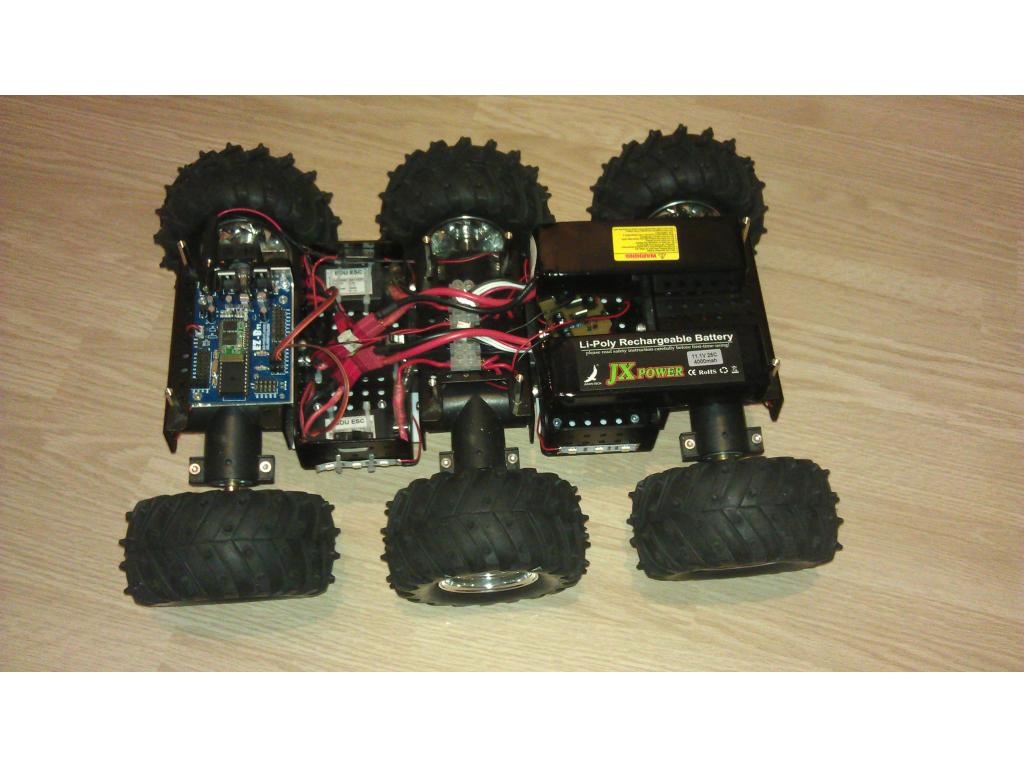
- 6x 6v 6A motors
- 2x 20A Rc Car ESCs
- 2x Reddragon 2s 25c 1200mAh
- Ofc the Ez- B
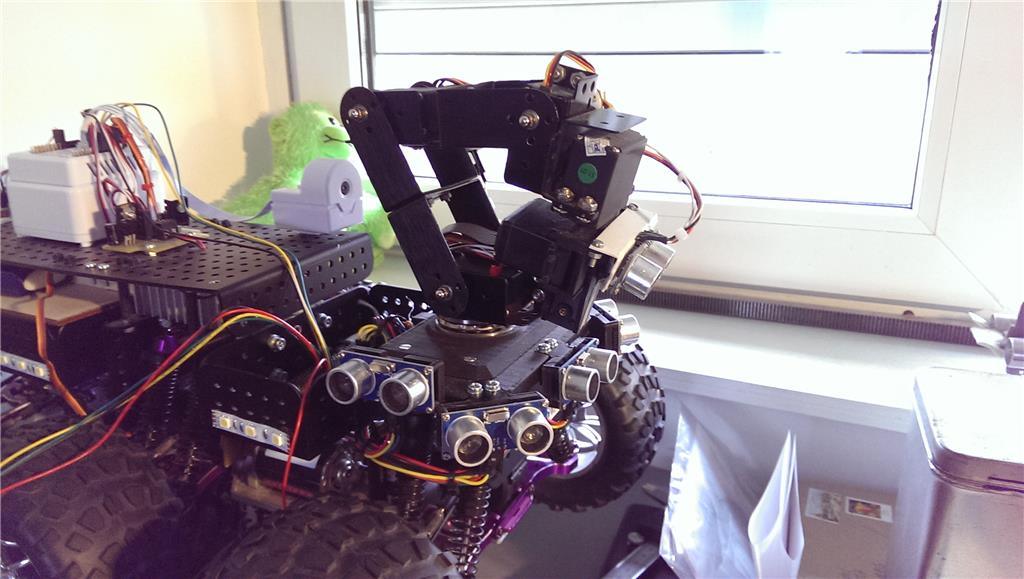
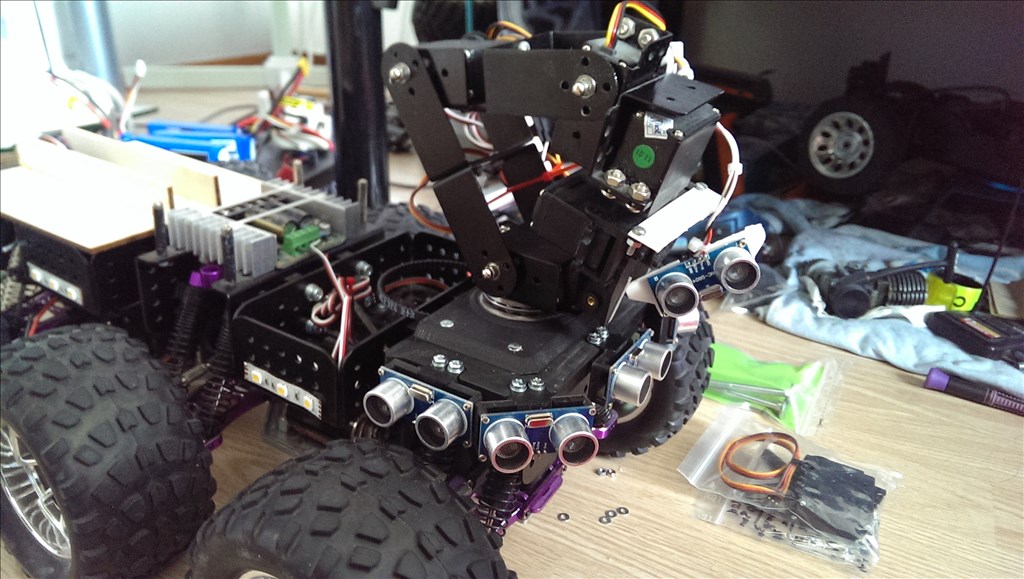
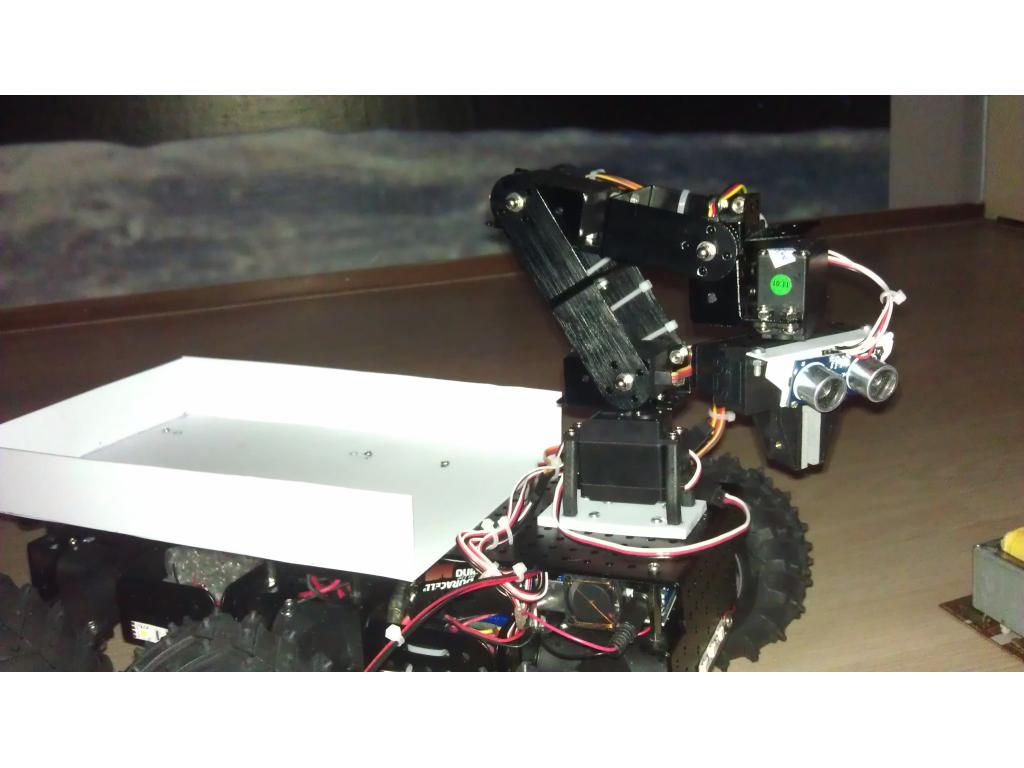
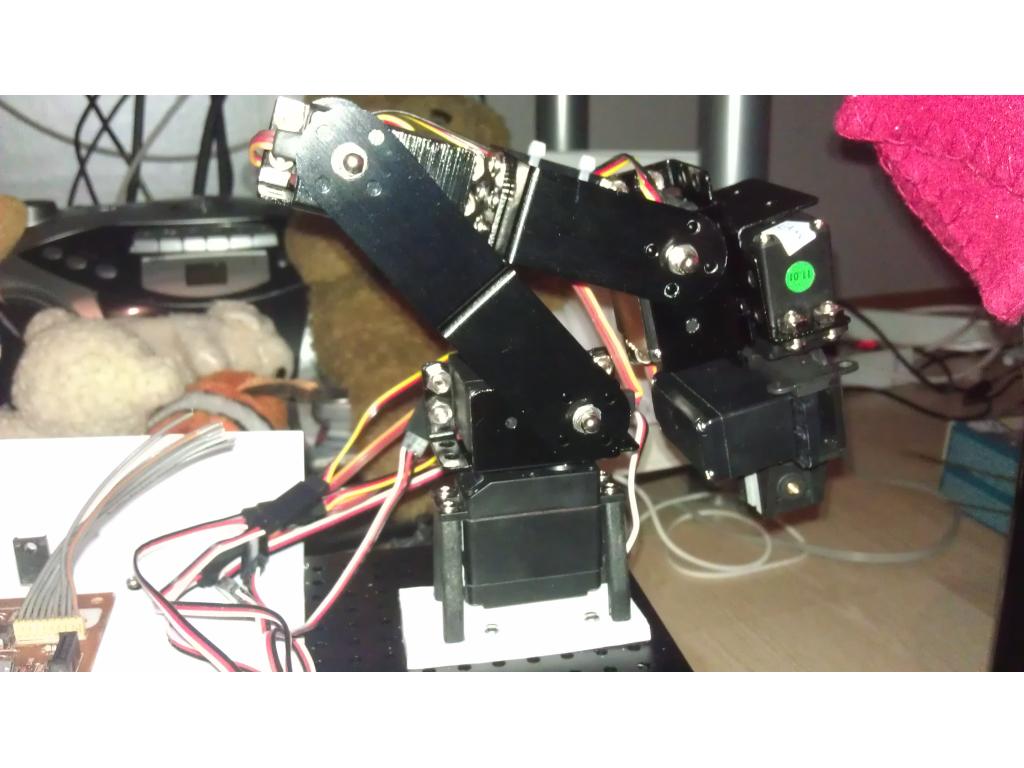
- Dfrobot 5dof robotic arm
- Asus Eee pc 900hd
- Ping sensor (well... I sort of broke it... It got stuck between the robot and the wall...)
