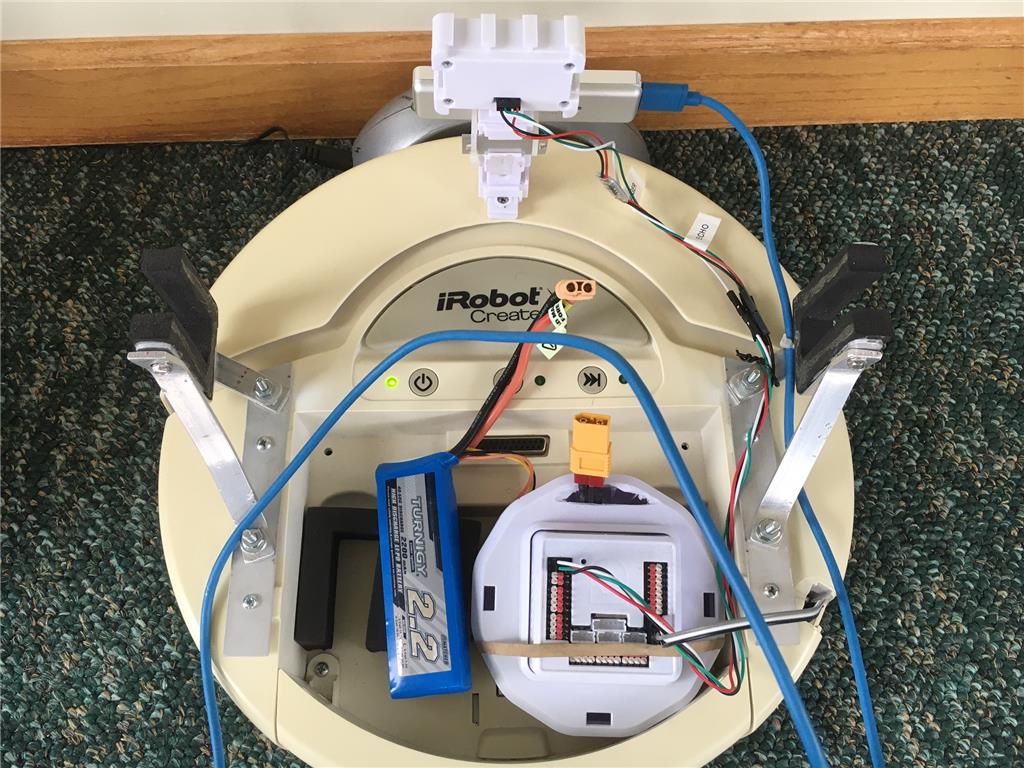
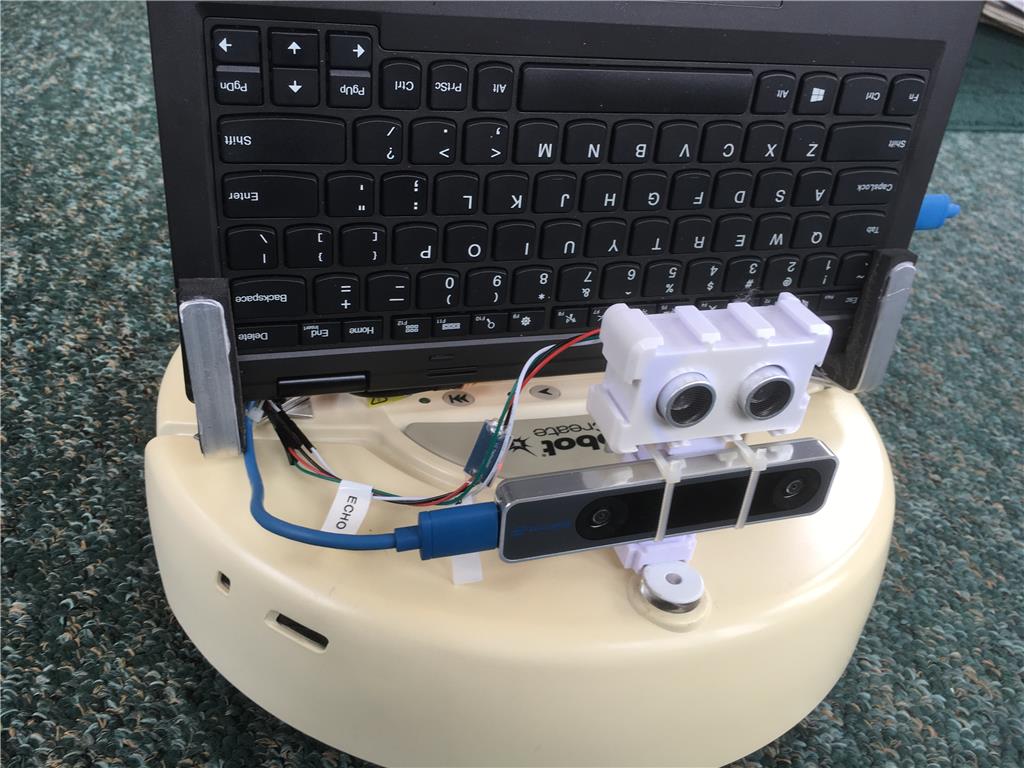
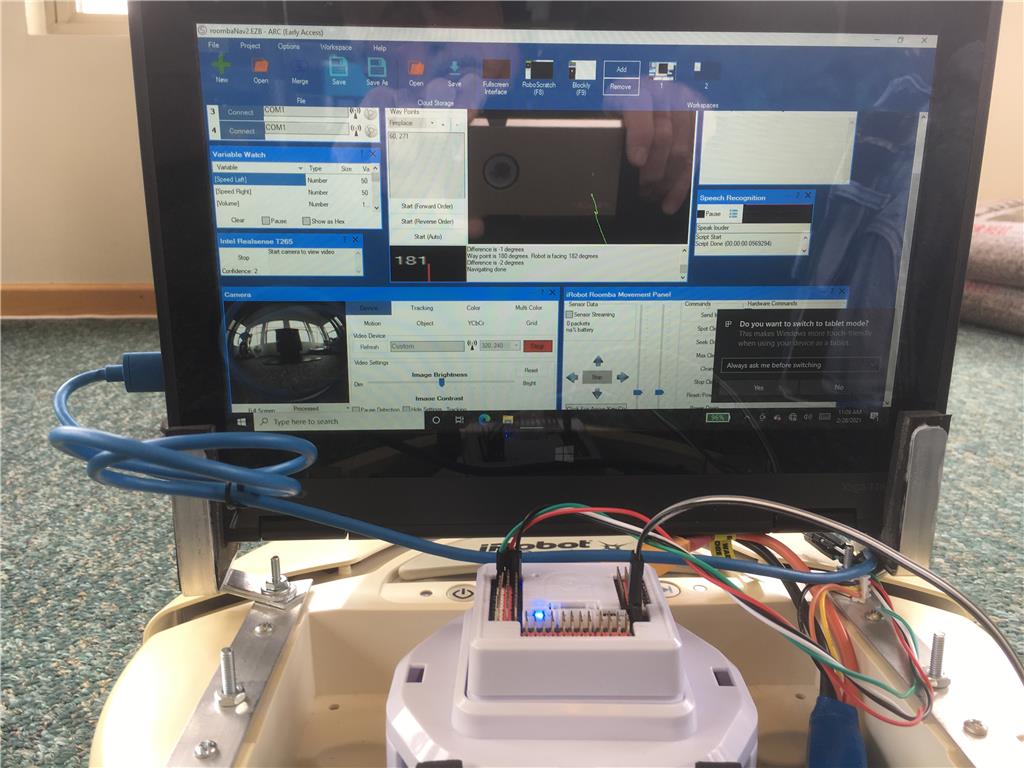
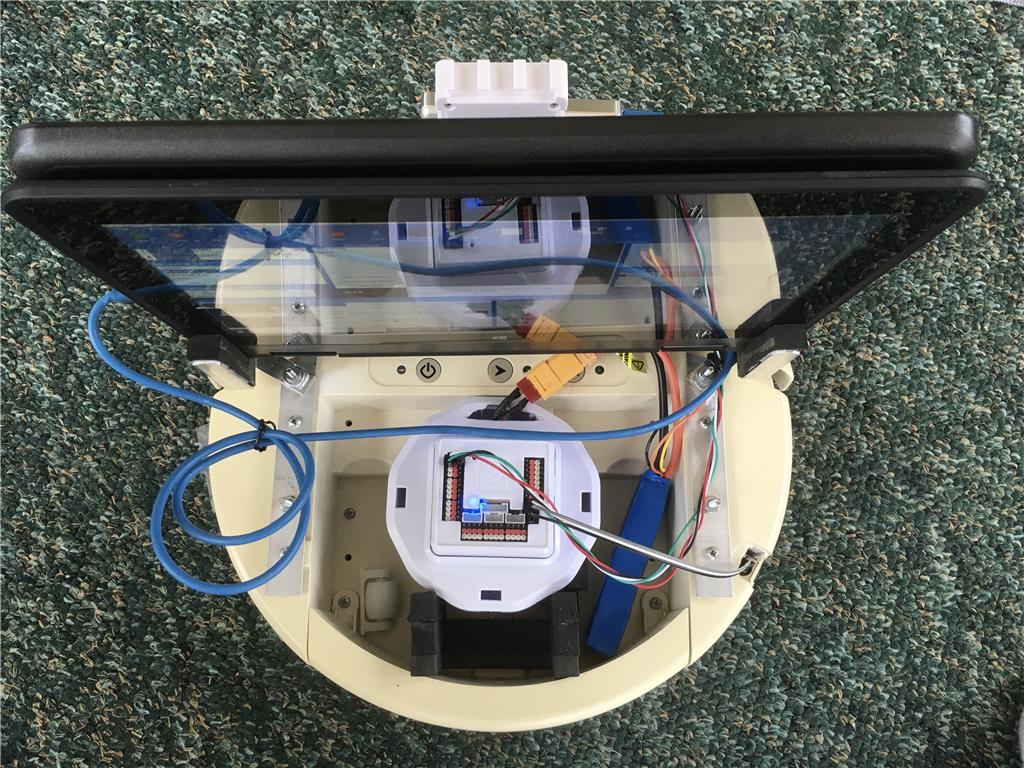
My Navigation test robot with Intel RealSense T265 on a first Gen IRobot Create using an EZB, and my wife's older Lenovo Small ThinkPad that just fits into a cradle to secure it for navigating. It folds up into a tablet with touchscreen. My first EZ robot build Captain Ann Droid was kind enough to donate her base for the advancement and greater good of Robotkind(: I am using the EZB Uart port, but does not work with the IRobot wheel counts and feedback, only T265 and one ultrasonic sensor. When the confidence level is at #3, I realize the best results, in good sunlight. I had to remove the 4th wheel on the Create to think about docking, so I balanced the notebook accordingly. Have not done that yet. I was so excited how this works, I forgot