
-634836744289375000.jpg)
-634836744472343750.jpg)
-634836744677031250.jpg)
-634836744810468750.jpg)




-634686556725781250.jpg)
-634686557068906250.jpg)

-634680146761406250.jpg)
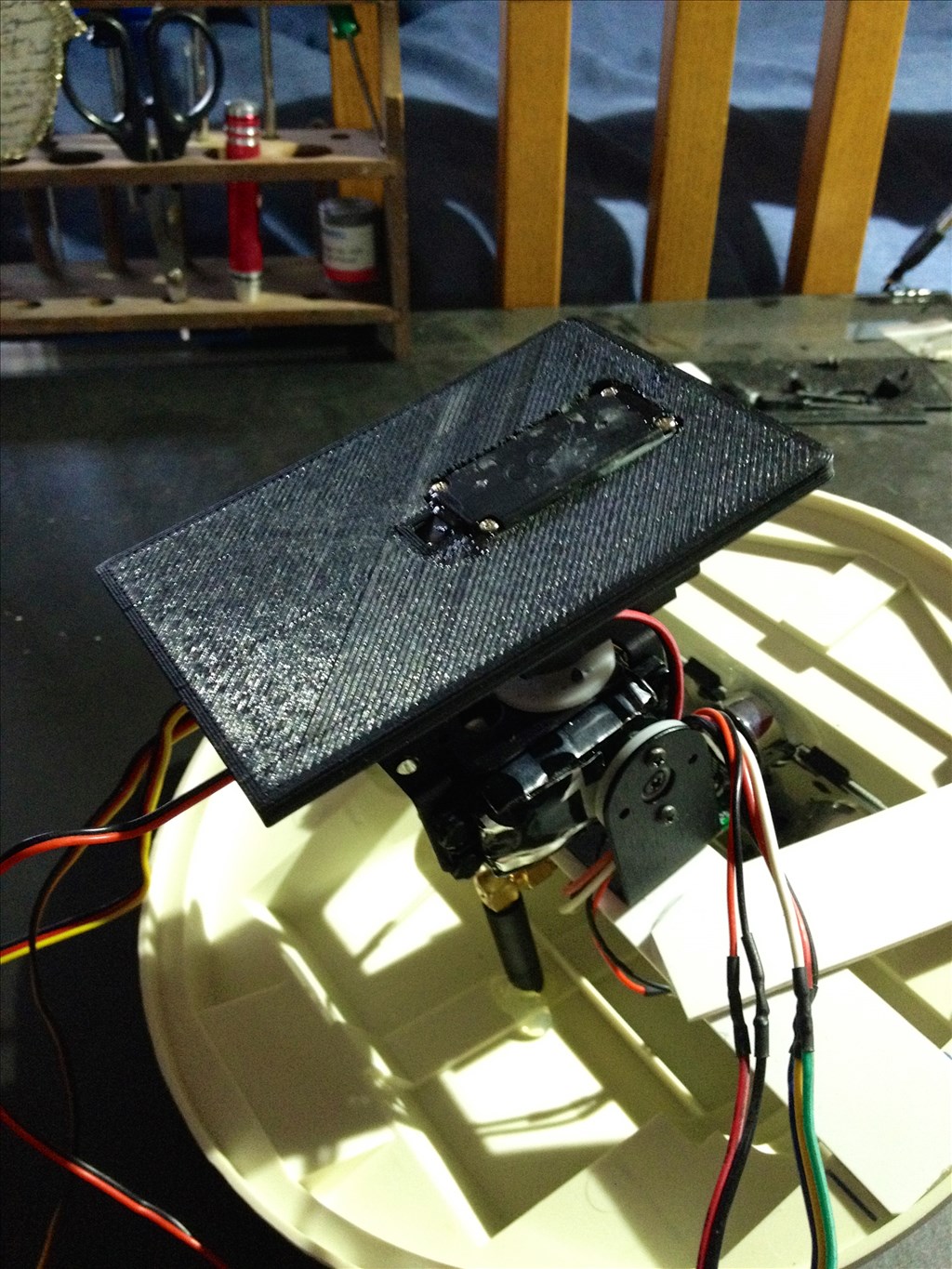


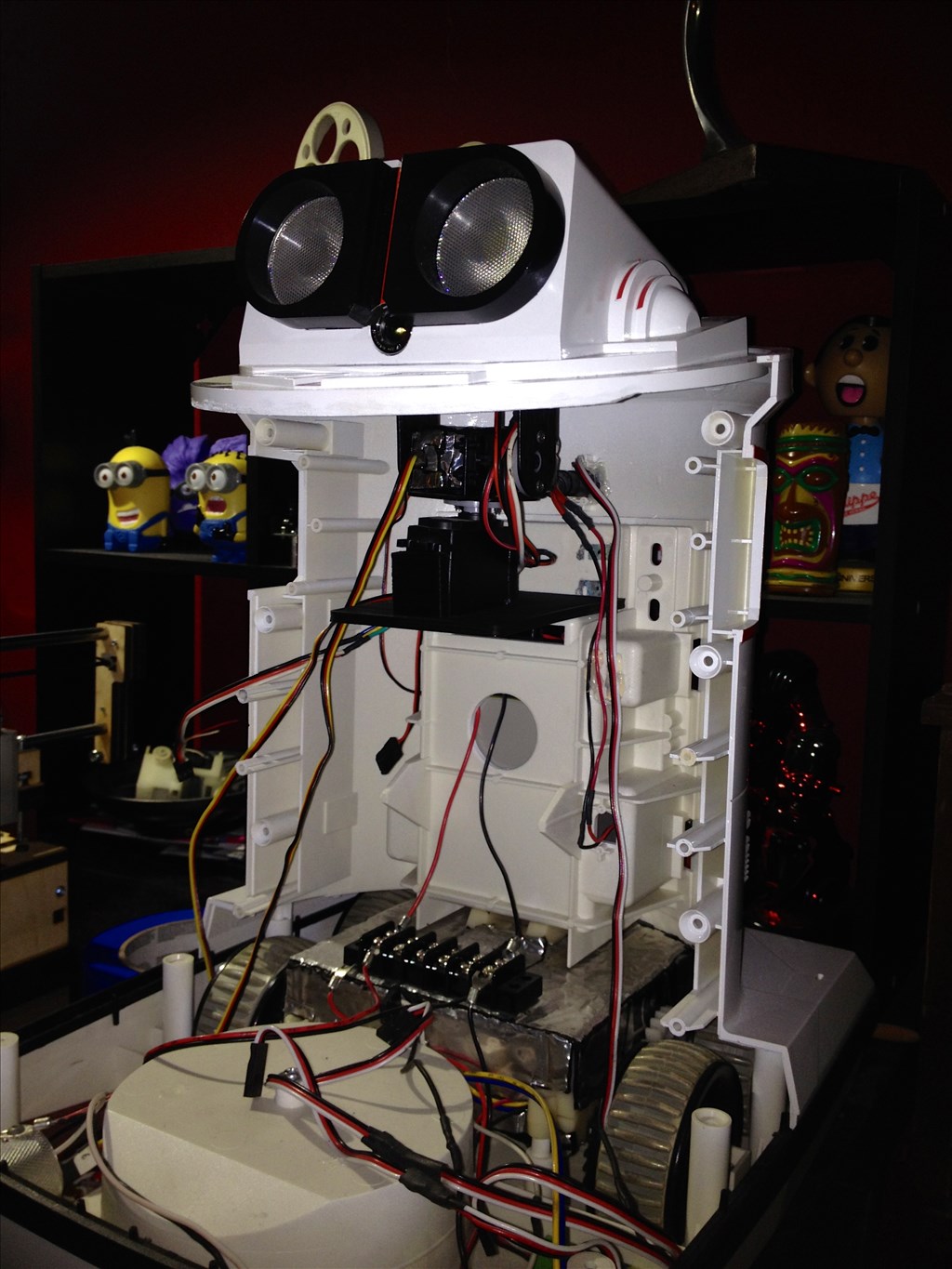

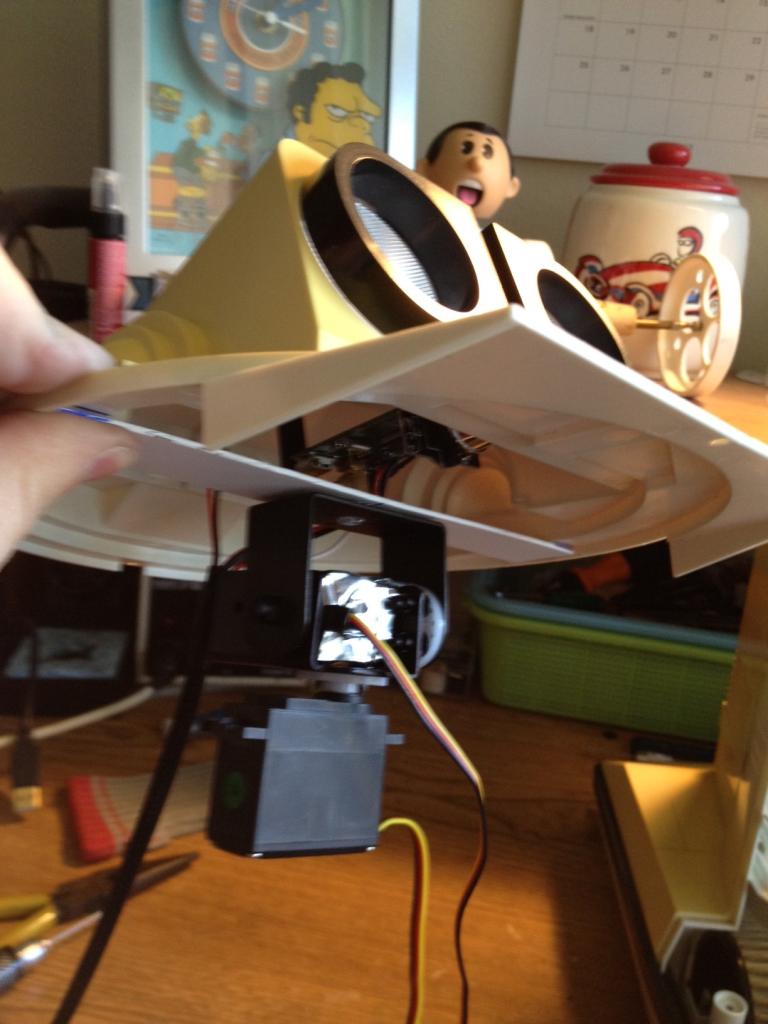
This is my Omnibot Tomy. I haven't really been able to work on him much, but I've been collecting a lot of parts. I have the camera working now, even though