Why I'm building it? Because I can, robots are Awsome, the EZ-B rules and I got tired of burning/shocking myself when I'm testing one of my "crazy" contraptions.
Up coming updates for robot:
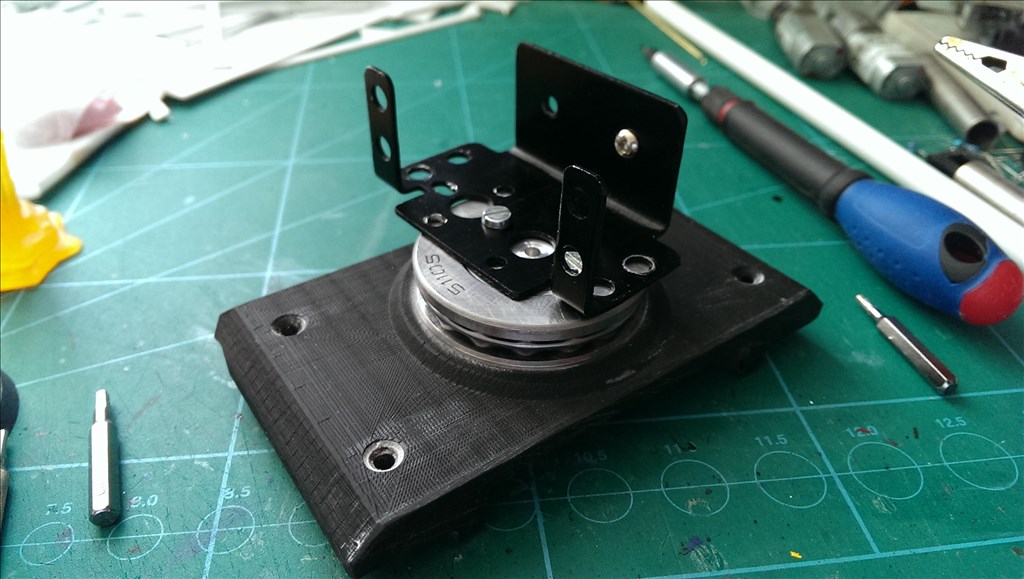
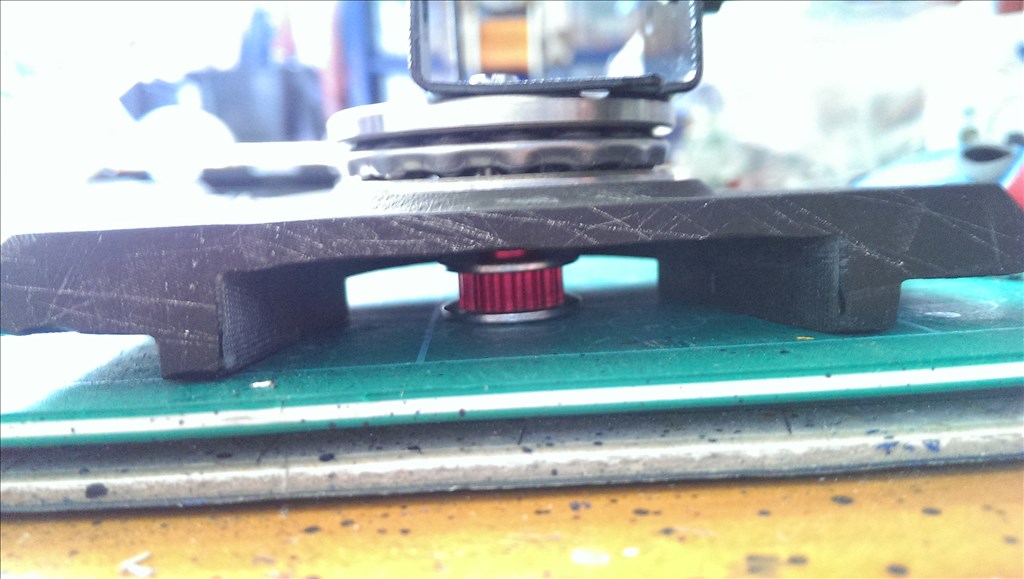
- A rotationplatform for the arm.
- 2 gigantic lipo batteries.
- camera+ pan/tilt turret.
- Small rockets
- mini mini-gun
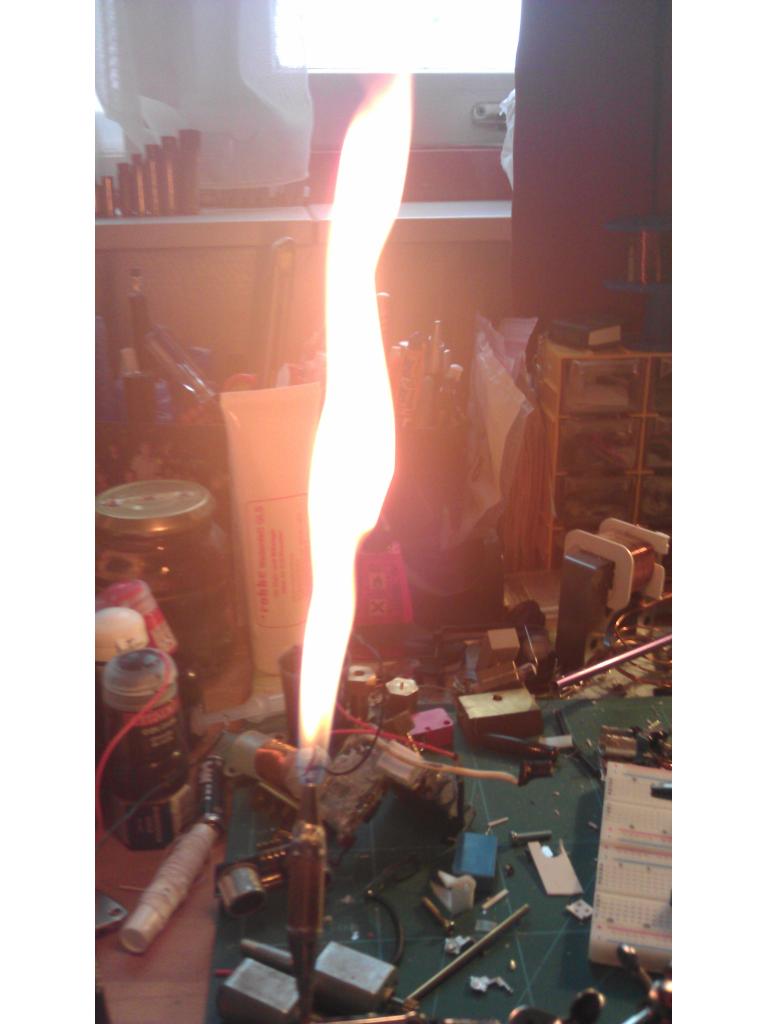
- Flamethrowler (a failed version of a liquid fueled rocket, but it's working if you call it something else)
- coilgun
- railgun
- Lots of other things I can come up with.
By budel0
— Last update
Discover more robots
Ezang's New Creation - Mr. Roman
New Arduino creation Mr. Roman features moving eyes and mouth, with more enhancements coming.
Morbeious's Alpha (Dev Servo Bot)
Dev Servo Bot using Ez-bit parts and recycled materials: CD-case caster, cable clip, hot-glued frame and sonar for...

