

































































cE9s4PsOgeBQIORwjd5!~~60_1-634818020230156250.jpg)







































































































BO)Lupuc4g~~60_35-634706297915000000.jpg)
LupbT6!~~60_35-634706298769375000.jpg)





C5j!~~60_35-634655044863125000.jpg)
















C5j!~~60_35-634659603510781250.jpg)


































C5j!~~60_35-634651704046230469.jpg)






















































































































































































































































































































































































































































































































































This project has evolved some , the basic rundown is I'm modding two Omnibots , one a regular the other a larger 2000 model. I will have two ezb kits , rad base idea was thrown out because of so much noise but could go back on the table if the omnibot drivetrain is too weak to pull it.





By jstarne1
— Last update
Discover more robots

Wolfie's Scraps
Custom electronics project assembled from many parts, progress photos show intricate wiring and assembly; more parts and...

JT's Jts Robie Sr.
Restoring a Robie SR for EZ-B-ification: raising height ~6 in, adding a turning/tilting neck, new paint, learning...
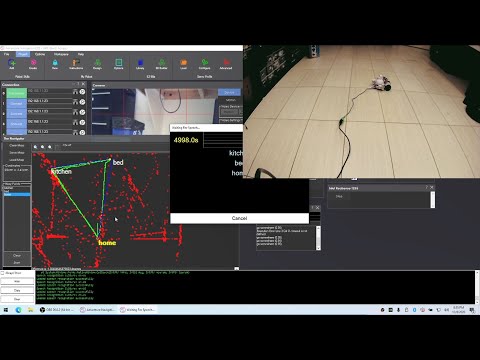
DJ's Intel Realsense T265 Adventures-Bot Part 3
Localize an EZ-Robot AdventureBot with Intel RealSense T265 and Synthiam ARC NMS, waypoint navigation, SLAM prep, lidar...

Or you could have EZB in upper half and one in lower half. Then divide ports between upper torso things and lower torso things
That's a idea too , well see once he is back from paint lol
that whats best part i see on EZB easy to make codes
Well hopefully Jarvis will be at least 99% where you want it before paint. Im sure touch up paint wont look quite the same.
Touch up paint is the 8th deadly sin lol , yeah the goal is zero cuts on any visible parts once painted.
Of course eventually you will want to make changes at some point. I love seeing the progress on the beast! Geez I really should get to work on mine.
will need to check on your been awhile,so far looking good glickclik
Thank you. I will post more in a day or two. Ive got a day off coming. :/