

































































cE9s4PsOgeBQIORwjd5!~~60_1-634818020230156250.jpg)







































































































BO)Lupuc4g~~60_35-634706297915000000.jpg)
LupbT6!~~60_35-634706298769375000.jpg)





C5j!~~60_35-634655044863125000.jpg)
















C5j!~~60_35-634659603510781250.jpg)


































C5j!~~60_35-634651704046230469.jpg)






















































































































































































































































































































































































































































































































































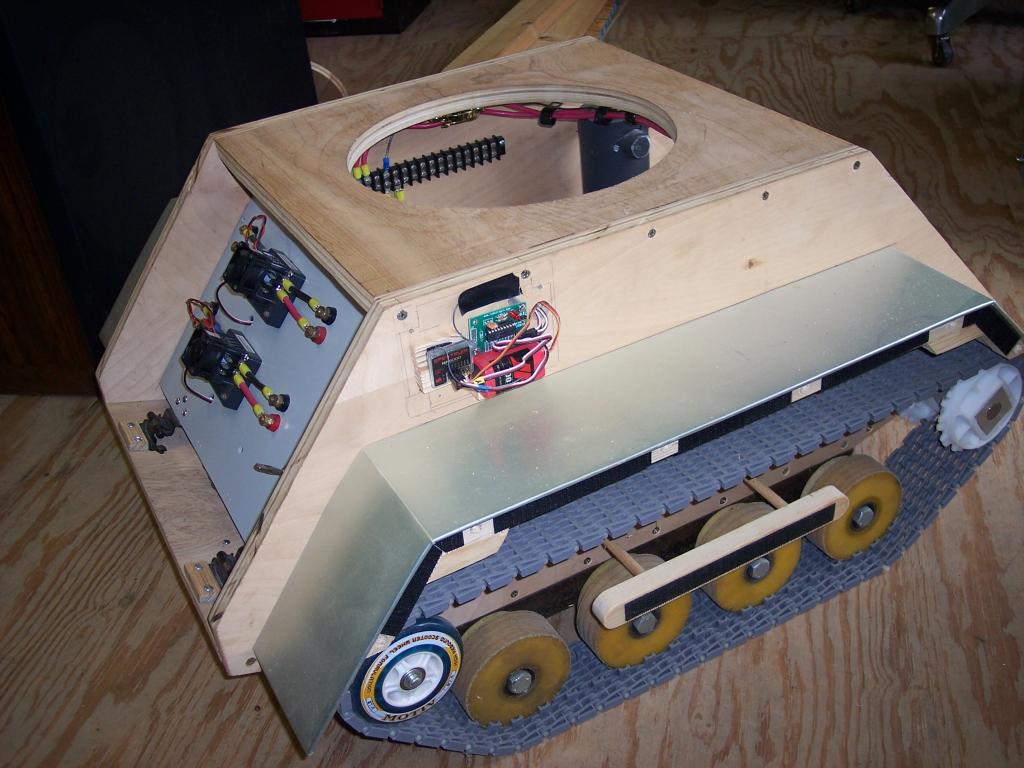
This project has evolved some , the basic rundown is I'm modding two Omnibots , one a regular the other a larger 2000 model. I will have two ezb kits , rad base idea was thrown out because of so much noise but could go back on the table if the omnibot drivetrain is too weak to pull it.





By jstarne1
— Last update
Discover more robots
Rgordon's Magnus The 6 Ft Robot
Magnus: a 6 ft, 300 lb humanoid using wheelchair motors to drive tank treads; builder exploring E Z Robot kit and...

DJ's Ez-B V4 Dalek
Control a Dalek EZ-Robot upgraded to EZ-B v4 with added servos for nose, ray gun and torso plungers via Synthiam...
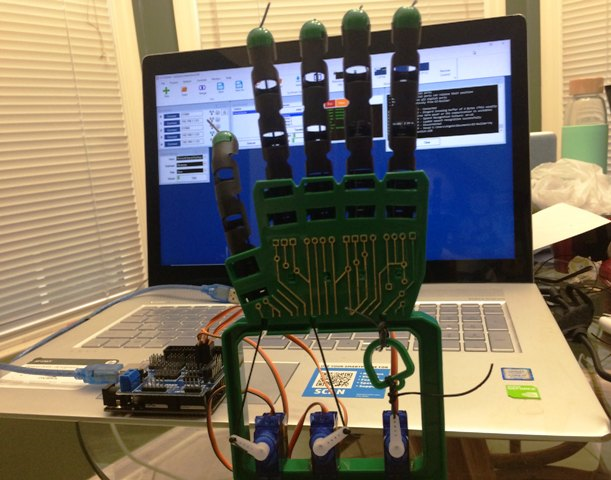
Ezang's Here Is A Picture Of The Hand I Am Practicing With
Photo of the hand I am practicing with