Vertigo's Getting Started On My Inmoov Head
Control an InMoov head with EZ-B and Synthiam ARC: scripted person tracking, pause-and-compensate servo control,...

That is such a nice arm!
Thx
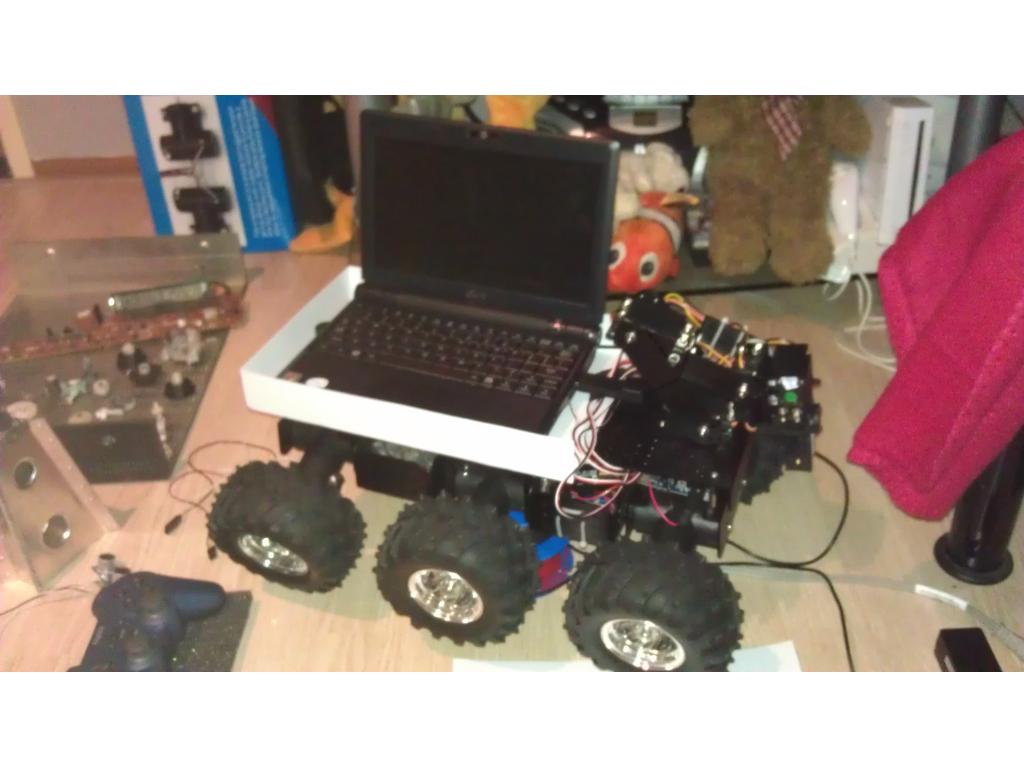
Update: It has been some time since my latested update... But I needed the time to rethink my robot as it was not going to work as planned. My initial idea was to add