
-634823693586132812.jpg)



-634833267676093750.jpg)
-634833267899218750.jpg)
-634833269127656250.jpg)
-634833269319218750.jpg)
-634833269574062500.jpg)
-634833270124843750.jpg)

-635019910467392578.jpg)













-634767667799482421.jpg)
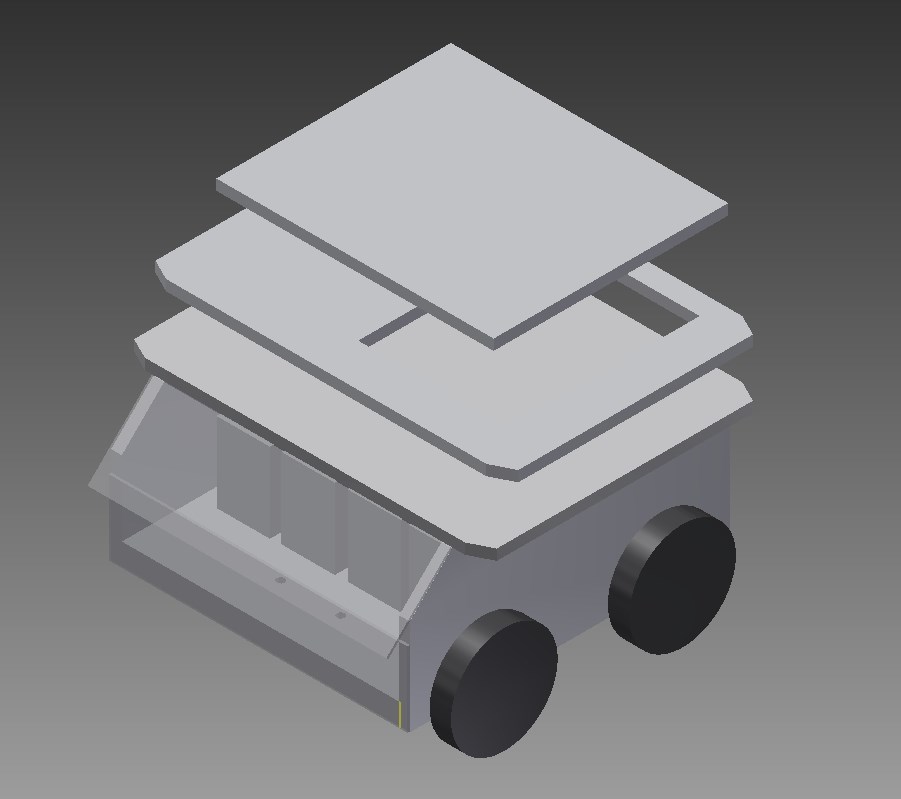
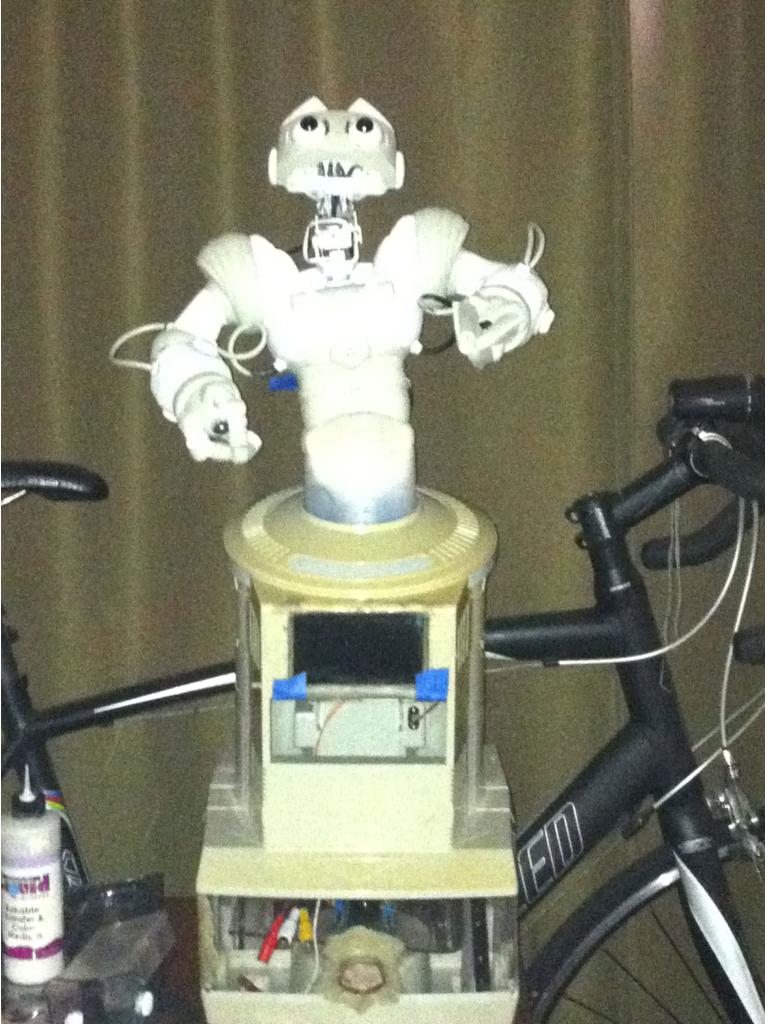
I am using a hearoid omni bot base. - The base will house: need some new treads if anyone has any ideas of where to get.
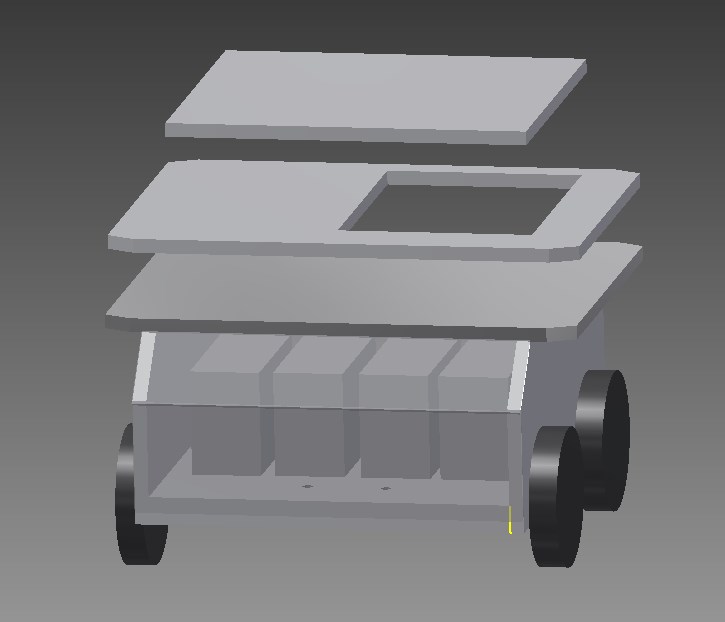
mini itx, https://www.newegg.com/Product/Product.aspx?Item=N82E16813157228 8gb ram, 120gb ssd - had to raise the base 3" to accommodate the mini itx.
This method, cost me $14.86, without the solvent solution. I had that from a previous display case project. It is kind of expensive like lose to $30. Now to bond them is easy and very strong, but I do recommend that you have help. It is hard to hold it in place and place the solvent along the seam. I went to taps plastic and they have videos online.
