
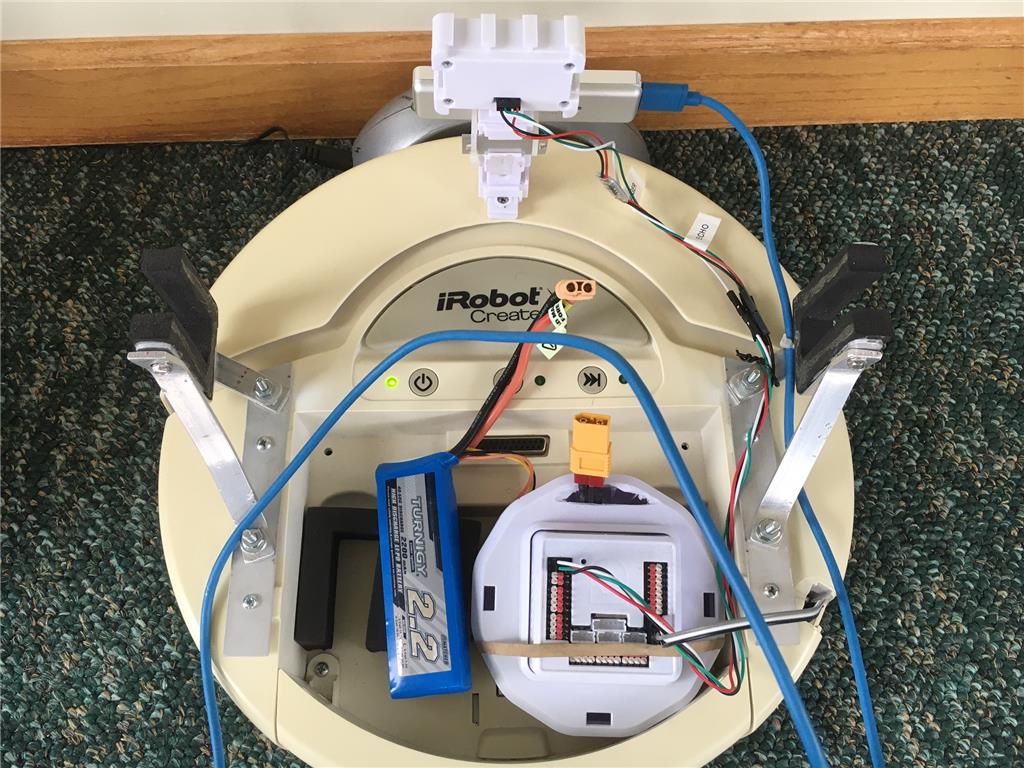
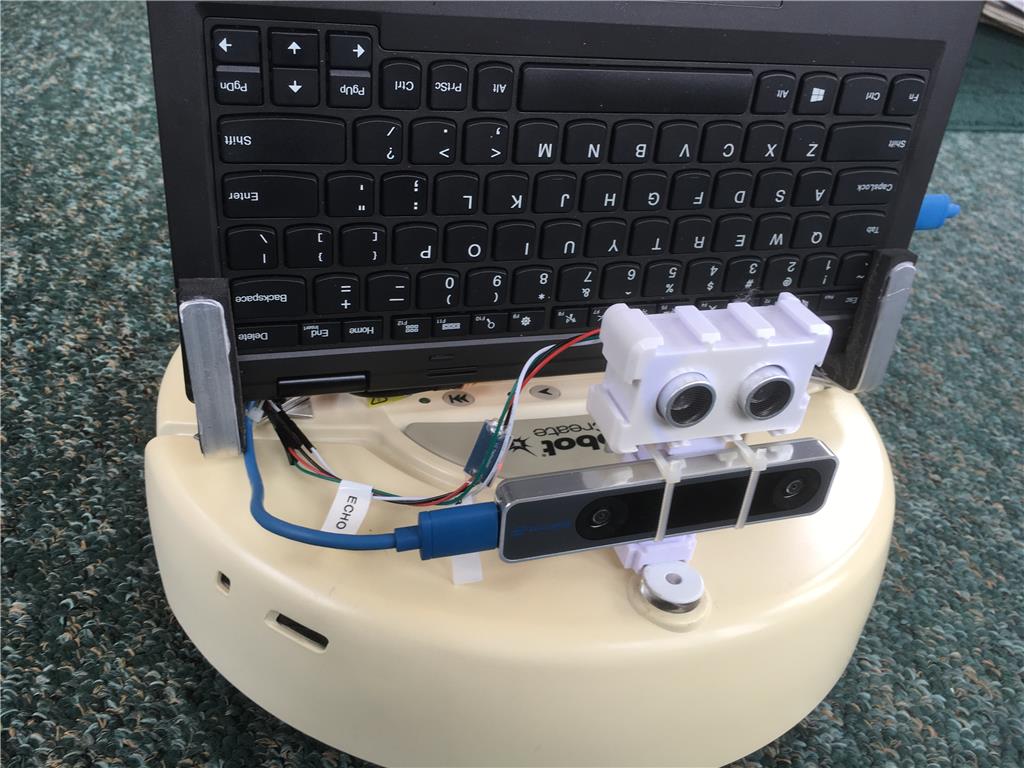
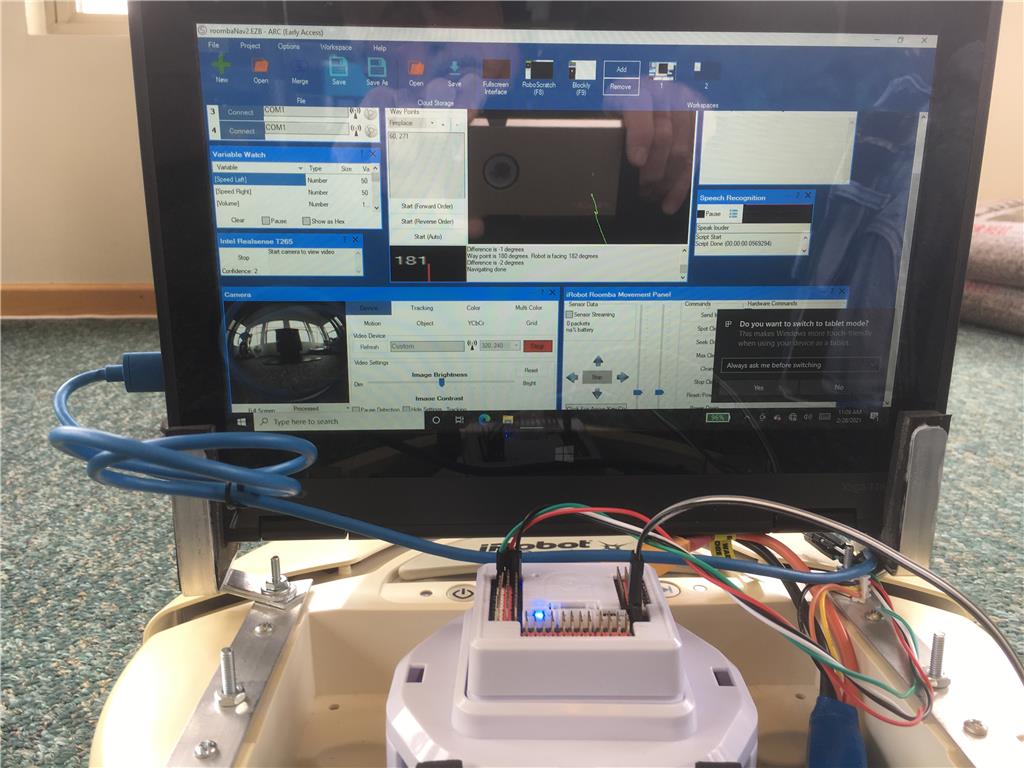
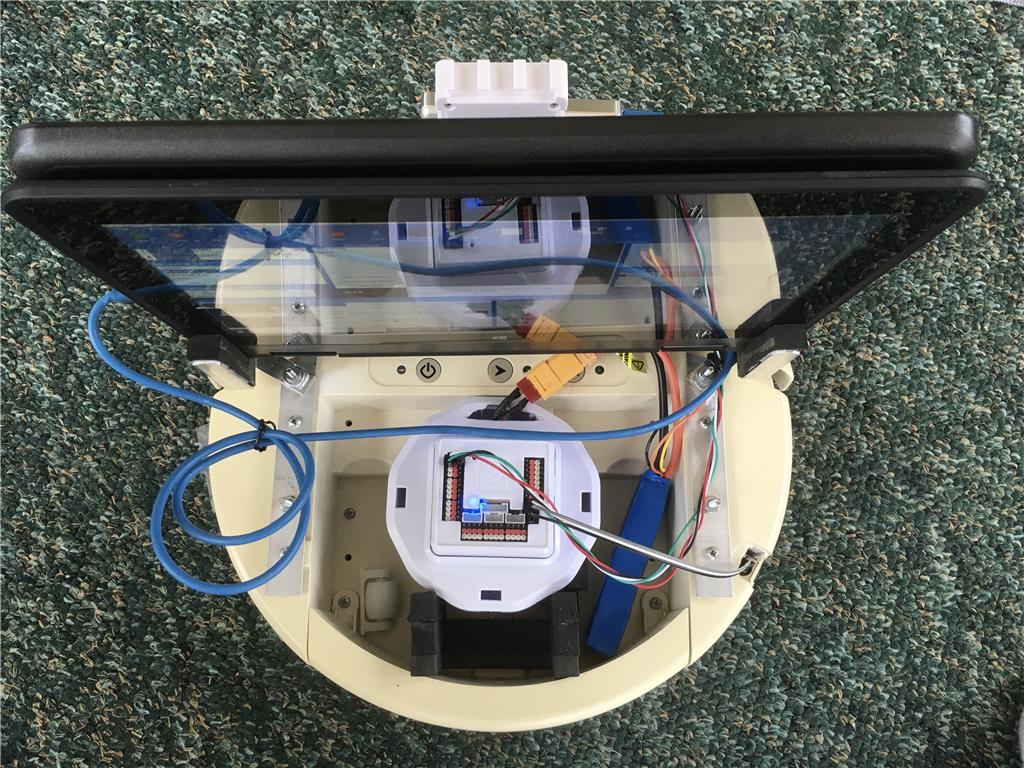
My Navigation test robot with Intel RealSense T265 on a first Gen IRobot Create using an EZB, and my wife's older Lenovo Small ThinkPad that just fits into a cradle to secure it for navigating. It folds up into a tablet with touchscreen. My first EZ robot build Captain Ann Droid was kind enough to donate her base for the advancement and greater good of Robotkind(: I am using the EZB Uart port, but does not work with the IRobot wheel counts and feedback, only T265 and one ultrasonic sensor. When the confidence level is at #3, I realize the best results, in good sunlight. I had to remove the 4th wheel on the Create to think about docking, so I balanced the notebook accordingly. Have not done that yet. I was so excited how this works, I forgot to remove the long USB cable. Over all I am thrilled with this new adventure for my robotics, and