a laptop and use it as a link between another computer. But the total weight would get to heavy and it couldn't turn any more... So I'm switching to synapse, well as soon as I know what parts I need...
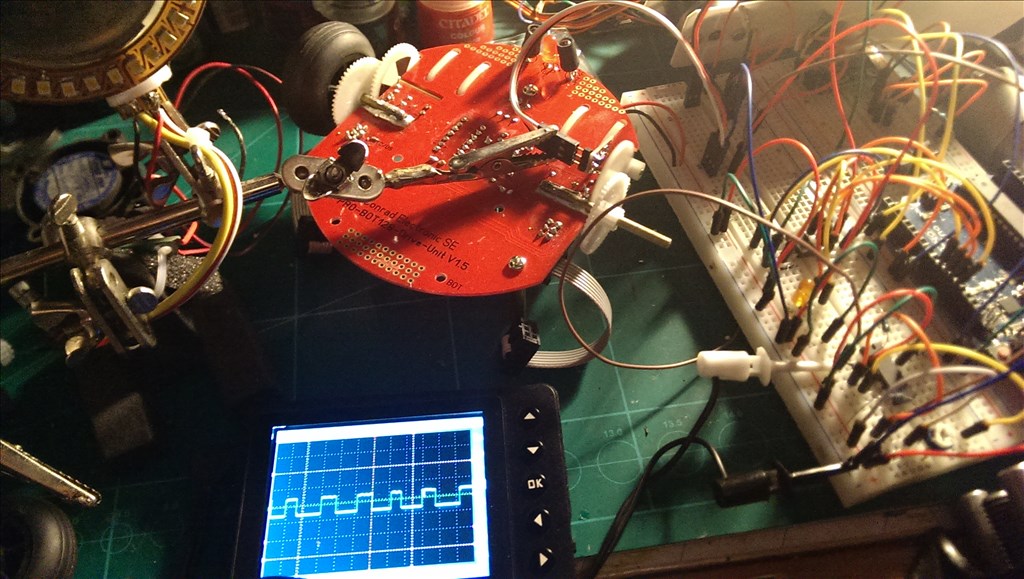
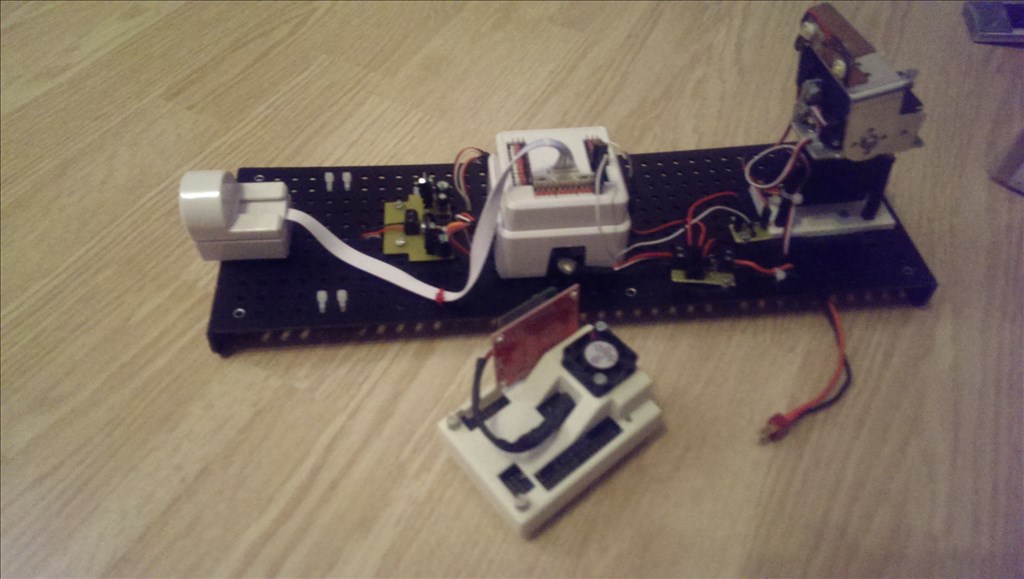
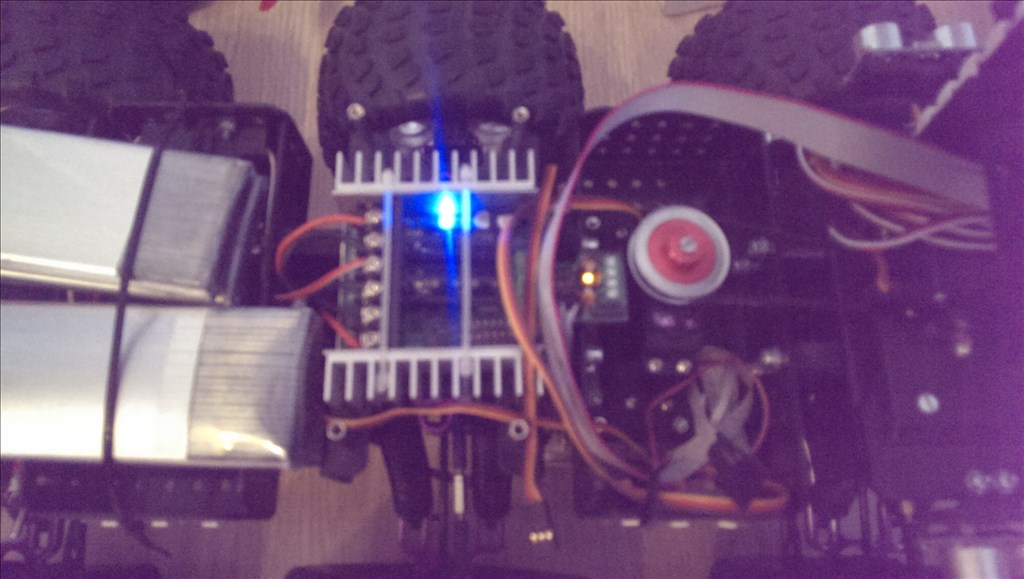
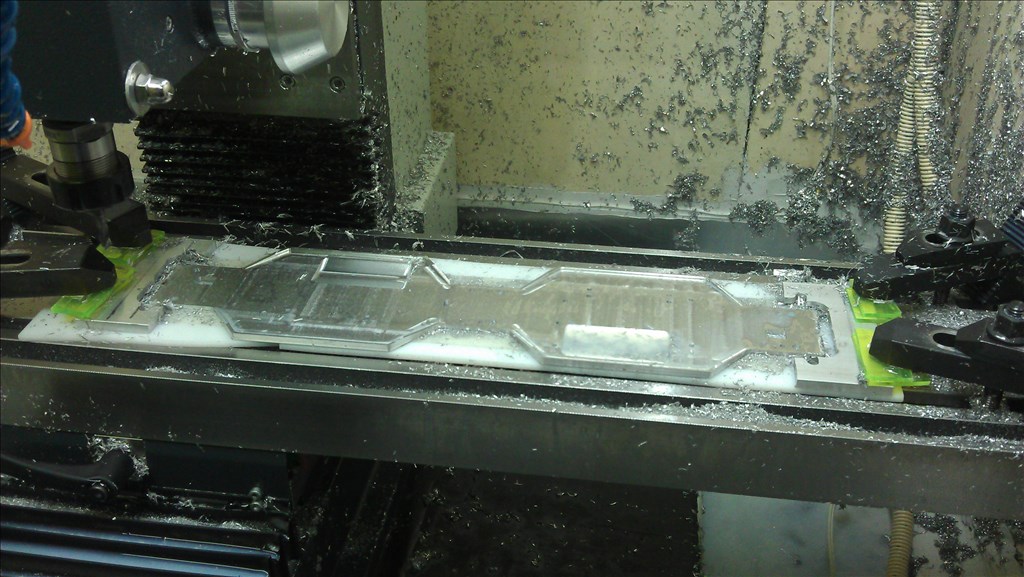
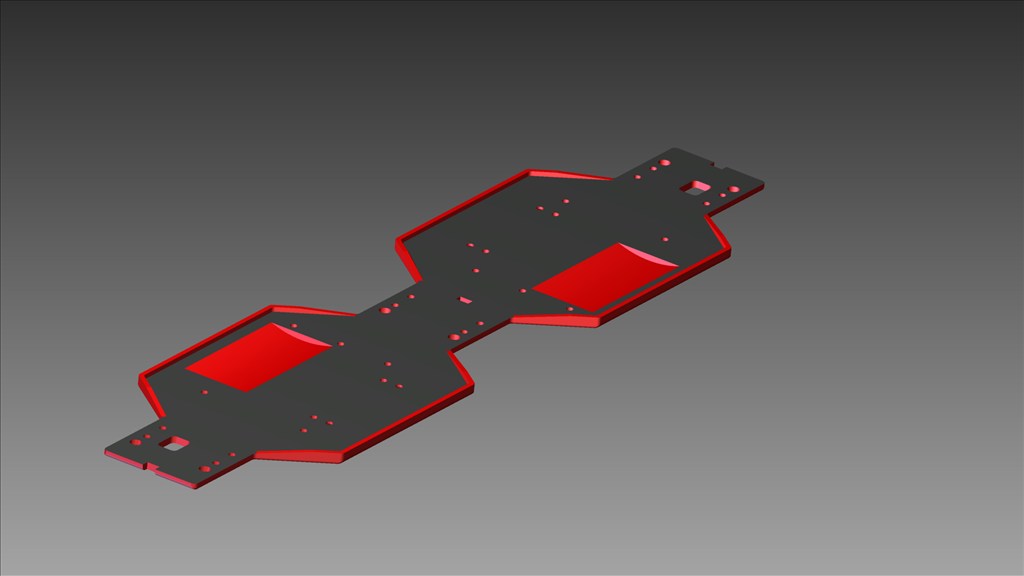
