



Hey,
here´s my first robot-project.
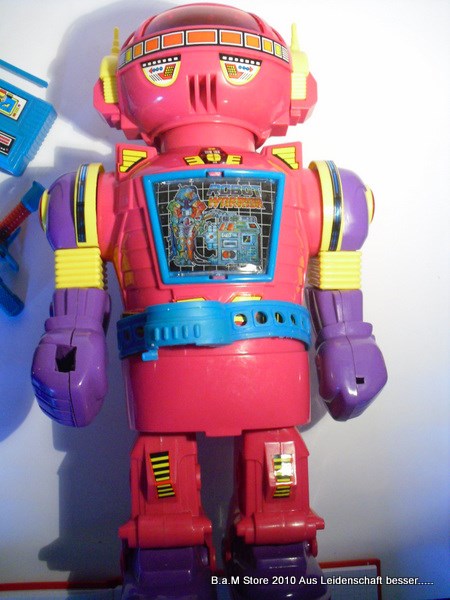
I proudly present "MARVIN" tadaa
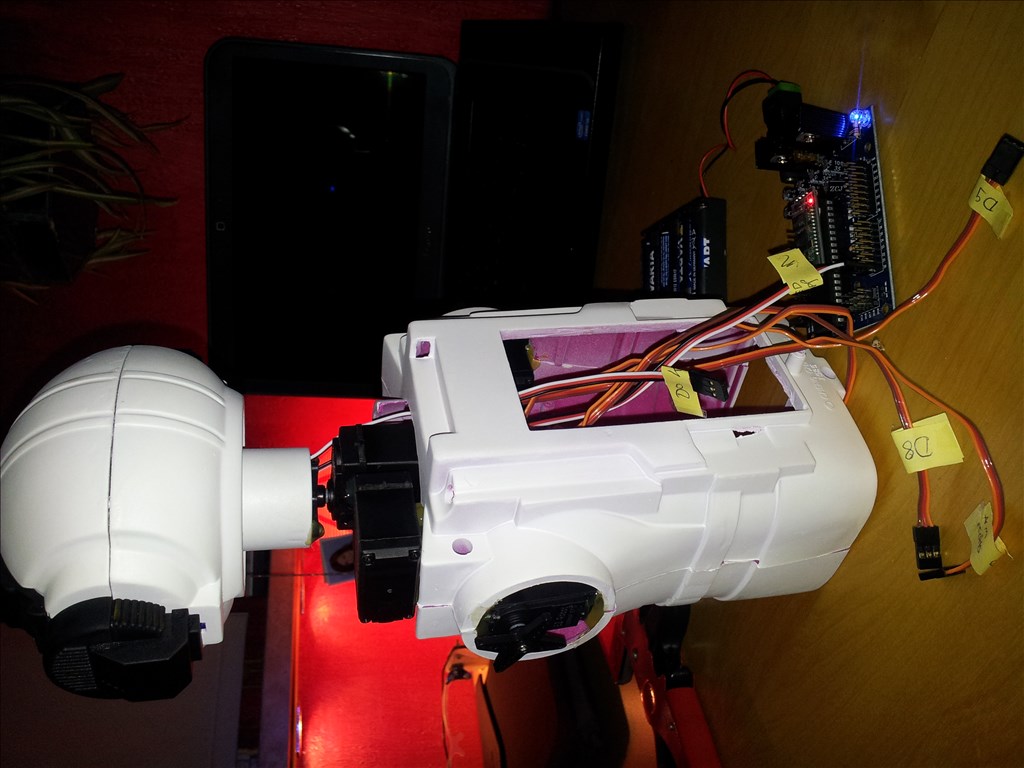
As you can see, I´m still working on it ...
the camera is modified to be powered by USB and at least the head is moving
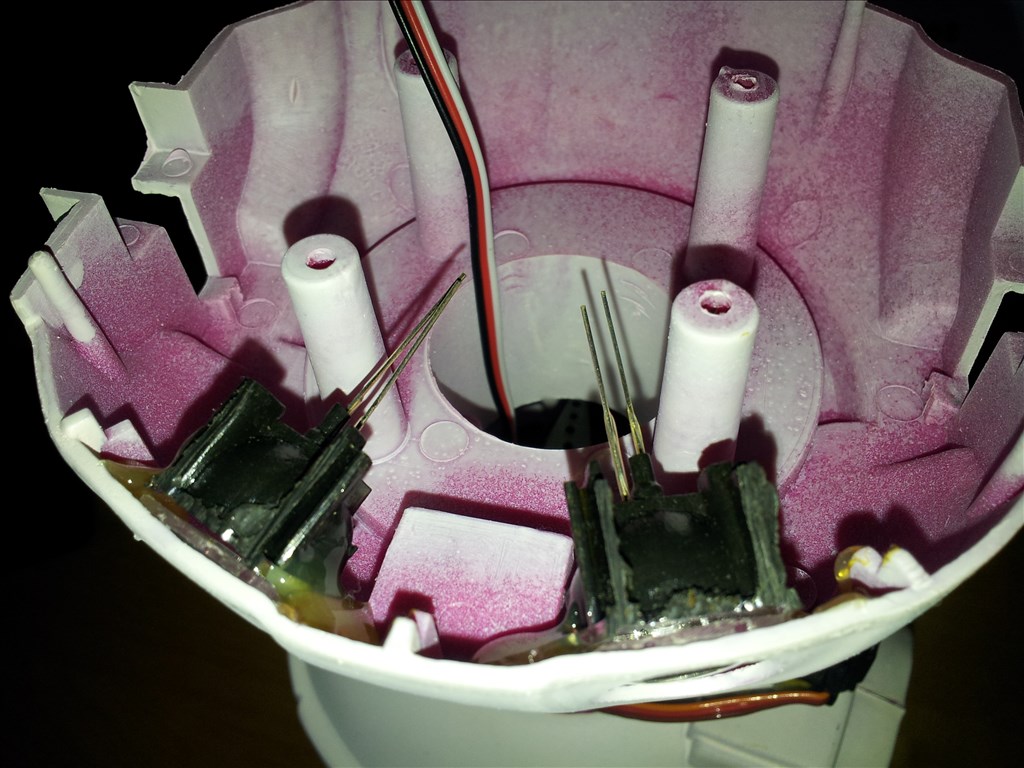
The hand is built out of a OWI-robot-arm and connected with a servo. Next step will be the arms. Until now I´m not sure which feet it will get.
Greetings from the bavarian-wood.
PS: sorry for my bad english tired




-635047039990625000.jpg)


By HablijacK
— Last update
Discover more robots
Nekoeccentric's Dr.Who's Nsd Dalek
Robot build with working drive system and ongoing fabrication; EZ-B audio stopped working before a weekend event.
Pirumpi's Ez-B, I Would Like You To Meet Nodejs
Control EZ-B robots from web and phone using a Node.js module via Synthiam ARC TCP interface with jQueryMobile and...

Ezang's New Mr. Metal Robot 2020
Build Mr. Metal robot with Synthiam ARC using EZb4 controller, EZrobot 1300 camera, four EZ 360 HDD servos, Servo City...

Your Marvin robot looks awersome if you are still in the process of building Marvin keep up the awersome work



Here we go,
long time ago, in bavaria far far away ... Marvin has to wait for a long time, but now i can continue my work.
Shoulders were mounted provisorily to test the functionality and the look. A rover base completes the black and white look (looks like i have to raise the body a bit so that the proportion of the body and the rover fit each other)
The battery pack was mounted in the black jet-pack on the backside.
Here is a small video of his previous functions:
I love the Rover 5 base by DAGU
It gives it a awesome look.
That is a delightful robot. Keep up the good work.
:D