

































































cE9s4PsOgeBQIORwjd5!~~60_1-634818020230156250.jpg)







































































































BO)Lupuc4g~~60_35-634706297915000000.jpg)
LupbT6!~~60_35-634706298769375000.jpg)





C5j!~~60_35-634655044863125000.jpg)
















C5j!~~60_35-634659603510781250.jpg)


































C5j!~~60_35-634651704046230469.jpg)






















































































































































































































































































































































































































































































































































This project has evolved some , the basic rundown is I'm modding two Omnibots , one a regular the other a larger 2000 model. I will have two ezb kits , rad base idea was thrown out because of so much noise but could go back on the table if the omnibot drivetrain is too weak to pull it.





By jstarne1
— Last update
Discover more robots
Pirumpi's Ez-B, I Would Like You To Meet Nodejs
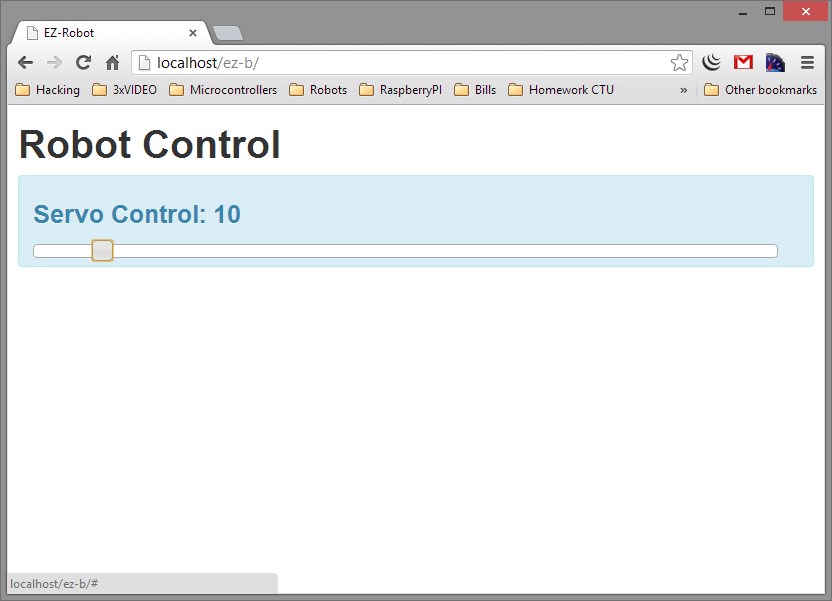
Control EZ-B robots from web and phone using a Node.js module via Synthiam ARC TCP interface with jQueryMobile and...
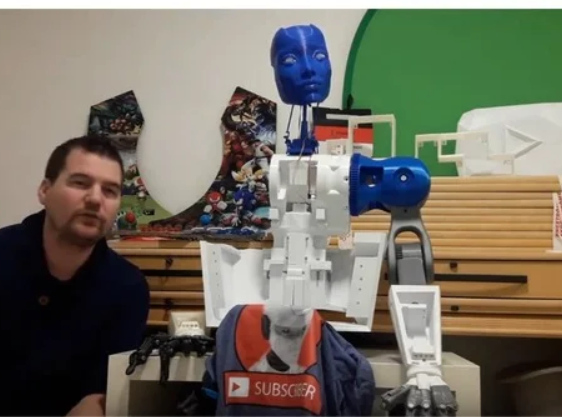
Animator28's AVA (Advanced Visual Android)
Human-sized open-source 3D-printed humanoid robot AVA with free Thingiverse files, built on the EZB platform, seeking...
Ezang's 3D Printing Again 7/18/2021 - Detecting A Sound File...
Mr. Metal returns - audio may be low; increase volume and leave a comment for EzAng.

motors are the same width,but much longer,they handle 40 lbs each ,so total is 80 lbs
also on the IR placement,only need 1 IR and detector like most robotist uses only need a omnicone to give it 360 deg detection
What is an Omnicone?
Josh, I have the Temperature sensor on Gorgeous. She comes back with a voltage from 0-5 volts. I haven't figured out yet how to make her tell the Exact temperature. When you get that done, please share it with me. Or, visa-vera.
Mel
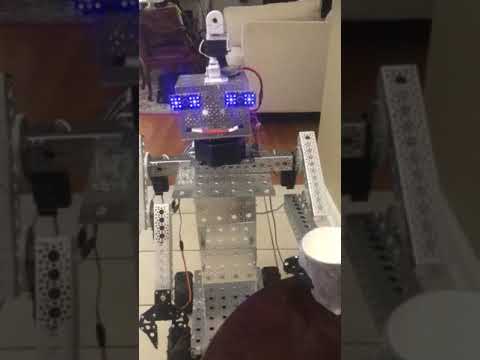
Wow Josh! Jarvis is so NOT a toy any more. I love the sensors around the rear of the head, and the turret.
OMNICONE IS 360 deg mirror ,then IR light hits it sends the light 360 deg or if using as a IR detector it picks up IR AT 360 DEG IR has a very narrow detection,not like sonars ,so when JOSH is using it wont pick up very well ,will need about 16,plus the cost is very high all you need is a home base charger or beacon from IROBOT ROOMBA for the cone,or 360 deg mirror
@Robotmaker. If I need to add a few more sensors to increase the accuracy I can add an additional sensor between each ones already there. The omnicone sensor only has 4 individual IR sections, the mirror just reflects the light @ 90 degrees down on the sensor. If you think I need to add additional sensors I will , if I did the separation between sensors would be 10 to 15 degrees. Currently separation is about 20 to 25 degrees.
@mel you should be able to do some math to.figure degrees , find the sensitivity . You may be able to just divide.
Josh. thanks, Mel
@JOSH you have it wrong about a omnicone (360 deg) mirror a omnincone does 360 deg not 180 deg ,like the one on the roomba it only has one IR receiver