to remove the long USB cable. Over all I am thrilled with this new adventure for my robotics, and looking forward on any updates. Intel wants to sell me another camera to go with the T265. I wish I could remote from the ThinkPad (it has Windows Pro) to my HP, but it would cost $100 to update it. Maybe there is another option?
Thanks DJ and Synthiam for this new adventure of navigating for robotics. Steve S
Discover more robots

Ezang's New Mr. Metal Robot 2020

J's My New Toy I'm Building


I finally have remote access to my navigation robot laptop, thank you proteusy.
The performance tips helped a lot, thanks D.J.
Added more bracing to my laptop cradle, helped steady the laptop, now facing forward using the integrated camera for viewing robot location in another area.
I ran a back to back test with same lighting comparing Uart 0 control on navigation vs. send serial D7, with the send serial results being much less accurate consistently with multiple testing. Maybe send serial is slower? My 1st Gen. IRobot Create does not work with the wheel count measurements, and lacks the IR bumper sensors. I was going to switch the EZ B to start another project, and replace it with LoTiny, but now will order another EZb B.
Are there any tips or tricks to improve navigation? Thanks Steve S
@Steve S by looking into the community, i found your robot. You use only one camera t265 for the navigation and one ultrasonic. Id like give a try on my JD chassis. why do you use the uart ? Could it work when we have WiFi on the tablet ? I may miss a point here, thanks for infos.
The iRobot robot vacuums require a uart connection to the ezb. This is the programming port which allows roombas to be controlled by a 3rd party device.
You can find out more information in the iRobot robot skill manual.
ok, understood. thanks