




























































































































Now I have the EZ-B kit and the Hearoid it's time to start my Showcase thread.
I still haven't decided on a name for him yet, all suggestions are welcome.
I won this robot on ebay weeks ago, for the past 2 weeks he has been waiting for me to collect him...

Today was the day, a road trip to pick him up and bring him back to his new home...

In his new home (with Omnibot and Wall-e in the background totally unaware they are next in line to be opened up)

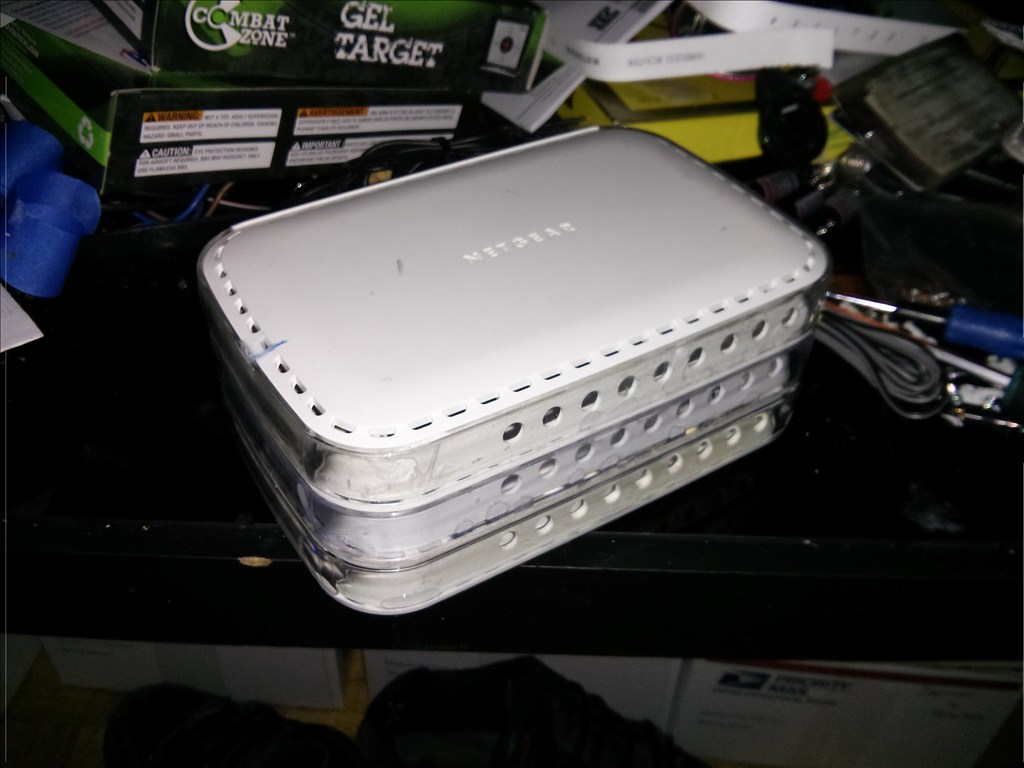
It wasn't long before this happened...

Now waiting to go in the dishwasher to get nice and clean.
The plan is to make him autonomous, running 24/7 (except for when he knows to go charge himself up) but will also be adding in the various image tracking options.
The only other slight modifications to be made to him are to convert the head to tilt & pan which will involve having to give him a small neck.
The head will include the camera. I haven't yet decided to fit it in one of his eyes or to make it his nose. The issue to overcome with this is the blue tint on the bubble head. The mouth will have a light or some lights in which flicker when he speaks.
The arms will be given some life with servos at the shoulder joints and the elbows provided I can get them to fit in there nicely.
Ultrasonic sensor will be in his chest, probably on a servo to give a wider view.
Original drive wheels and gearbox seem to be in very good shape so will plan to reuse those and just replace the existing motors for the modified servos if they can manage the task.
Speaker and microphone will be in the original positions - if it's not broke why fix it?
Not too big a project but enough to give me a test, help me learn and bring an old robot back to life.
Discover more robots

Nolan's Nolan's First Robot

Deuel18's Oculus Rift Is Out, Any Ideas?