Because my bot is too tall to function like the single roomba distance sensor I believe this array will offer much improvement and ofcourse I have a rear ultrasonic to perform the function of distance measurement like the roombas IR omnicone. At this time I'm planning for the rear ultrasonic distance finder to be in the lower base. O will post pics of that.
Yay! Lynxmotion shoulders came in today! Three brackets , one is actually for.the ultrasonic radar turret so I can adjust its tilt without taking apart the whole base. I believe these brackets will have the shoulders sticking out about a inch more which will be good because it gives the arm more clearence from the sides where it would normally rub.the base.
Sweet....... How's Jarvis coming?
Awesome project! im following your progress every day like reading the news im thinking of Omnibot 2000 for my next project
im thinking of Omnibot 2000 for my next project i really dig all the sensors you have in mind, and my fav the methane gas commenting...hehe. There is a touch sensitive sensor/panel instead of using sonar on top of his head, but getting it to work is another story. It would be nice to actually touch him and he feels it. I'm thinking since it is a variable resistor, may be we can turn it into variable voltage source and be able to read by ADC port on EZ-B and have script response to the different voltage.
i really dig all the sensors you have in mind, and my fav the methane gas commenting...hehe. There is a touch sensitive sensor/panel instead of using sonar on top of his head, but getting it to work is another story. It would be nice to actually touch him and he feels it. I'm thinking since it is a variable resistor, may be we can turn it into variable voltage source and be able to read by ADC port on EZ-B and have script response to the different voltage.
Something like this: www.pololu.com/catalog/product/1645
Go Josh! Go Josh! Go!
few points on sensors,since i know more about then most stuff first on touch sensorforce not always the best,if you want to add touch to your robot you use a capacitance type,so the plate is on the inside of the robot
on gas sensors they use a lot of current because of the heater ,i do have alot in stock i have almost any sensor made,for my testing and using them in my projects
one i hope to do a website on all sensors made ,good points and bad points of each one there is even 2 new sensors on the market,would love to get one but high price now one is called the nose sensor for smells other is a taste sensor
just ordered a EEG sensor (headset) $300 for controlling robots with my brain
some other points on using your IR sensors,on home base you have a spinning or rotating 180 degree IR transmitter (led) ,since most likely you will have the home base near the wall,on the robot you have a few IR detectors with a flashlight mirror on each one ,then you will have wide detection and 360 degree pickup then with software have it lock on to the transmitting beam as the robot gets closer and closer to the home base
@sfoy he's coming along I took a week long break from big fanning on the body because I needed to take time to clean the kitchen , buy a new toolbox , and start organizing stuff , I could not get anything big done because everything was so cluttered up in boxes and tools everywhere I couldn't find which one I needed in a reasonable amount of time , plus the kitchen sink had grown a life form me and my roommate named Steve , I had to kick Steve out of the kitchen sink since it was hanging out without paying rent! Lol.
@louis T. Thanks I really appreciate it , that makes me feel like a million bucks , feel free to talk , ask questions or suggestions anytime , this is a learning development! Omnibot is an excellent base to hack , just yesterday he made a few appearences on Big Bang Theory , one of my favorite shows. You can start simple and have tons of room to grow.
@glickclick thanks for.the help in suggesting the proximity sensor before , I know your working diligently to get it working and tested! Your efforts are appreciated
@moviemaker. Thanks Mel! Since the man kitchen is as almost organized and I'm feeling better from the temporary kidney problem , I'm getting back to work.
@robotmaker that would be great to get some sensors , I know you have such a vast collection , I really appreciate everything you have thrown my way. Just remember I'm new with no robotic knowledge of sensors so you gotta tell me how to use it / hook it up lol , ps still trying to figure out this 5 wire dirt sensor :/
Update , the rear facing motion detector has been placed and installed , about 160 degree wide view all the way around
This sensor can will work in tandem with the chest sensor or I will replace the chest sensor with a power button.
Jarvis claws are more than capable of grasping different sized cups , but who cares about.that , this is the size that matters right?? A good ole can of....soda ;p
There are two challenges of the claw , knowing how tight to grip and knowing when to stop gripping , the tightness issue I believe can be accomplished with a stall sensing circuit as these are dc motors. But I.need to put a sensor of some type that will reliably tell the claw when the cup or can is pressed agianst Jarvis palm. Pressure sensor? Proximity? Any suggestions are welcome please leave links for the product you are suggesting. It must either be capable of affixing to the palm or components small enough I could drill small holes or something , ir sensor? A momentary push button? Alright hand me some suggestions