
































































cE9s4PsOgeBQIORwjd5!~~60_1-634818020230156250.jpg)







































































































BO)Lupuc4g~~60_35-634706297915000000.jpg)
LupbT6!~~60_35-634706298769375000.jpg)





C5j!~~60_35-634655044863125000.jpg)
















C5j!~~60_35-634659603510781250.jpg)


































C5j!~~60_35-634651704046230469.jpg)






















































































































































































































































































































































































































































































































































This project has evolved some , the basic rundown is I'm modding two Omnibots , one a regular the other a larger 2000 model. I will have two ezb kits , rad base idea was thrown out because of so much noise but could go back on the table if the omnibot drivetrain is too weak to pull it.





By jstarne1
— Last update
Discover more robots

Nolan's Nolan's First Robot
Customize a Gravity robot using cardboard and foam skins, script behaviors with a loTiny EZ Robot controller, continuous...
Jp15sil24's Samantha
Synthiam ARC powers Samantha, a humanoid robot with Python voice control, servo movement, sensors, face tracking, and...

J's My New Toy I'm Building
Power Wheels converted with a paintball turret on bike forks, actuator for vertical control, drive speed controller and...


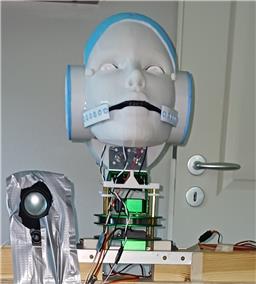
Ok while waiting on fiberglass to cure I measured the neck piece to cut a servo/neck mounting surface.Now that this pretty much fits perfect I can glue it down with epoxy , I would then drill the 4 holes out for the handles, and a couple holes to run wire through.
Ok the neck mount has been glued with CA and I'm waiting for that to cure. Once it feels sturdy I will drill out the handle holes.
Ok holes for handles have been drilled and I started playing with fitment of the neck , I may need to get creative with the mounting but so far so GREAT!

I never made a mount at the base of the head so I took the quick route and mixed 6 oz of resin and poured it in upside down. I'm not worried about weight because half of the material will be removed anyways...Bitter sweet , the neck mounts fine but its not balanced , I can either add weight to the rear of the head or move the servo forward about 1/2 inch.

I cut the teeth out of the neck to give me more space.
You can see the head is off alignment to the front some so I'm open to suggestions , I would like the head to be balanced. The servos are 645mg hitec , 133 oz in servos. Should be more than enough to control tilt and side to side movementsPut the neck boot on it and you would probably be the only one who would notice.
That's the problem! Lol I will know. Well I believe ill slide the servo forward a put from where its mounted in the head. That should fix it..... Then I will put the boot on it

Ok I brought the parts in from curing about three hours. Looks like it worked great. I was going to.leave the parts out all night but news shows thunderstorms coming.First time the robot has been off the table since Feb. They are very curious..
His height is right at the edge of the counter meaning he should be just tall enough to grab something off the counter as well. With the position of the shoulder I believe I've gained 2 to 3 inches reach.