I used acrylic plexi glass, had them cut to size. Did the sides in pieces to go along with the slight curve in the body. Just two pieces. The front needed to be curved a bit so I used a heat gun and got the end hot. (I have a mission style coffee table with slats. Stuck the hot plexi glass in the slat and bent until I got the curve I wanted. I used the acrylic solvent to attach it to the hearoid base, then to each other. I used a " square plexi rod, measured out how big I needed and scored it all the way around with a pvc hand saw then snapped it. Almost perfectly clean every time but some uglies in the process. But inside so I don't really care. I used the solvent to place these inside as support attaching to both base and acrylic pieces. I did this waited about 15 mins then put a cutting board on top with a 39.4lbs statue and moved it a bit, tried to be gentle since it is supposed to cure for at least 24 hrs. I will go in later and fill any gaps with a sculptable epoxy. I plan on painting the base. I did drill out the hole in front for the ir sensor and the light sensor. (Took this from ottobot and will use the little cover for the outside of it. Already molded it in. I also have two little ir object sensors I took that I plan on putting on the from right corners. I need to finish digging that out.

ez-board, h-bridge all hooked up
batteries (Batteries and power still have not been decided.) I got this power supply per robotmakers suggestion. https://www.amazon.com/gp/product/B003DXV9O2 I understand hooking it to motherboard, ssd, etc. then the three wires that come out to power ground and ignition or switch. But it has this jumper thing that I am not sure about. Advice welcome.
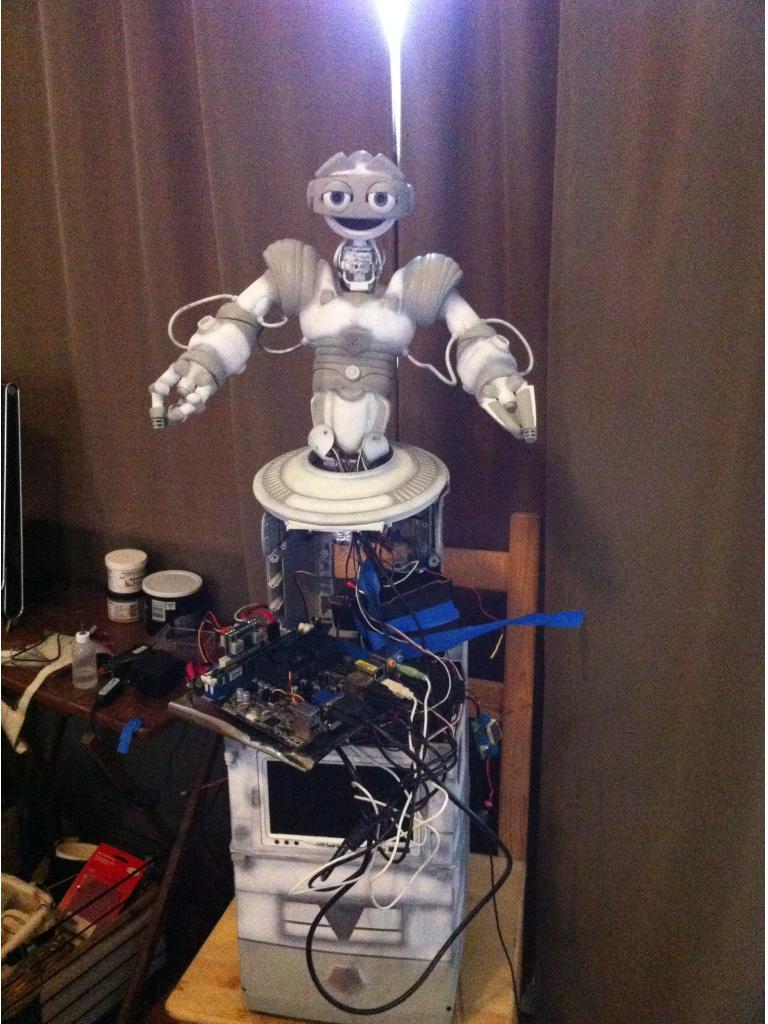
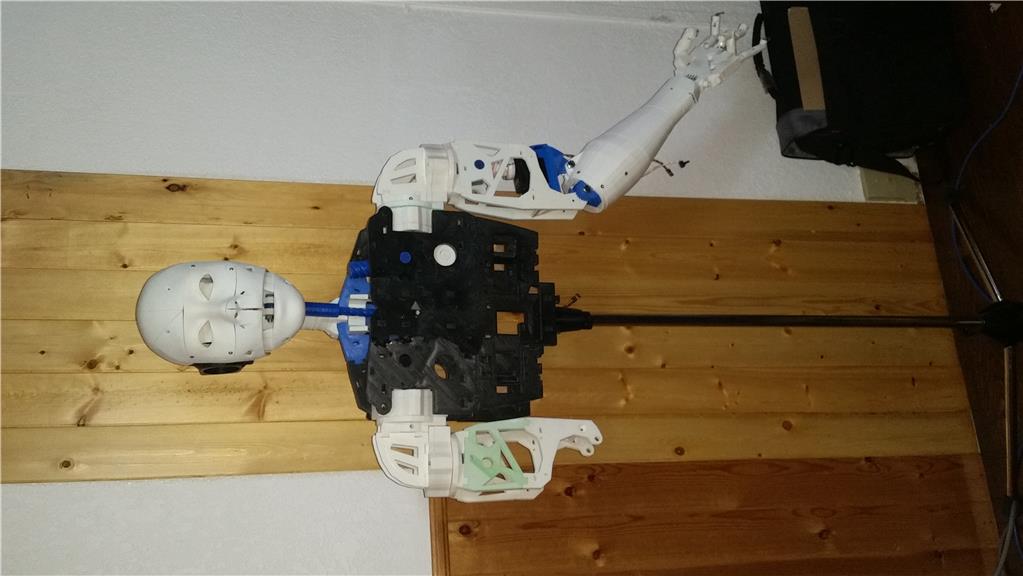
Eventually the torso will be ungraded to a different one once I figure out the whole arm thing but in the meantime I am going to use robosapiens torso and thanks to DJ he made that really easy for me by integrating Robosapien. Woo hoo.
The head from an Ottobot. I poked his eyes out and am putting in two cameras. I have one already and it fits great. Head will probably be too small once I upgrade arms.