Right then, so after messing with the original Hearoid/Omnibot drive trying to figure a way to run it with modified servos I gave up, it'll be easier to use the existing motors as they work perfectly fine.
But, how would you guys suggest going about this? Is the TB6612FNG H-Bridge the best option?
That little controller looks OK to me, a little more hands on with soldering (not a bad thing for some ) but a good price and newer, more efficient tech then the L298N based 2.5A. I would slap a heat sink on it even if it seems already rated higher without then the L298N with.
) but a good price and newer, more efficient tech then the L298N based 2.5A. I would slap a heat sink on it even if it seems already rated higher without then the L298N with.
If you are OK with modding the face dome, I would consider drilling a small hole front and center for the camera lens to peek out of (also allows easy focus adjustment if ever necessary). Remove the cameras shell and set up the rest of the head space for the EZ-B and whatnot. Their visible circuitry, LED's blinking and such behind the blue tint would look like the brain it is @Josh did a great mod making a mounting deck under the dome on his Squeegee bot that might work for you as well.
@Josh did a great mod making a mounting deck under the dome on his Squeegee bot that might work for you as well.
Soldering is not an issue for me, I prefer not to have to do it but I can do it very well - if my iron works like it should unlike yesterday (but that's because the tip is dirty and oxidised and I have no more cleaner left).
To be honest, I'd rather not drill through the dome. Ideally, although perhaps not realistically, I'd like everything like the camera, servos etc. to appear totally hidden on a quick glance but we will see what happens (the elbow servos will be the biggest challenge there). The possibility of swapping the blue for a clear dome is one which is very appealing but that all depends on availability, cost etc. - I've already spent far too much this weekend and I've barely started...
If the clear dome doesn't work out then he still looks pretty cool without the dome fitted, in fact it shows his face off a lot better without the dome and I'm starting to like that look a lot.
Heh, the expense never ends does it I like the idea of your stealth approach... and probably would have realized your goal if I had red your posts over again before offering an idea blush Actually I think a good stealth method shows a much higher degree of skill and planning anyhow... almost an art
I like the idea of your stealth approach... and probably would have realized your goal if I had red your posts over again before offering an idea blush Actually I think a good stealth method shows a much higher degree of skill and planning anyhow... almost an art
A quick update while I am on here...
Currently I'm battling to get the head to pan and tilt. My pan/tilt bracket I bought wasn't up to the job of lifting his head at all, it wouldn't even hold his head. So I guess mini servos are out of the question. Just ordered a heavy duty bracket and servos but it's a bit bigger which will pose an issue when it comes to hiding it (I have ideas though but any others would be appreciated).
Still waiting for my servo extension cables to turn up, I have 2 lots on order from 2 different places and still none have shown up which means I can't wire the H-Bridge and get the base all wired up and ready to go.
So at the moment, it's still in bits and looks like I have made no progress at all, which kinda kills the motivation. Although I have planned everything, cleaned it, currently waiting for the fibre glass to set where holes have been filled... the boring prep stuff - I just want something that moves now though!..
ust a few images of his head now it's got the new "nose" camera and been relamped... Tempted to leave the bubble mask off now (thoughts?)
The mouth light may change. If nothing else it will be activated when the robot speaks but tempted to change it to a chasing strip of red leds (like KITT's scanner)
Eyes are bright white, reason being my house is dark at the best of times so he needs to light up where he is looking with the camera, this seems to do it very well.
I kinda like that look without the bubble.
Finally got the batteries decided upon for this project now, 2 x 6V 12Ah sealed lead acids should do the trick and hopefully fit nicely in the base.
Also have the head all fixed up (short of bubble mask, which I'm almost certain wont be fitted) and the bottom of it fibre glassed and filled to make a good base for the pan/tilt bracket I'm waiting on.
The base of the neck is also all fibre glassed up waiting for the bracket, it's going to be a challenge fitting a strong enough pan/tilt bracket & servos in as I don't want it to have a huge neck but hopefully the bracket can be shortened if needed (or more likely half of it shoved up inside the head).
Was working on the arms last night but didn't have the guts to start cutting out for the servos yet. In teh process of making some mock ups for the arm joints out of thick card, EVA foam, PVA & fibre glass, so far they look like I could use them as the finished part but we will see once it's dried and fitted etc. I assume the standard servos in the EZ-Kit are strong enough to lift an Omnibot arm?
Also put the hands back together... I didn't note how they come apart so that was one hell of a puzzle, thank god for the old robots site and the Omnibot Companion guide!..
Still waiting on a bunch of parts and still trying to find a cheap enough Omnibot that I can use the battery panel cover from as the Hearoid has the Omni 2000 version with the extension ports which I've removed.
Getting there slowly, slower than I had hoped to be honest but it'll get there.