

-634836744289375000.jpg)
-634836744472343750.jpg)
-634836744677031250.jpg)
-634836744810468750.jpg)




-634686556725781250.jpg)
-634686557068906250.jpg)

-634680146761406250.jpg)
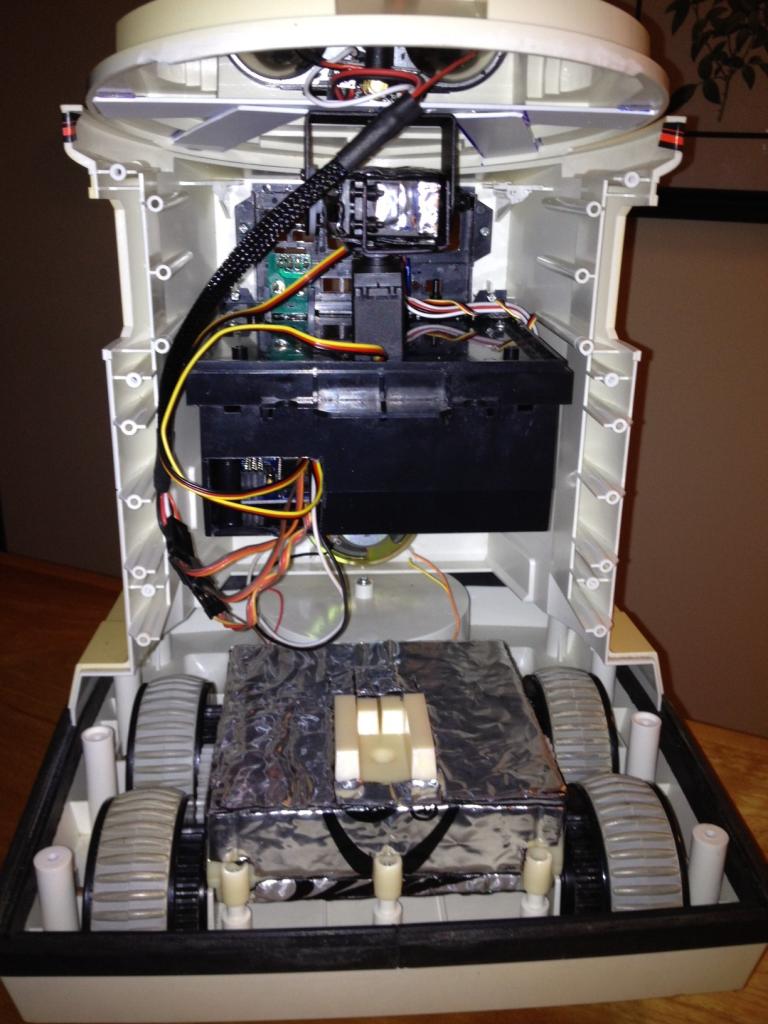
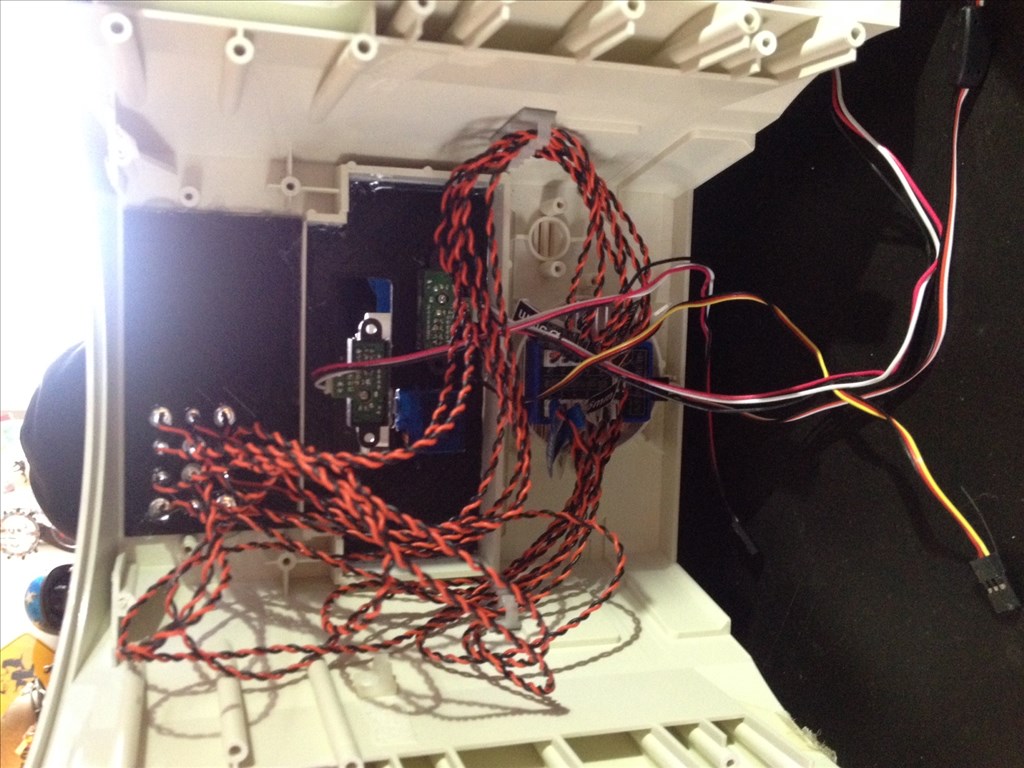


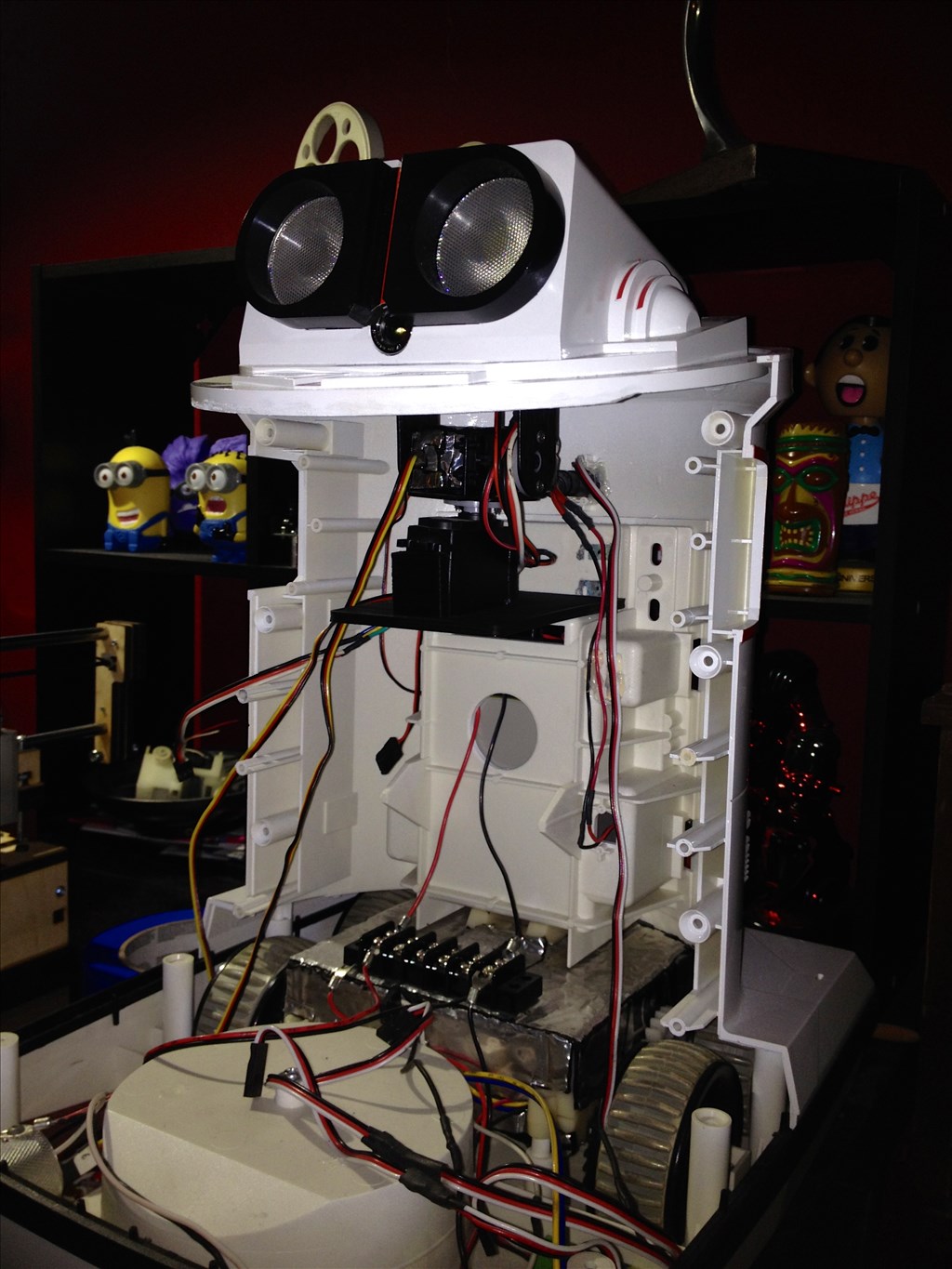

This is my Omnibot Tomy. I haven't really been able to work on him much, but I've been collecting a lot of parts. I have the camera working now, even though it isnt mounted yet. The radar and corresponding servo is working well. Still waiting for Dj's motor controller to come back in stock to get him moving around. He's definitely a work in progress that I'm taking my time with. Im going to leave him yellow. I was going to paint him but the faded and dyed plastic actually kind of grew on me.



PS he has the other arm.. its just in pieces at the moment...