it isnt mounted yet. The radar and corresponding servo is working well. Still waiting for Dj's motor controller to come back in stock to get him moving around. He's definitely a work in progress that I'm taking my time with. Im going to leave him yellow. I was going to paint him but the faded and dyed plastic actually kind of grew on me.

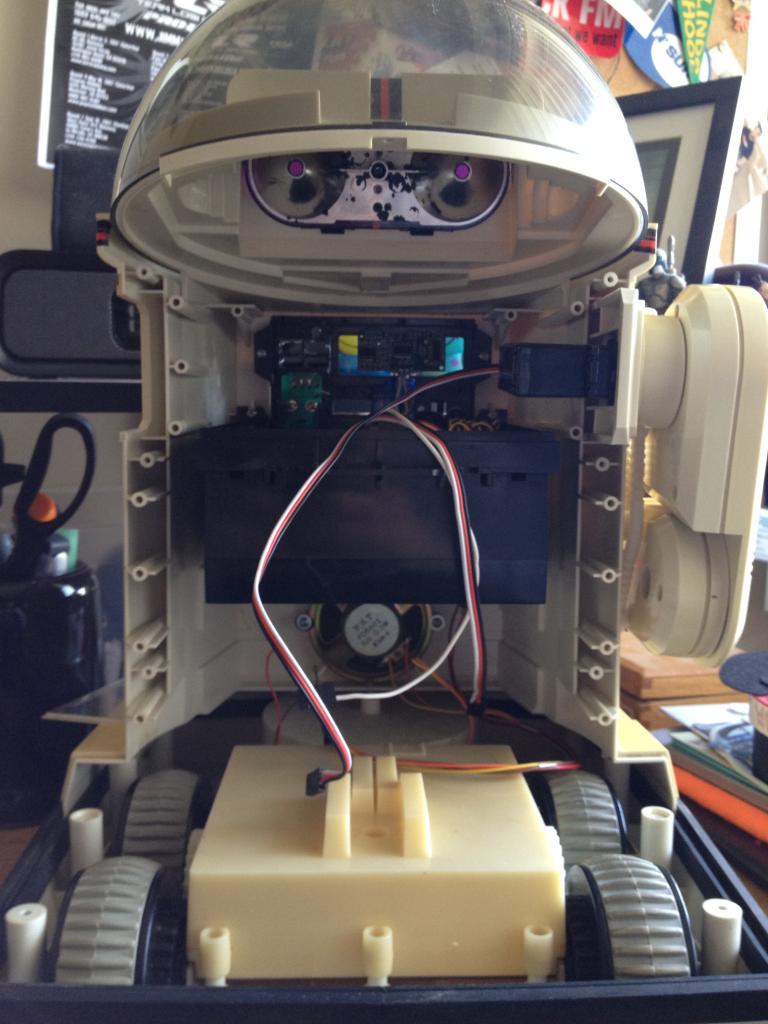


PS he has the other arm.. its just in pieces at the moment...
I resolved the camera problem that I was having earlier. Now however, I'm having trouble getting the ezb to connect to the computer. If I open a new project it connects just fine but then eventually has the same problem. I cant seem to get the ezb to connect while in my projects folder. Do you think its a problem with my blue-tooth or how i am formatting things? Any suggestions would be great.
Thanks Aaron
Discover more robots

Markthebotbldr's What Should I Name This Robot?