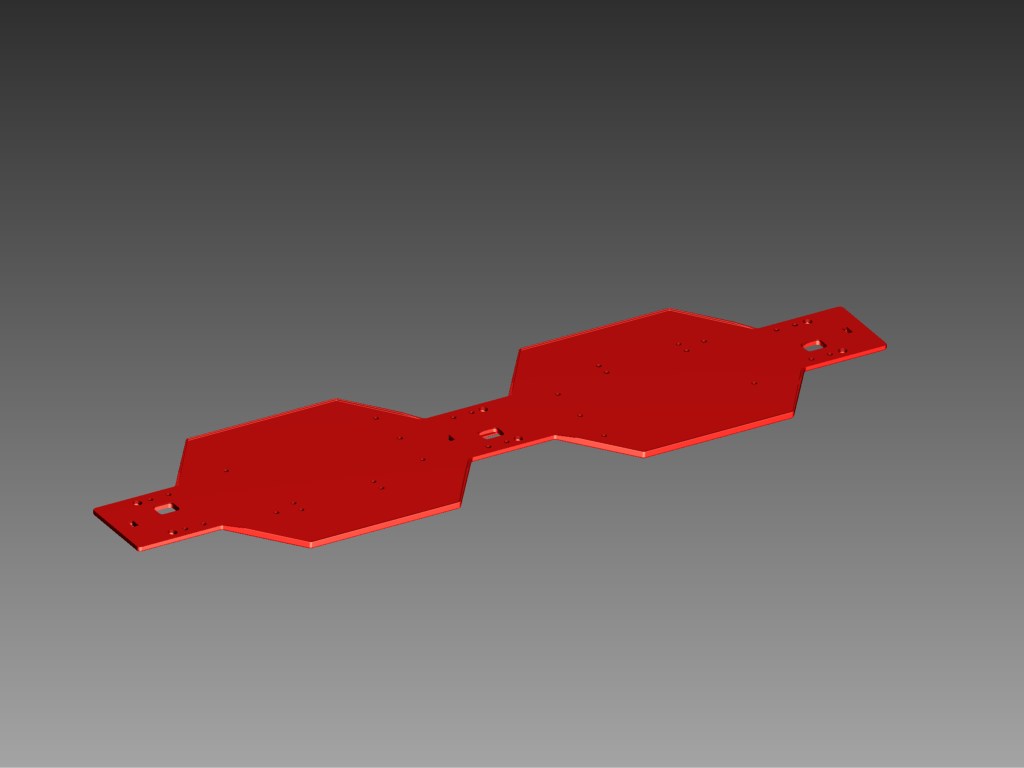
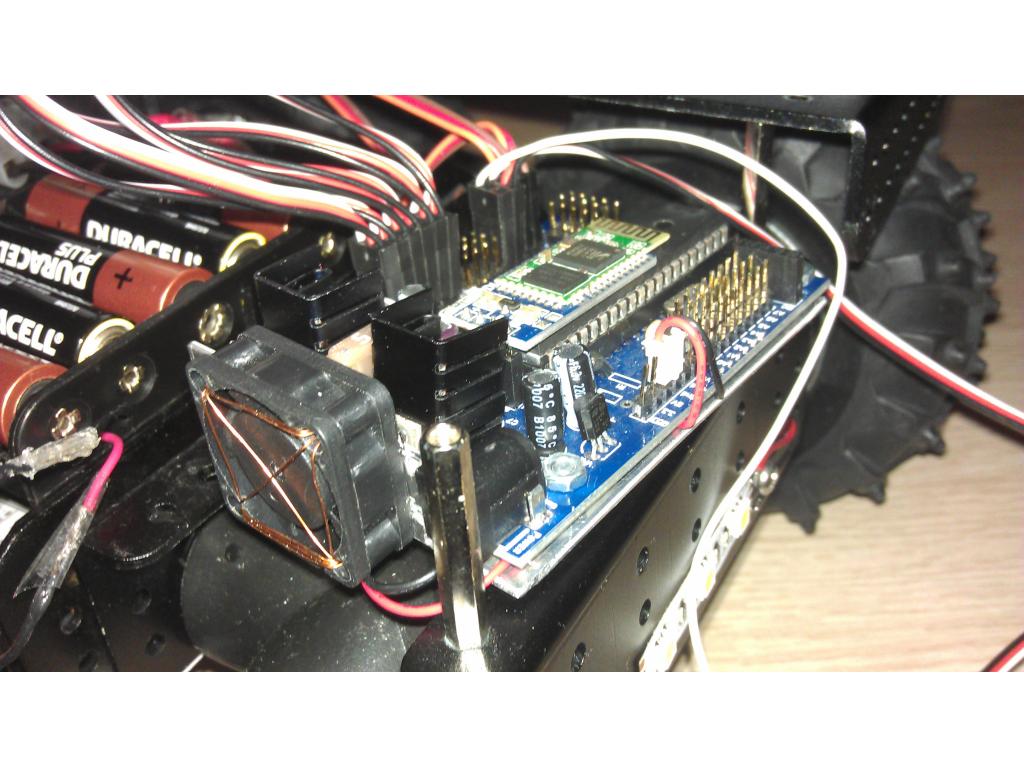
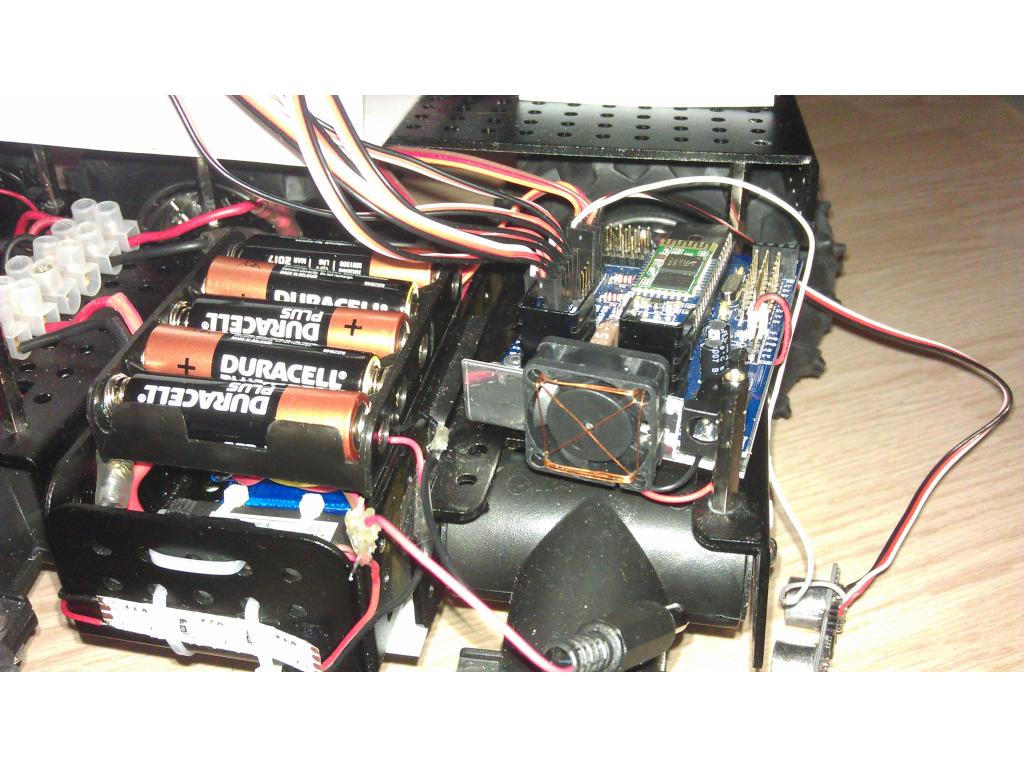
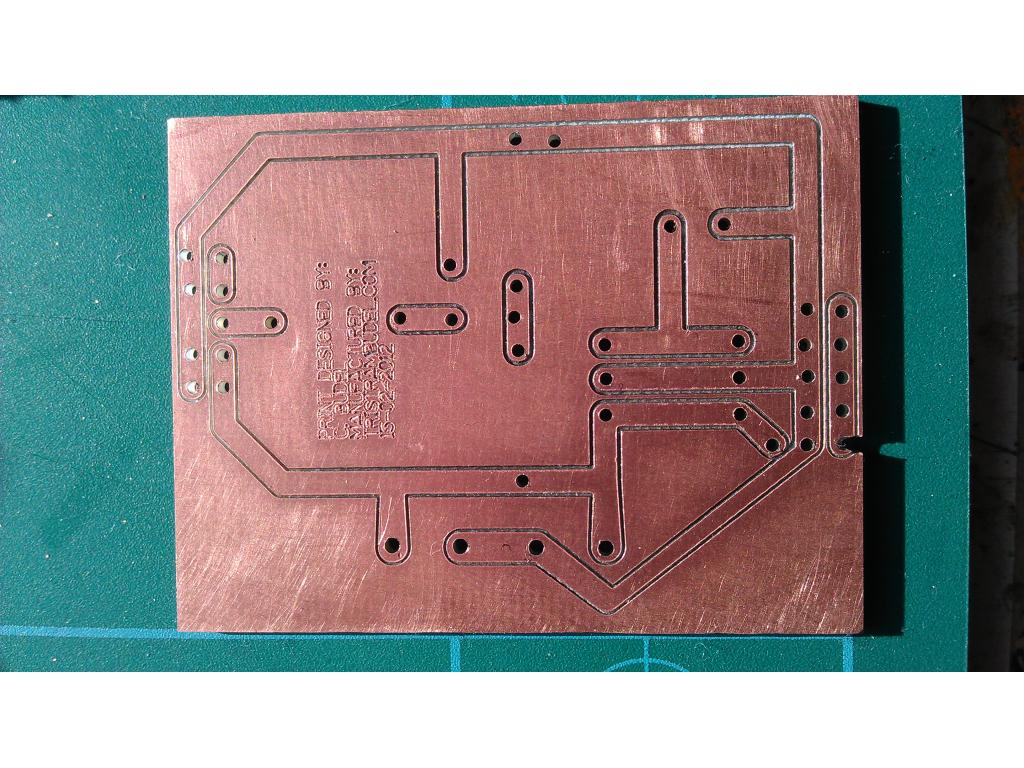
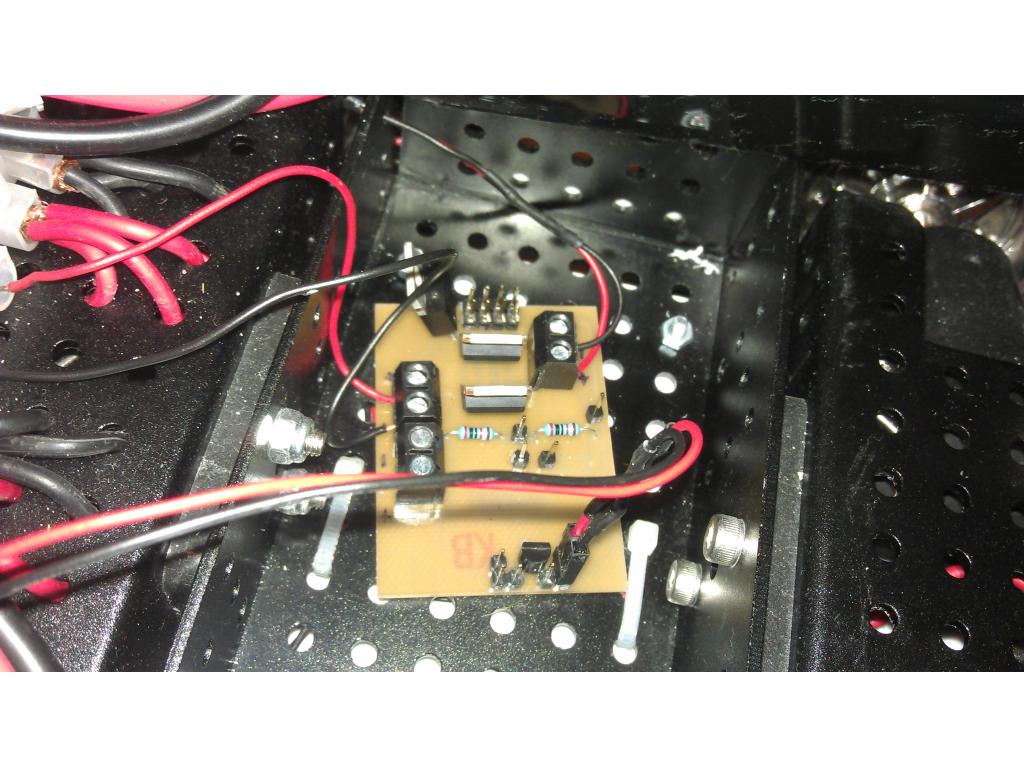
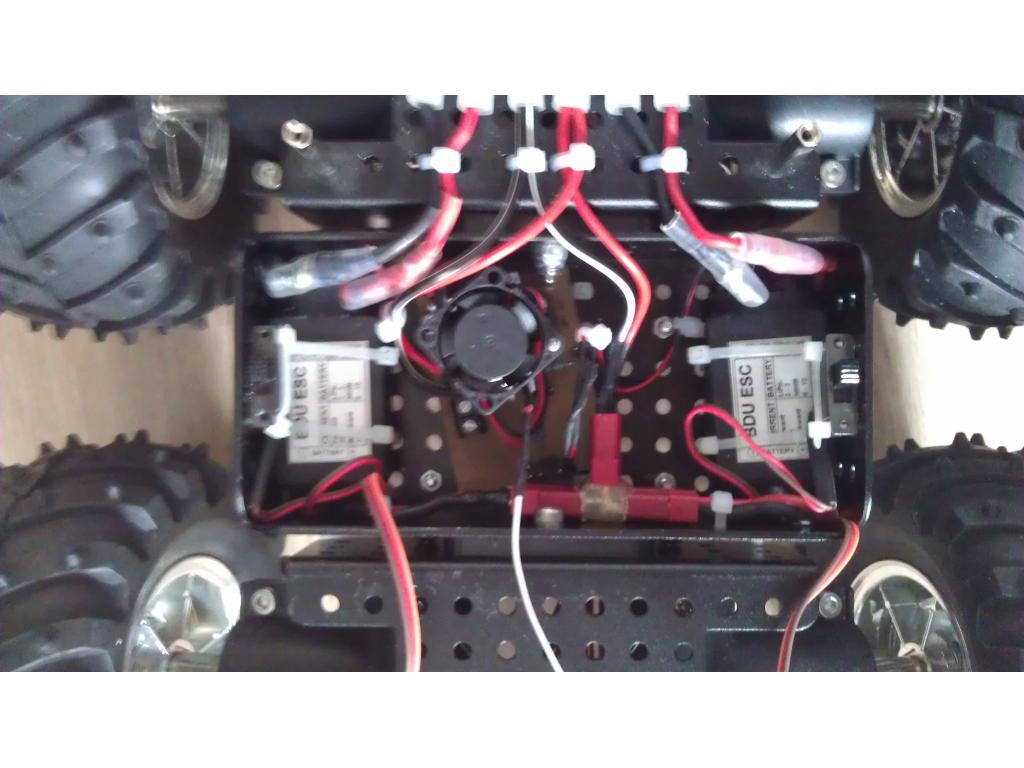
So the updated part... I finally finished my powerdistributionboard.
Now all things that require power will get power from only 2 batteries...