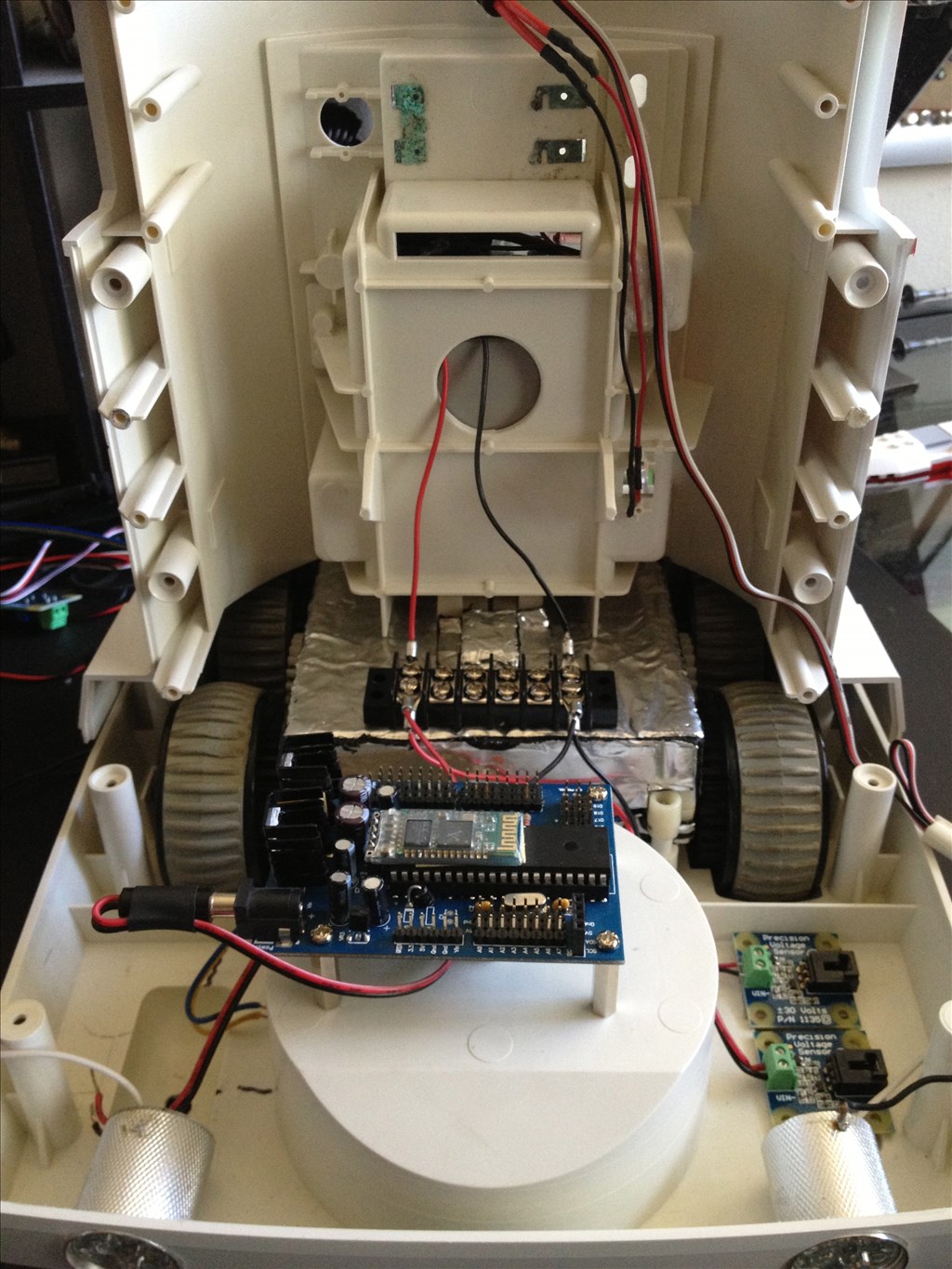
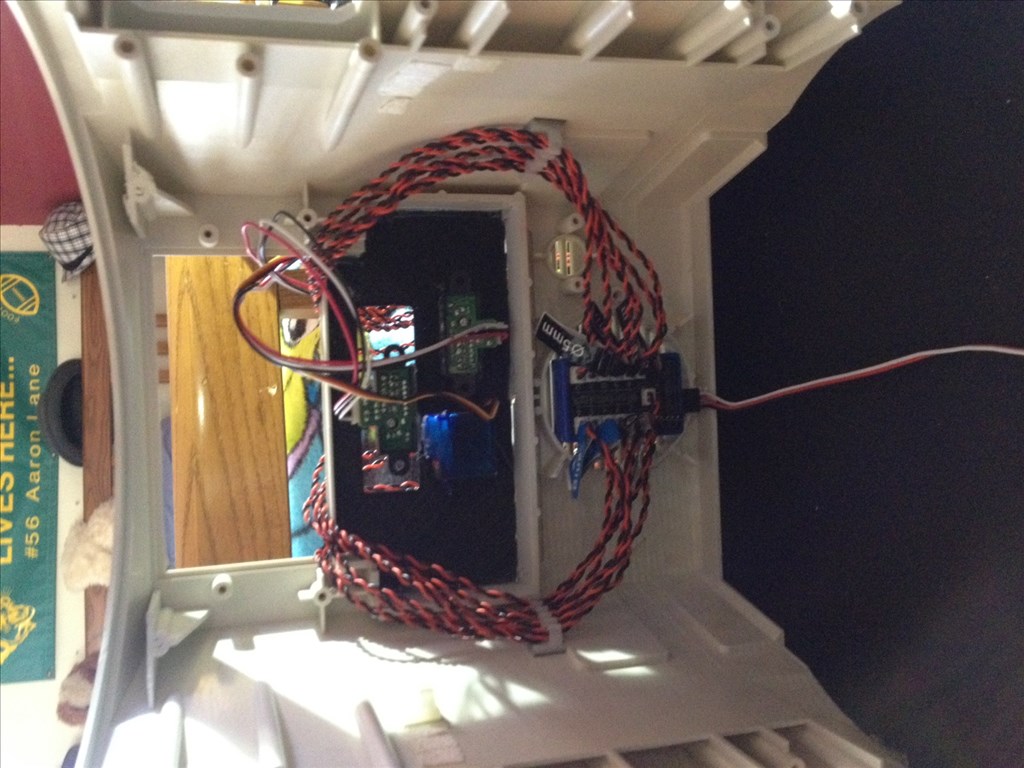
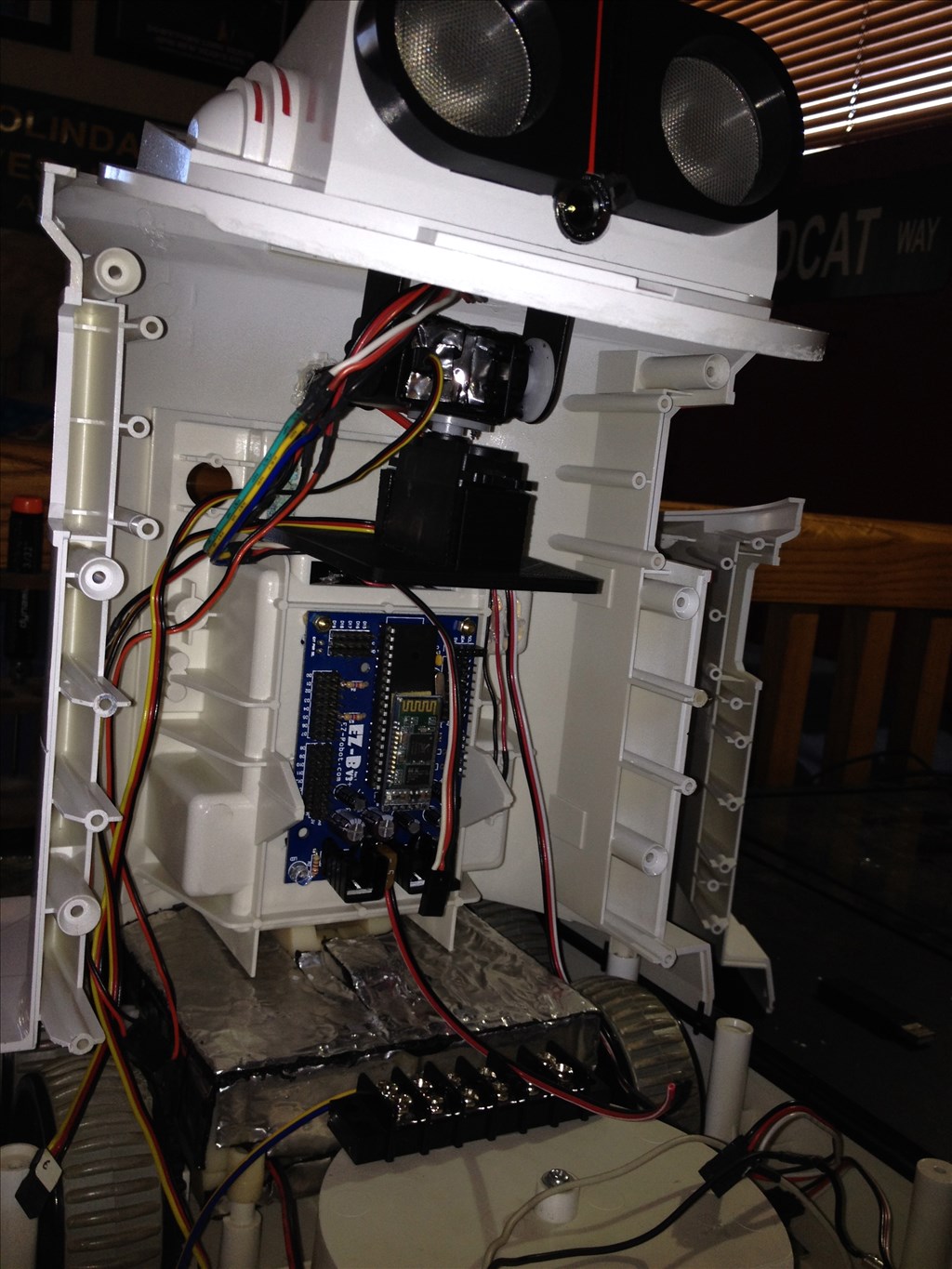
I resolved the camera problem that I was having earlier. Now however, I'm having trouble getting the ezb to connect to the computer. If I open a new project it connects just fine but then eventually has the same problem. I cant seem to get the ezb to connect while in my projects folder. Do you think its a problem with my blue-tooth or how i am formatting things? Any suggestions would be great.