I have ordered and waiting for shipment from China. The other camera, pan and tilt brackets with some heavy duty servos with metal gears, and the little screen.
Was thinking of a little keyboard for little things but will remote in when big things need to happen.
He will be grey/white or black/white in the end. Haven't completely decided. Leaning toward a grey/white look though.
Still need to figure out: Lighting Speakers - I have two from robospaiens. Then a third that was already on the hearoid base. Plus a little one in the head of ottobot. I am going to connect that one to robosapien so when he turns on he'll yawn out of the one.
Power is really my next big one. Trying to wait until I am more settled so that I can better judge how much power I will need.
I am thinking of ai software, was recently introduced to that Denise. OMG. I am still drooling. But I also have looked at leaf, more programming than I really want I think. I am no programmer. I also looked at Ultra Hal but lacking in many ways. DJ thinks a EZ-B version of an AI may be in our future but I am way too impatient to wait.
Discover more robots
Kazobond's Dude (Another Inmoov)

Thefoolmonty's Joc's Ucontrol Wall-E


This is such a COOL looking bot, I love it!!! I had an idea for the tires. What about the flat style bungee cord applied with a contact cement to the wheels? Just a thought.
You did that riser so well I would pay you to do mine! It's really. Great looking , you should paint it but leave a center strip clear. The l298 seems to work well for the omnibots , the peak at 4 amps which is same as the motors. When you make mounts for your board consider mounting it upside down , do the gives you more room , then the topside of a motherboard mount you can use for batteries

Seriously though that Plexiglas riser is amazing! I love it.
@ sfoy - I absolutely love this bot! I had to say it again. What an inspired idea to put robosapien on top. What are you gonna do with the original arm holes? Some cool second set of arms lol?
Well, Sfoy, you have really got us all thinking now - absolutely love the combination of bots and with robosapiens upper torso and an ottobot head - wow. I'm interested to see what wheel configuration you choose to get him moving around.