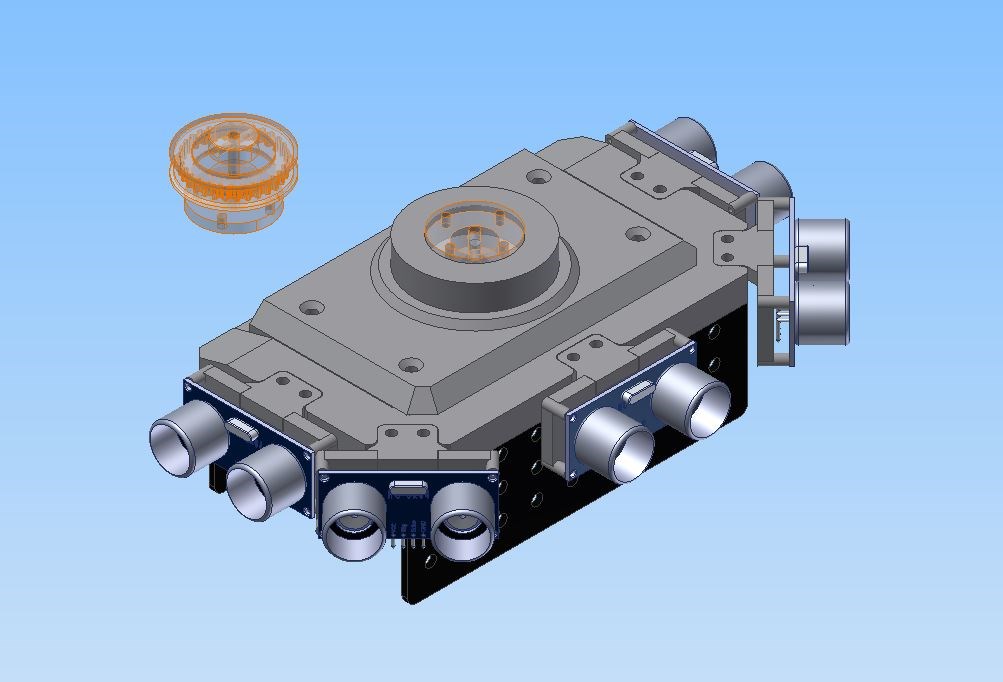
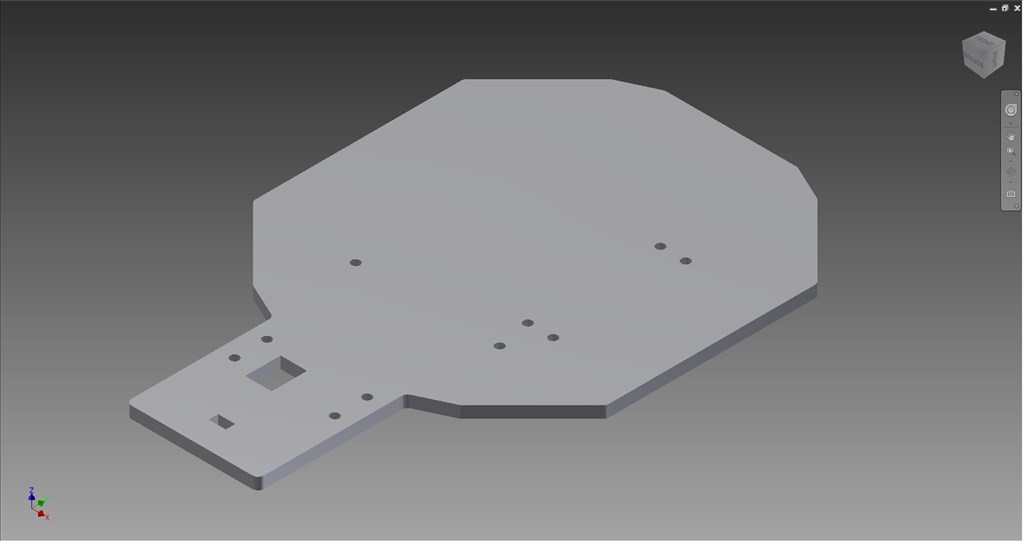
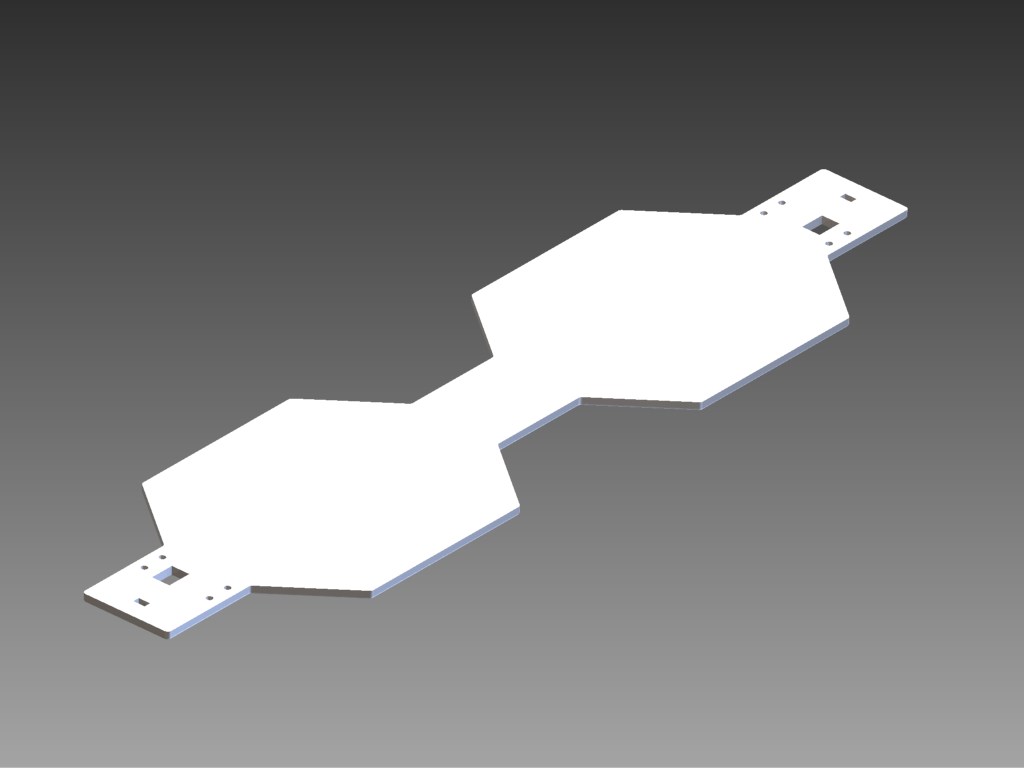
Next update: Redesign of the rotation platform for the arm.
It's an awesome bot. Love the lights for night..... :o)
I would love more info on the arm. Did you get the parts from a certain place or your design?
Samantha
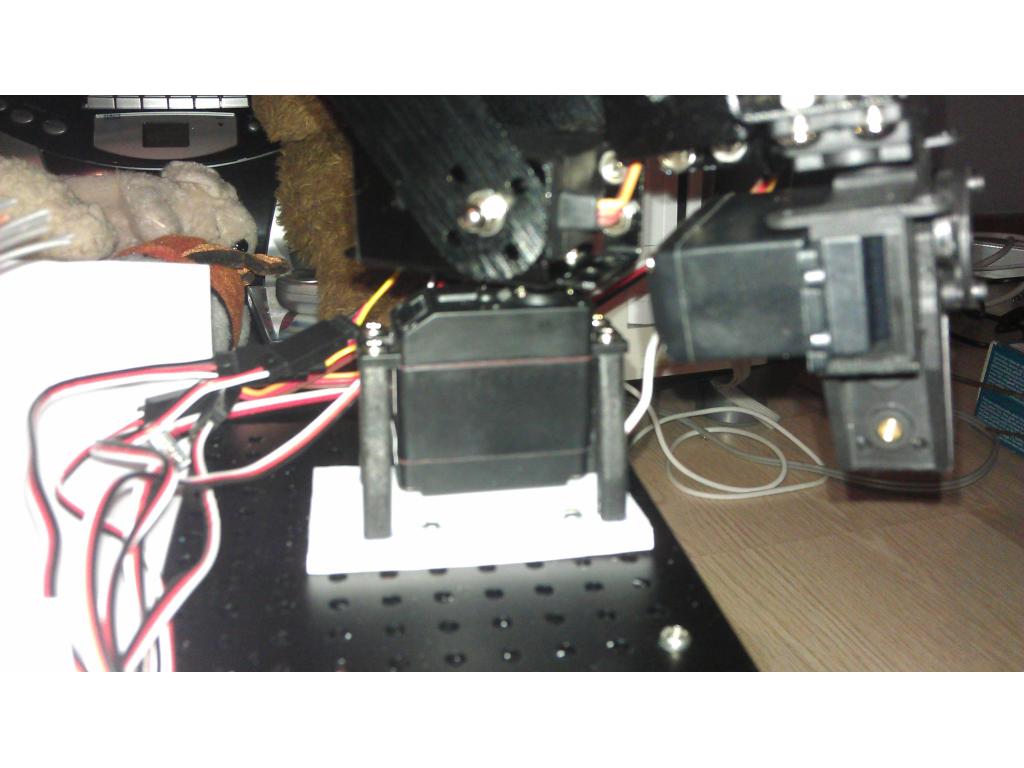
Hi Samantha, Thx for the complements! Some time ago I bought it from some guy of ebay and it actually is link ,but mine didn't have the rotation pad, I made that my self (still working on it, a better, smaller and stable version). But the entire arm is based on the brackets like link or similar brackets(more brackets).
In the kit I got 2x 15kg/cm servos, 2x 3.1kg/cm servos, 1x 3.5kg/cm and the brackets. (note: weight / cm is at 4.8v so with the ez-b's 5v it's a little bit more) I haven't tested how much it can lift, but it's fun to pick stuff up with it.
