
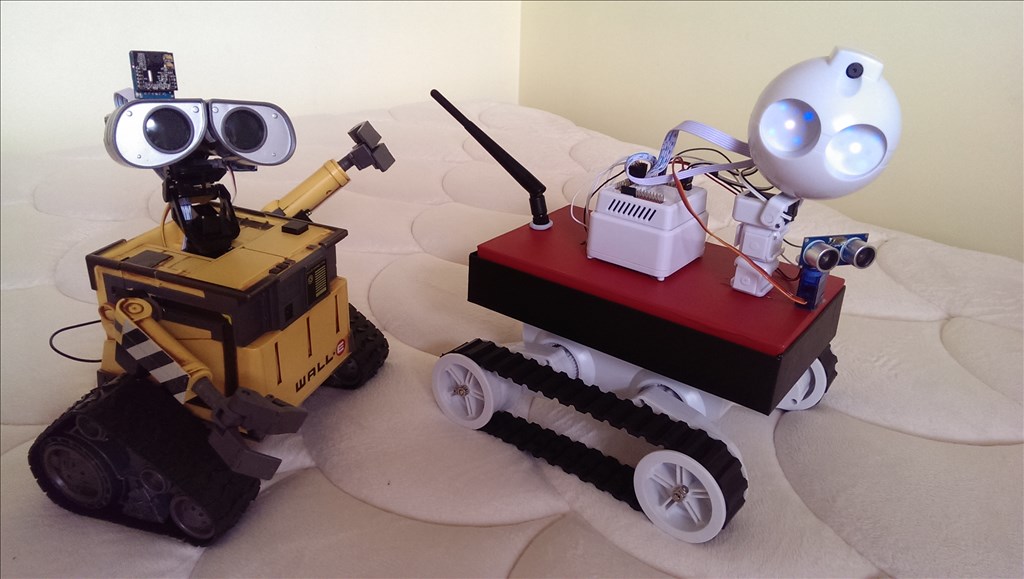
My Wall-E has a new playmate with tracks, my own "Rolly".
My Wall-E has a new playmate with tracks, my own "Rolly". I made it in a couple of hours with a 2WD Rover 5 base I got locally, Ultrasonic sensor from my development kit, Ezb-V4 and a JD head I received in the mail recently. The box houses 2 large Lipo batteries and the HBridge so a lot of wires are hidden. The two batteries give "Rolly" long playtime which will allow plenty of experimentation. In time "Rolly" will get more sensors and a nicer body
By Tony1952
— Last update
Discover more robots

Redzone's Mo, My Inmoov
Inmoov Mo build progress: assembled torso, shortened neck to fit larger head, awaiting EZB4 to power the head and add...

Jeremie's R.O.B. Robotic Operating Buddy
Hack and modernize NES ROB using Synthiam ARC and EZ-B: RGB eyes, servos, IoTiny, LiPo, speakers, motors, scripts, 3D...
Mitzeljk's Meet Modi
Modi mobile voice-recognition robot controls a computer via EZ-B scripting and H-Bridge, built on an RC car base from...

Nice Tony.... just need some arms.... I was thinking about grabbing a rover 5 base myself.... Is it any good? Do you have the 2 or 4 motor version?
Edit I see you have the 2 wheeled version
Rover 5 chassis isn't bad. I have a 4 motor version. Mine had a tendency to throw a track occasional when running on carpet. So I converted to wheels. I think the problem was my robot got heavy. I put in a big battery so he could run around for quite a while.
Wifi antenna is a neat idea for a tail on Tony's. Mine is still running an EZ-B v3 so my box is much bigger to hide the battery and all the messy wires. It is probably why mine is so heavy. Tony's is a neat compact design.
@RobertL184... Thanks, good to know....
Very clever Tony! Love the tail. Wicked sweet engineering.
Thanks @Richard R I've only used the Rover 5 for a couple of hours so far, so I can't really report if it's any good, but to date i've had no problems and it runs/turns well. I'm in no hurry to get any arms yet as I built this robot with two large capacity batteries so I can learn ARC functions and experiment with some sensors
Thanks @RobertL184 I did some research on the Rover 5 before buying and read about it losing tracks. I came across this discussion and associated links https://letsmakerobots.com/content/dagu-rover-5-shedding-tracks-turns I got some reassurance from OddBot's statement (from Dagu the manufacturer) that "The newer Rover 5 Chassis's being sold now have a modified wheel shape that keeps the tread on much better" I've had no tracks come off. Turns on the carpet can vary according to the direction in the "grain" of the carpet" ie there is grip or slip, but otherwise it tracks OK I'd like to see pics of your bot, it looks very well equiped. A forum search finds nothing (which is usually the case for me) Your profile reports "No EZ-Robot Projects from this user yet " The stamp sized avatar does not magnify very well either.
I knew I'd find a good use for that old wifi antenna one day
" The stamp sized avatar does not magnify very well either.
I knew I'd find a good use for that old wifi antenna one day
Thanks @Dave Schulpius I really appreciate your praise I'm now considering fitting a single servo under that tail to give it some movement
I'm now considering fitting a single servo under that tail to give it some movement
@Tony... Thanks.... I think I might grab one and make a Roli of my own...
Cheers Richard