Thanks Aaron
Discover more robots

Cambot1's My Name Is Cameron, This Is My First Robot 6

Spooky67's Synthiam : Mars First Contact

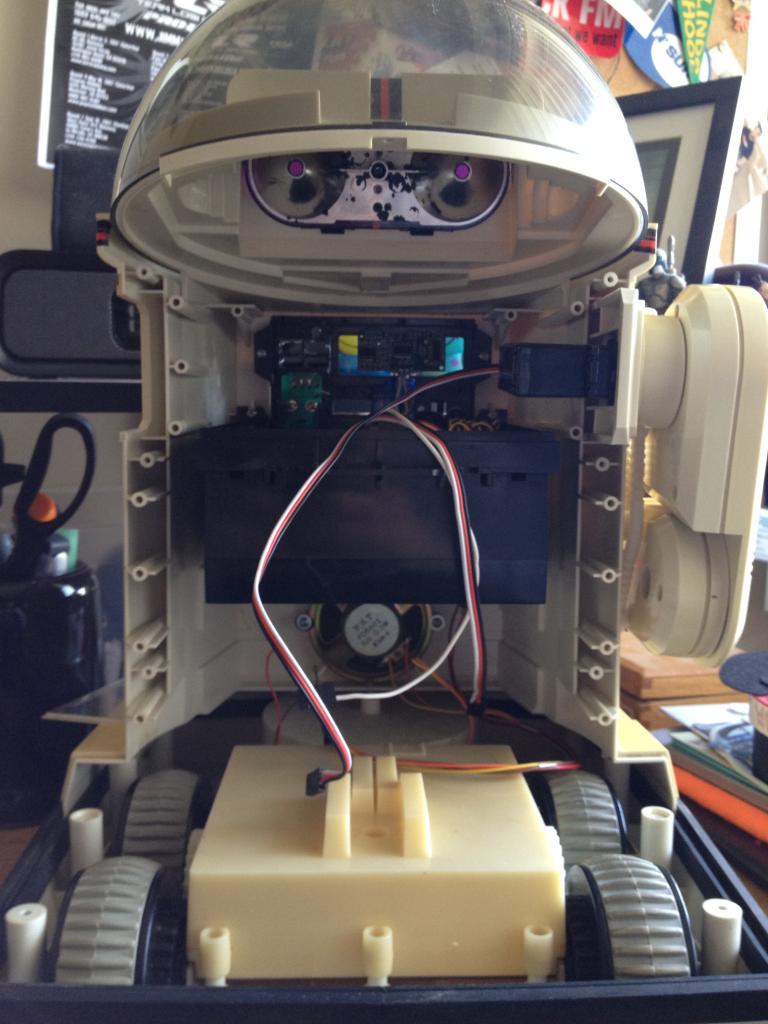
I was wondering about your base. On the Omnibot2K , it has two extra wheels. Yours seem to have a swivel and castor. Or did you put that on there? I would like to see more.
my omnibot has only 4 wheels and a single caster in the front. I think they added the extra wheels on the 2000 because the robot was taller and heavier. the caster isn't the most ideal design in that when the robot stops it leans forward on the the caster and then rocks back down to the rear wheels