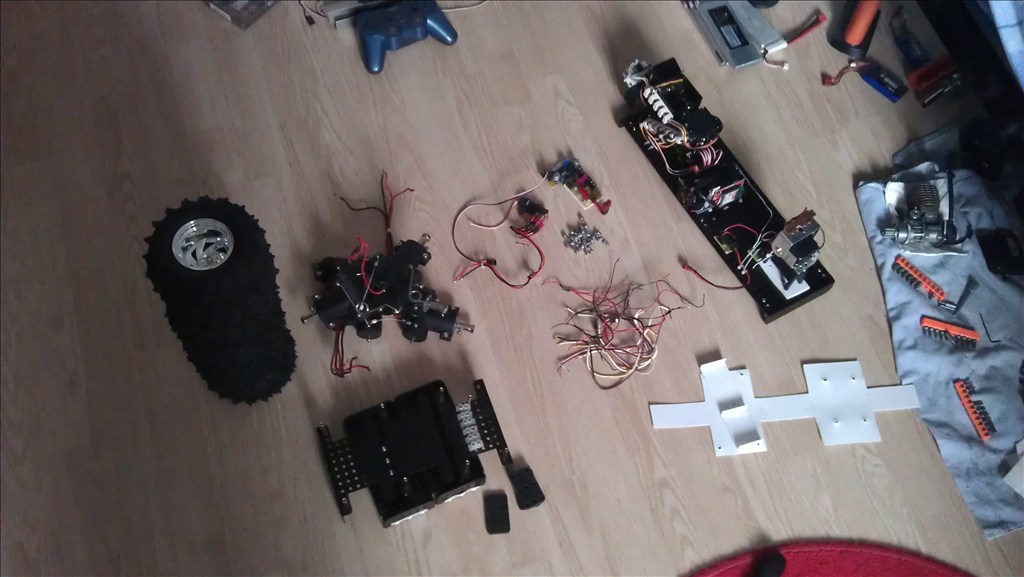
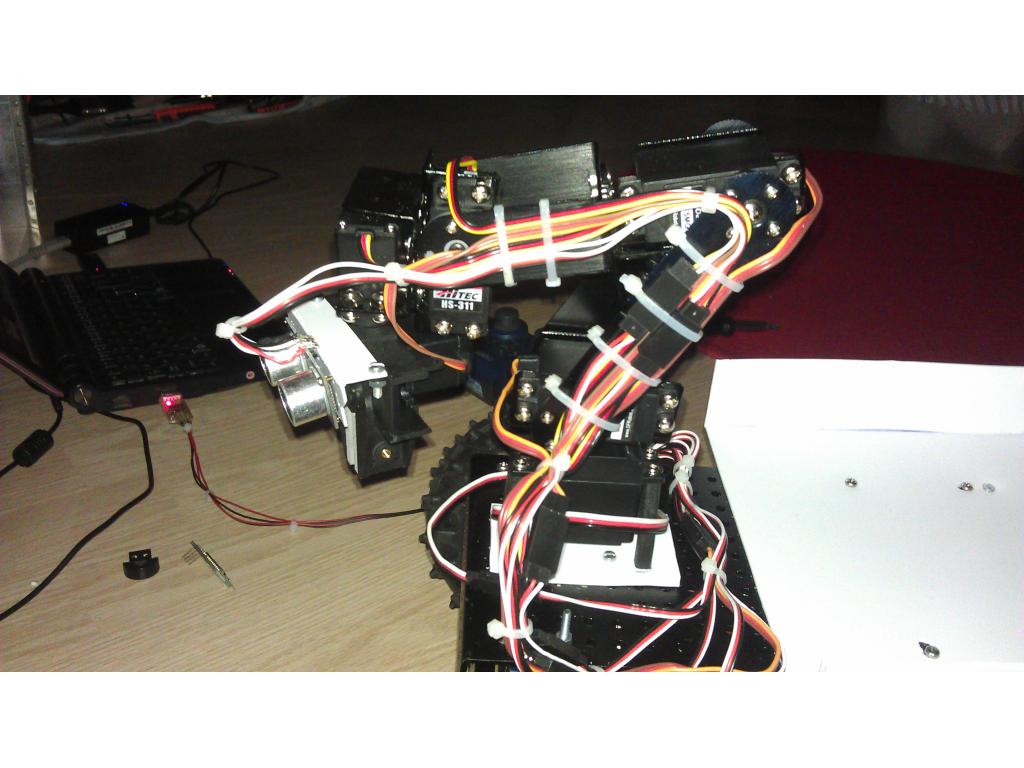
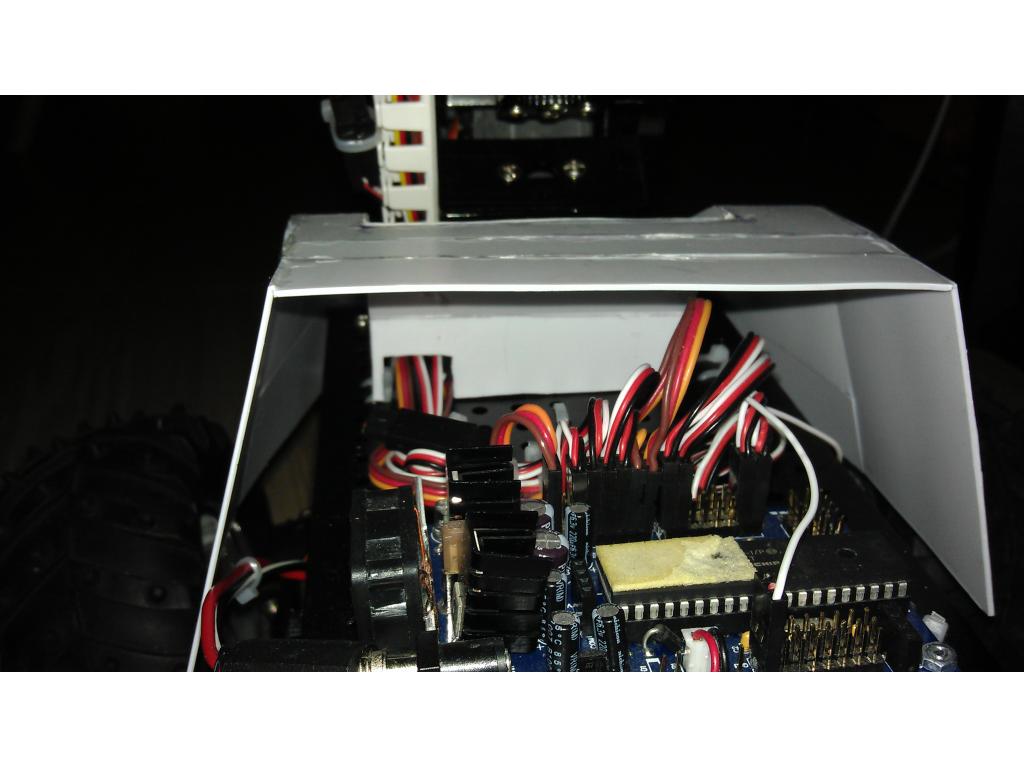
Rest of the robot: Have been working on the wiring on the inside of the robot, it used to be a mess... No I've tie wraped it all up , but more will come soon as I've been redesigning most of it!
, but more will come soon as I've been redesigning most of it!
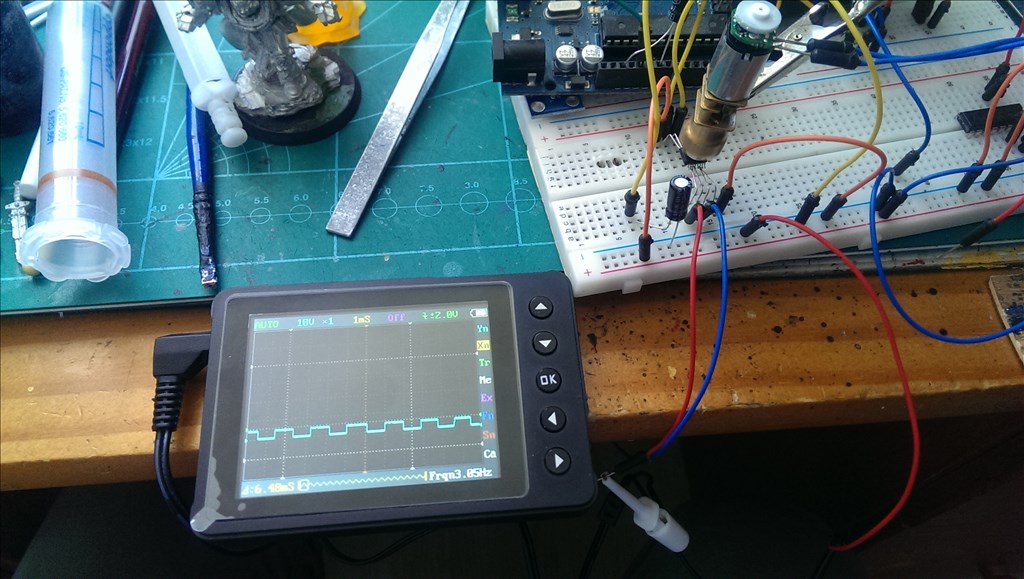
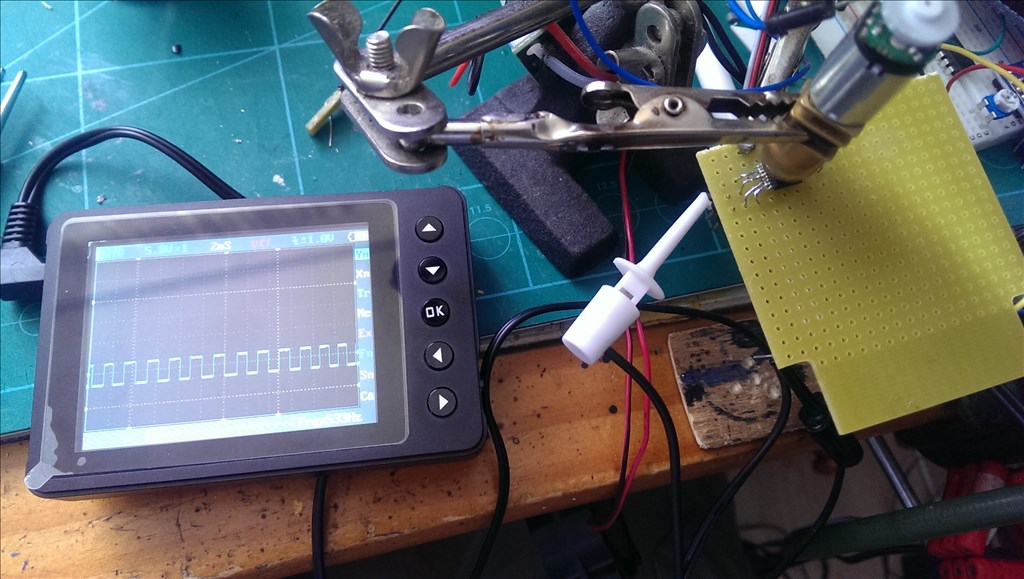
Small preview: It has to do something with fire and it actually freezes it self when you use it.