looking forward on any updates. Intel wants to sell me another camera to go with the T265. I wish I could remote from the ThinkPad (it has Windows Pro) to my HP, but it would cost $100 to update it. Maybe there is another option?
Thanks DJ and Synthiam for this new adventure of navigating for robotics. Steve S
Discover more robots
Jstarne1's Diy Awesome Project Case Made From Netgear...

Ericez's Mini Chappie Project


nice build Steve
EzAng, Thank you, but I am very slow at it.
Steve, i use Teamviewer, its free for personal use.
https://www.teamviewer.com/en-us/
proteusy, Thank you for responding, I will check it out. Am I correct in thinking that it would require ARC on my other Laptop also?
Nop, you dont need ARC on both machines.
Has anyone with the newer IRobot Create 2 or Roomba (600 model) realized a benefit of the wheel count data into Navigator? Have anyone run it without the wheel feedback to see a difference, using only the T265? I am using the EZB Uart port at 57600 works great, but does not work with the old IRobot first Gen Create wheel counts and feedback, only T265 and one separate ultrasonic sensor. The old Create and 400 Roomba series do not have the IR sensor across the whole bumper. Would I gain much better navigation with a newer IRobot base?
Nice work. Its lots of fun and if you spend some time mapping the floor out you can vacuum in record time without smashing into furniture. To use the computer from my Mac I just use Remote Desktop I also use it on my windows and linux puters. Works like a charm with the free not activated version of windows pro on my roomba
Install tightvnc, it’s free (https://www.tightvnc.com/download.php)
(https://www.tightvnc.com/download.php)
here are two great links for having a pc on the robot:
storage and performance tips: https://synthiam.com/Support/Install/free-space-with-windows-10
headless & remote connectivity: https://synthiam.com/Support/Install/headless-robot-sbc
that’s a real great build!!! I like the way the laptop is mounted