Hi I have the same Omnibot model you have and I put some lead in the back to weigh it down and that stops the rocking motion. I got very frustrated with the noise of the motor drive and gears so I ordered some small metal geared motors and mounted these inside the drive box and threw away all of the plastic gears. They were virtually silent in operation but too slow as I got 40 rpm motors and really needed double that speed if not 100 rpm. So I'll get some others and try them but ideally the whole drive mechanism wants replacing as the front caster wheel is effective but primitive and on mine has a tendency to squeak as there are no bearings to speak of
Great job on yours
Wow i didn't think of adding ballast weight to the back... the lead is a really really good idea!
do you by chance have a link to the gears and motors that you used? I would be really interested in quieting down the drivetrain
The motors were sourced through Amazon Uk site the ones I used were 6 volt 40 rpm not really fast enough and need slightly more torque. The supplier in china is Hossen and you can get them on Amazon in the US. Or Solarbotics supply similar products just not tried them. Just needs a solution to either connect them directly to Omnibots wheels or via a gear mechanism. They are blissfully quiet though if I get sometime tomorrow I'll post a quick video of my Omnibot where I just glue gunned the motors into the drive box and connected them via the one gear to both wheels
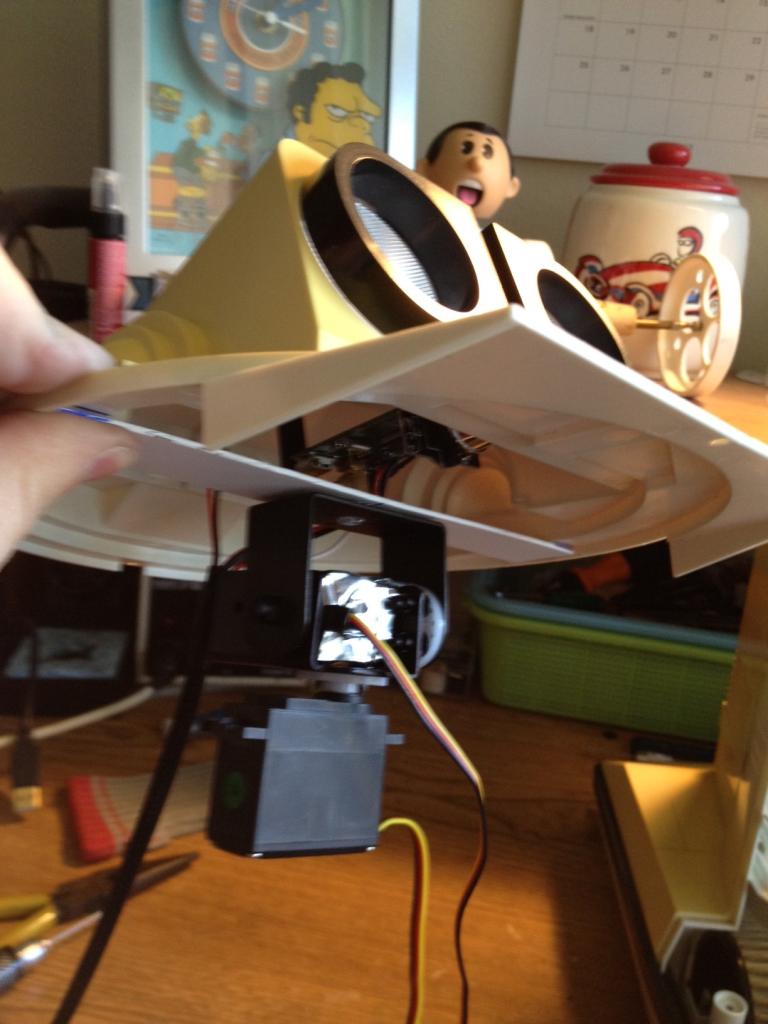