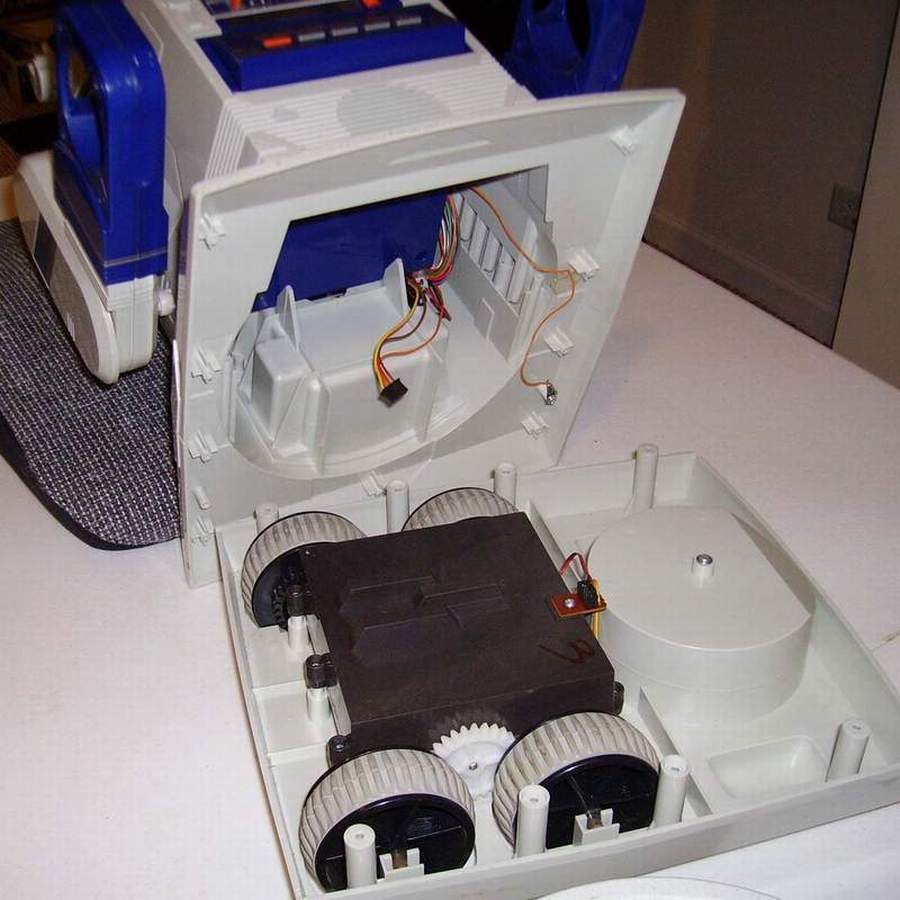
Bret - That's a good idea for the tires. The base is the omni base and it looks as if the tires were left outside in the sun, a few of them the treads are totally flat and squishy. I did make a mold of one of the tires but it doesn't come out very well. Original arm holes are now speakers, I just got some little covers for them.
Josh - I would do it for you (no charge just parts) but you'd be upset that you shipped it if you saw how easy it was. It is best to have extra hands. My first time working with this stuff I made a custom display case. My dad was in the Navy on the USS Independence and made a model of it for Christmas last year. Needed a bigger display case then I could buy. Good idea about flipping upside down but now sure if that will work with the wifi thingies. You have some huge batteries.
I'd like to get something smaller like this but 12v. batteries What do you think?
Hazbot this is the body I am using.

DC motors inside with the gear box.https://www.ebay.com/itm/High-quality-New-DC-12V-Portable-9800mAh-Li-ion-Super-Rechargeable-Battery-Pack-/270973694724?pt=US_Rechargeable_Batteries&hash=item3f174a7304
Hey Sam , here is a great battery for 31 , I plan to upgrade to 4 of these once the bot is scooting around. The lithiums are 1/2 the size of my lead acid batteries.
How many do you think I would need?
Such an interesting combination! It really is frankenbot for sure!