Oh I can't wait. Really awesome job u did first time. Can't wait to see ver 2.0
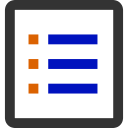
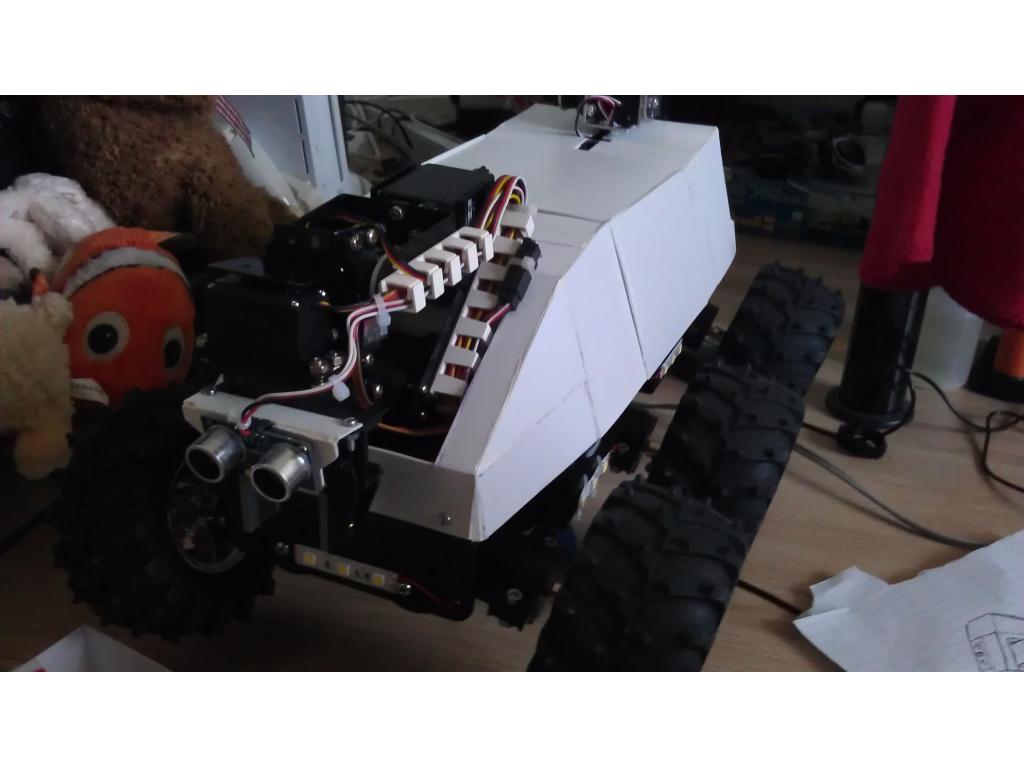
Behoor my latest update: A few months ago I tested the principle of my robot, the idea was for it to carry a netbook around. Here comes the problem. Wasn't able to turn anymore... So I removed the netbook ,but I stil wanted range, so I bought a synapse kit which gives my robot a line of sight range of 4.8km (about 3 miles).

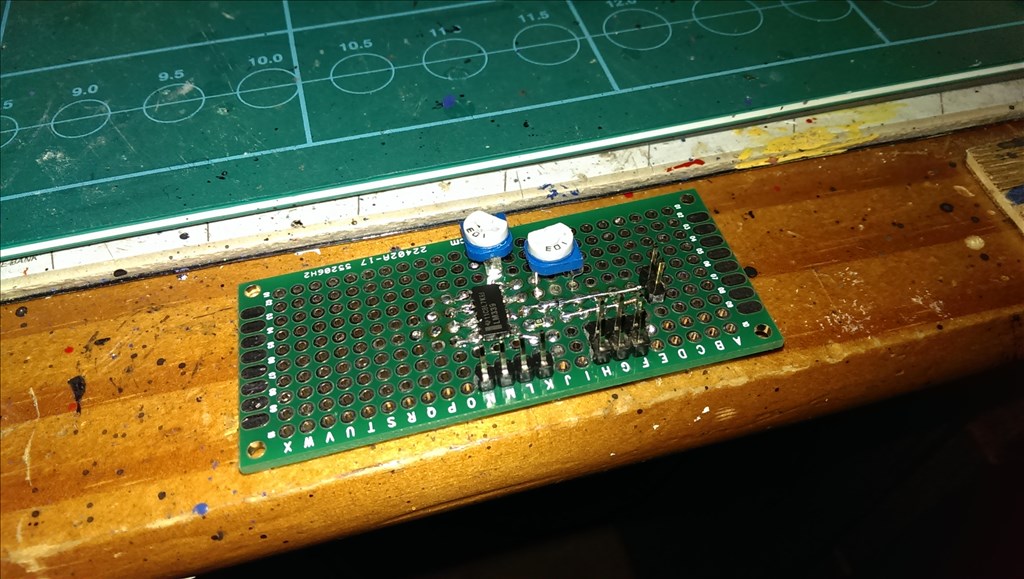
This module plugs right in where the BT-module sits. Another module will be connected to a pc. I have to say that the connection is great. I could walk around my house and not lose connection.Once my range problem was fixed I started to create some order to the wiring mess. It's afterall quite important to have them bundled nicely as crossing wires can create fires. Like the wires going from my batteries to my ESCs, those have a 40amp current over them.
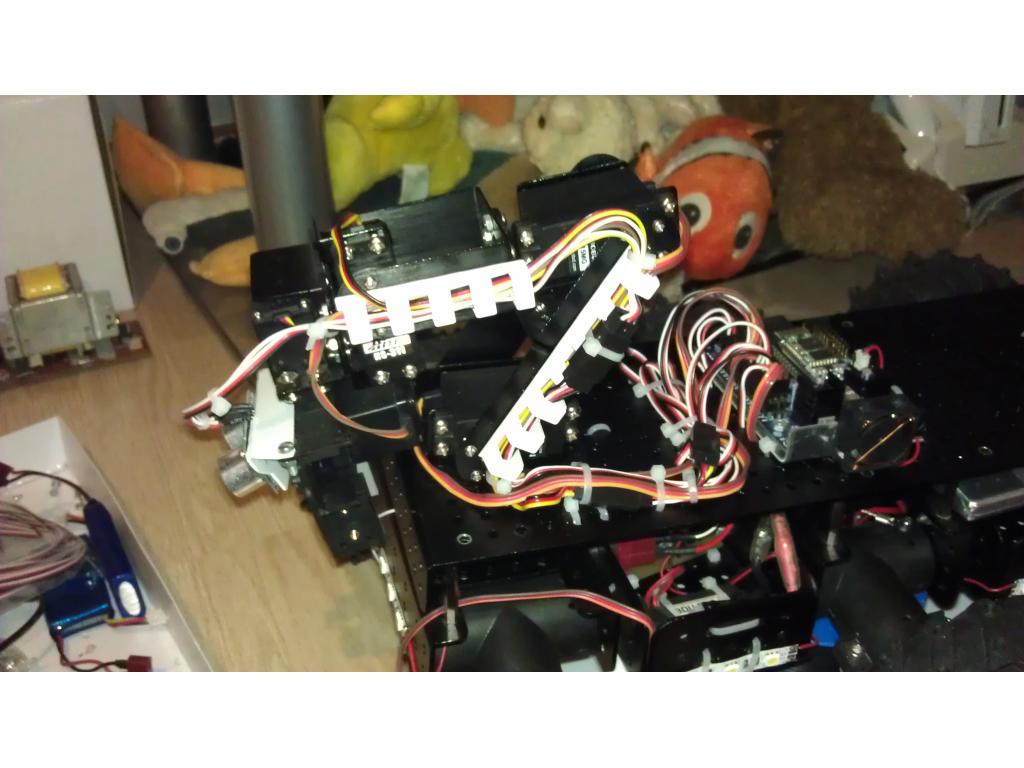
Also I made some changes to the arm, as it was way to high and the rotationpad wasn't working as planned so I changed it.
I added a few wire guides and removed the rotation pad.
That's great.
I am having a bluetooth issue. I can't even really drive my dude around. My computer is in bedroom, with carpet. I thought I'd get a better range but as soon as he leaves the room he loses bluetooth connection and either just stops or runs away. He doesn't get very far though. he's top heavy and as soon as he hits more carpet. Plop....