Updated with short video tracking to a red ball (must remember to video in landscape mode on my Iphone) The clicking is the servo driving Omnibots head
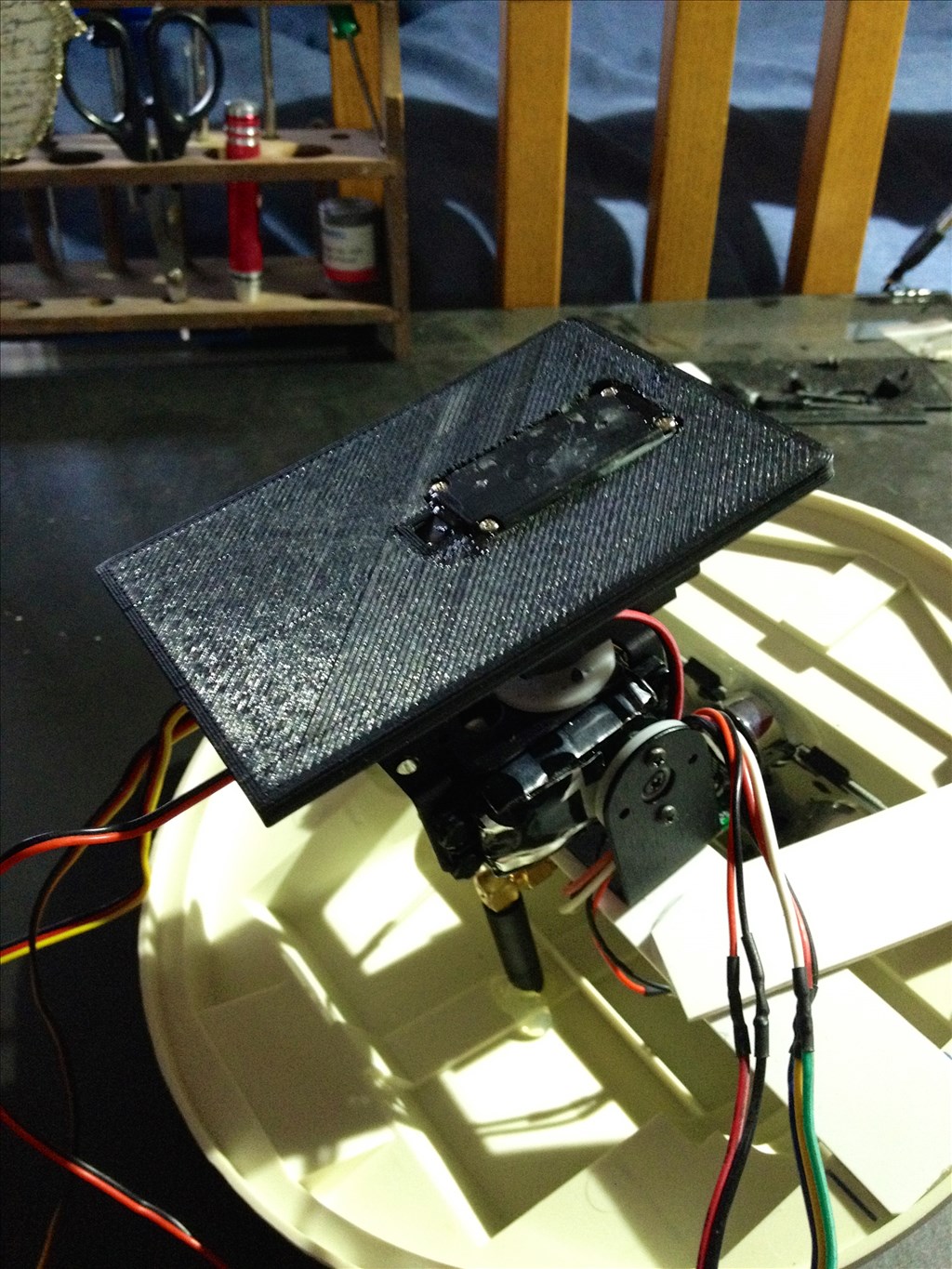
happy birthday to me! lol my Omnibot is constantly changing and being improved upon so hopefully i can get the hang of this 3d printing thing quick
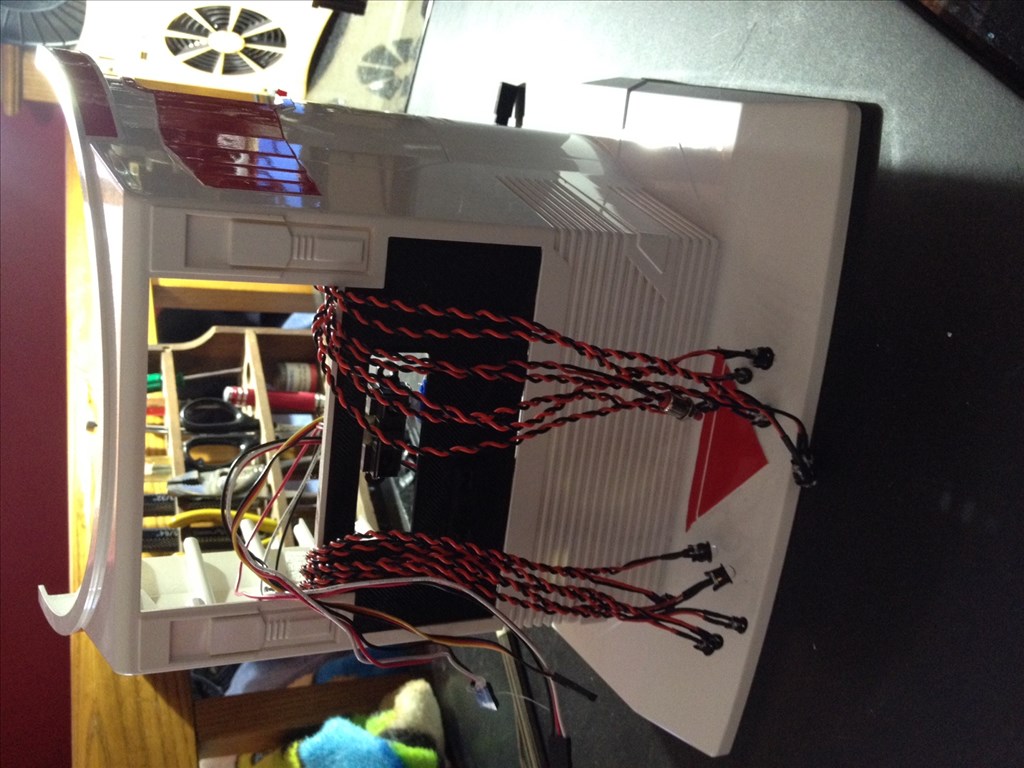
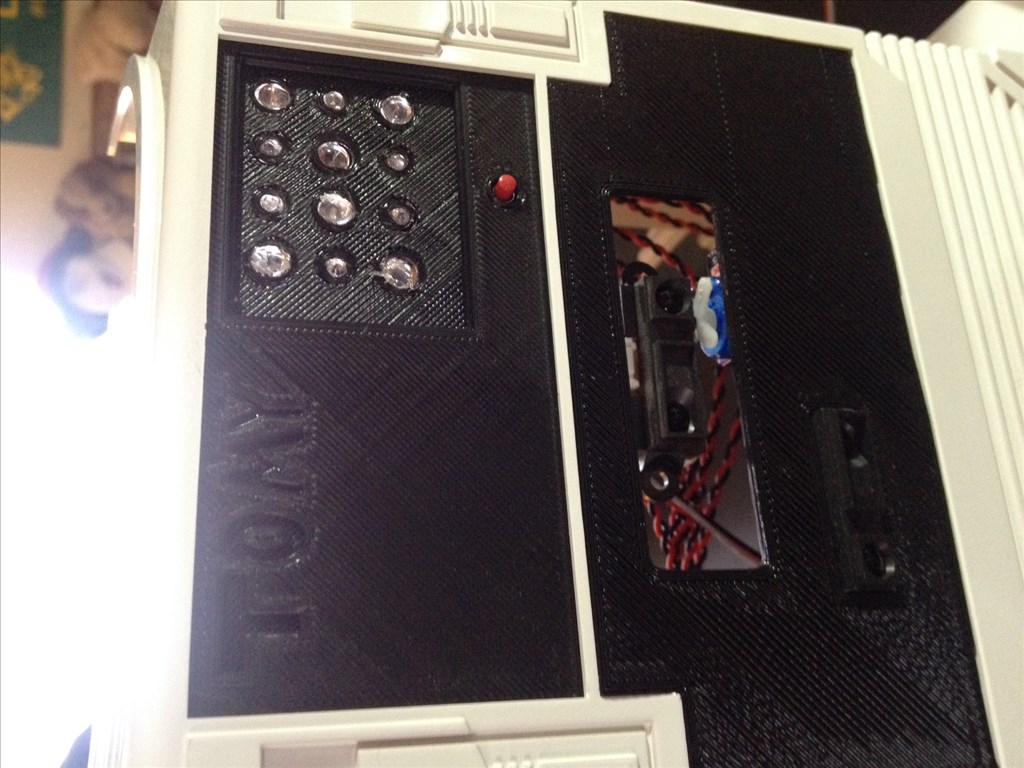
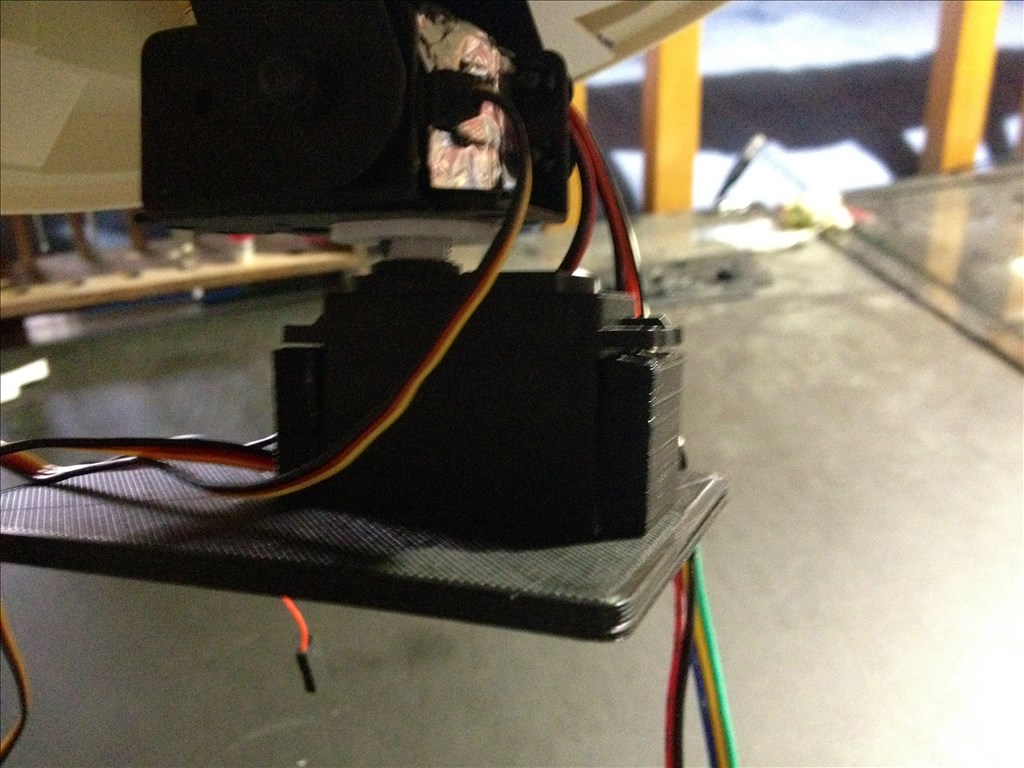
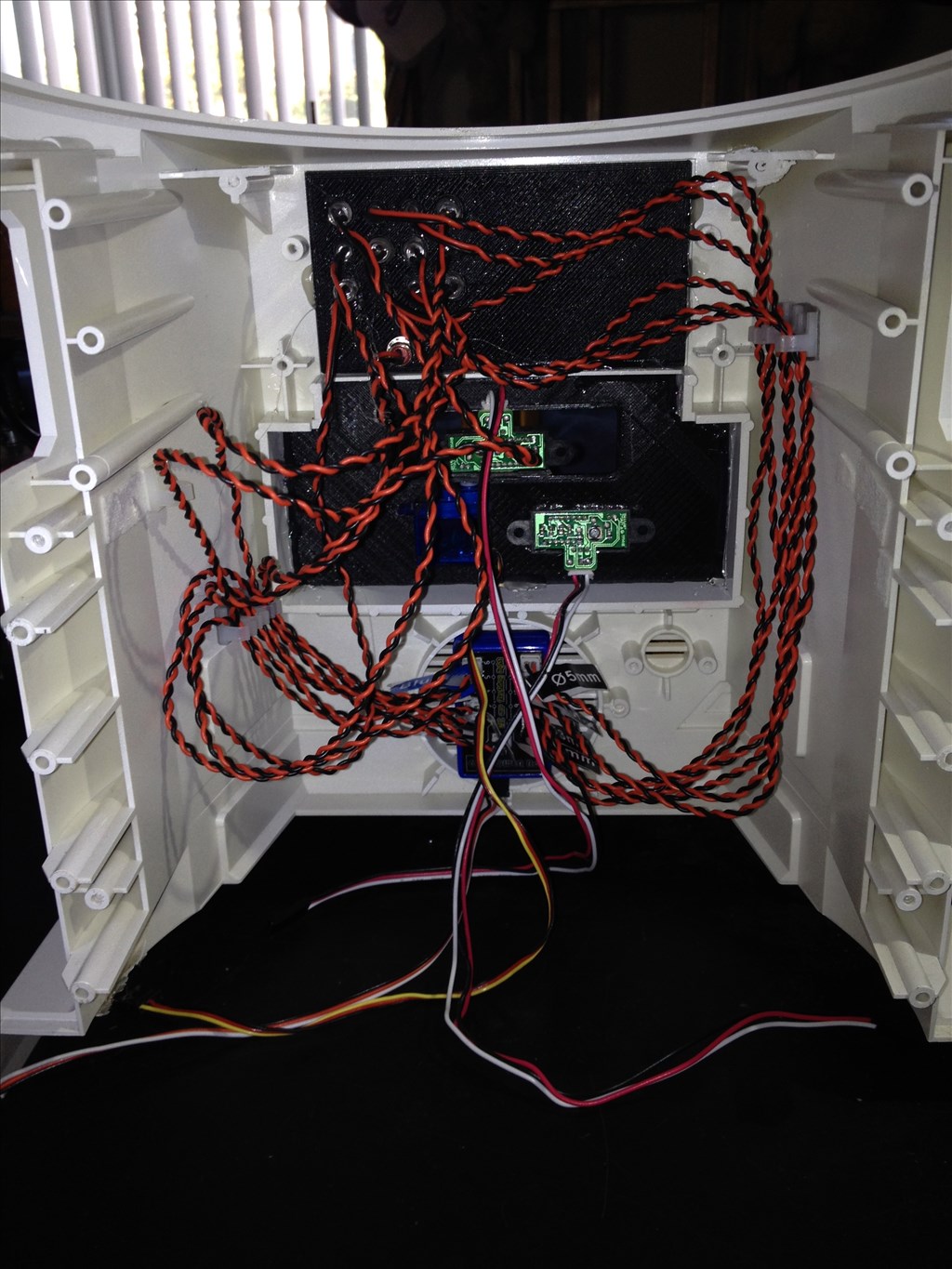
my first official print for my omnibot! I replaced the tape player with a panel that holds the sweeping and cliff IR sensors. getting rid of the tape player creates way more room inside of the body
I got the IR sensors all mounted into the front plate. now to figure out what i want to do with the upper opening