Steve's Captain Proton Startrekvoyager Tribute Robot.


mmmm!! you have to add Your Ez-Robot in the part of bluetooth devices on windows.... later you have to try in all COM Ports in ARC!,.... Good job!! Good Luck! I hope a video
(sorry if my english is bad :/) (I try to Help this community
I think he is looking great! Keep up the good work.
I like the fact his dome looks perfect and the rubber tyres are in good condition as well. I used a Sparkfun H bridge for mine works great but takes 4 EZ-B Connections
Keep us upto date with progress looking good
Hi Aaron, I tried out the spark fun Hbridge, but I used it with PWM control and eventally it blew up I then found this to run my track bot with 2 motors:
I then found this to run my track bot with 2 motors:
VEX motor controller
I had to buy 2 (1 per motor) but they are not too expensive and have held up great so far. I use them with ARC regular servo control, so you can get PWM control and best of all it only uses 2 ports on the EZB board. P.S. I did run them off of the EZB power and found the heat sink got warm, I have since switched to using to half amp regulators (1 for each controller) and have no heat issues.
Hello everyone
I've been doing a ton of work on my omnibot the past couple of days! I was also able to order the 2.5 amp h-bridge from Dj so I will be wiring it up as soon as it arrives. I will post some new pictures of my progress tonight when i am home.
I am still having a problem with the connection of my ezb. I have had to open 3 new projects and redo everything because I cannot seem to keep it connected. If I accidentally disconnect it with the power on, or the batteries are low, or it will disconnect on its own. Then I will try and reconnect with the board but it never will again. And the connection button becomes frozen. I will open up a fresh blank document and it will connect again like normal. I have tried re-installing the program and disconnecting all the wires to the board itself and trying to connect to the file again but it still will not reconnect again. it is almost as if something is corrupted with the specific project file. I really don't want to keep starting over again on the programming lol
Does anyone have any suggestions?
I will be posting new pictures of my progress soon!
Thank you Aaron
I think the easiest way would be to zip up your project and have someone try to open it and connect. That would verify if it's your project file or something else on your computer.
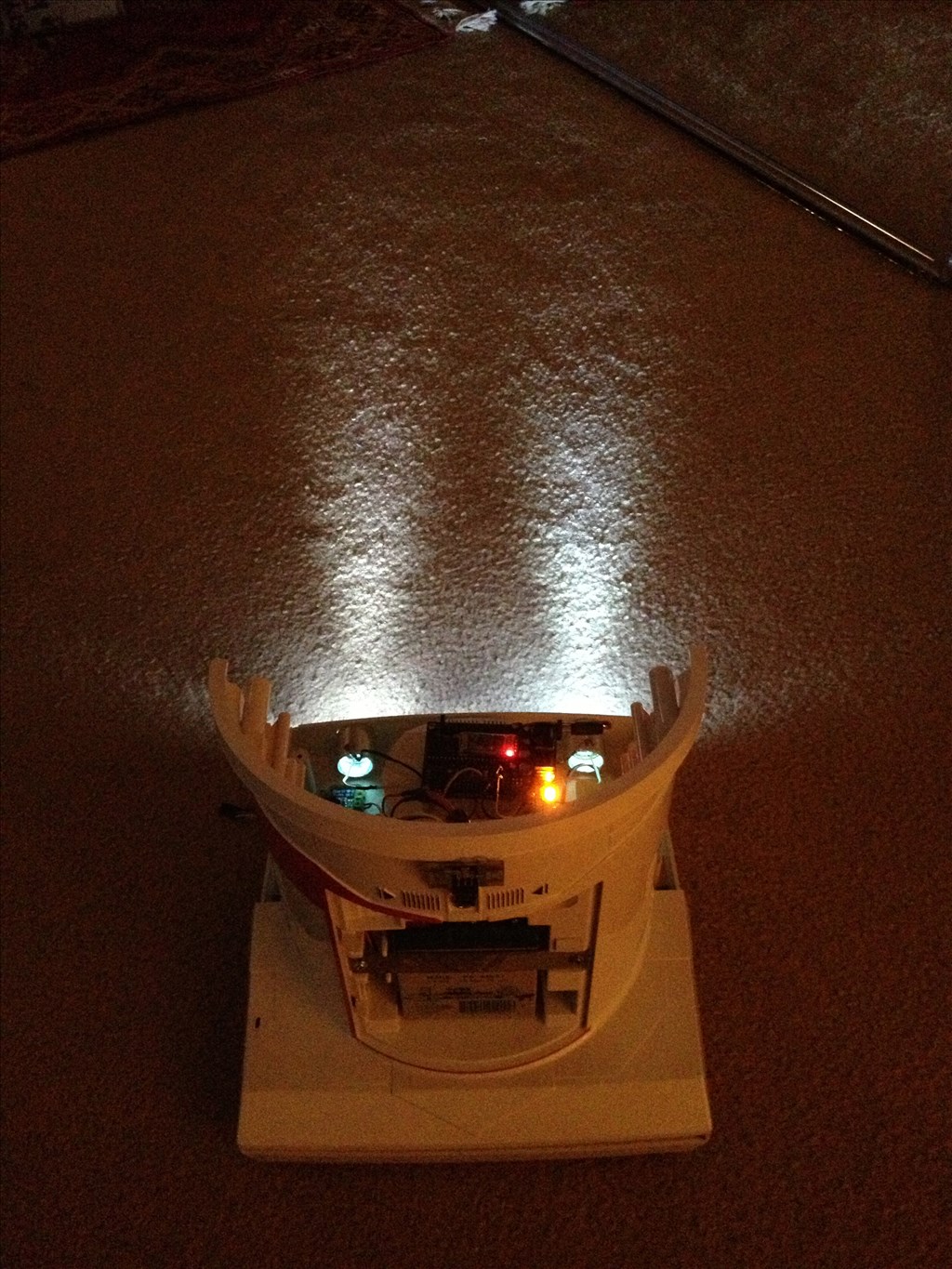
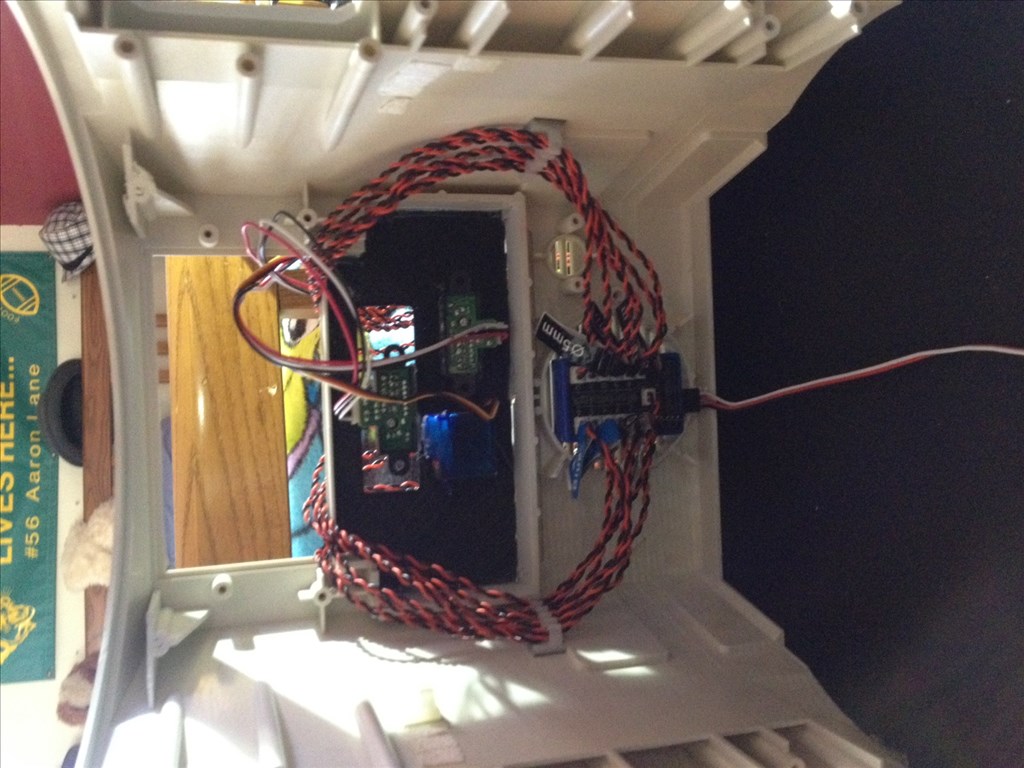
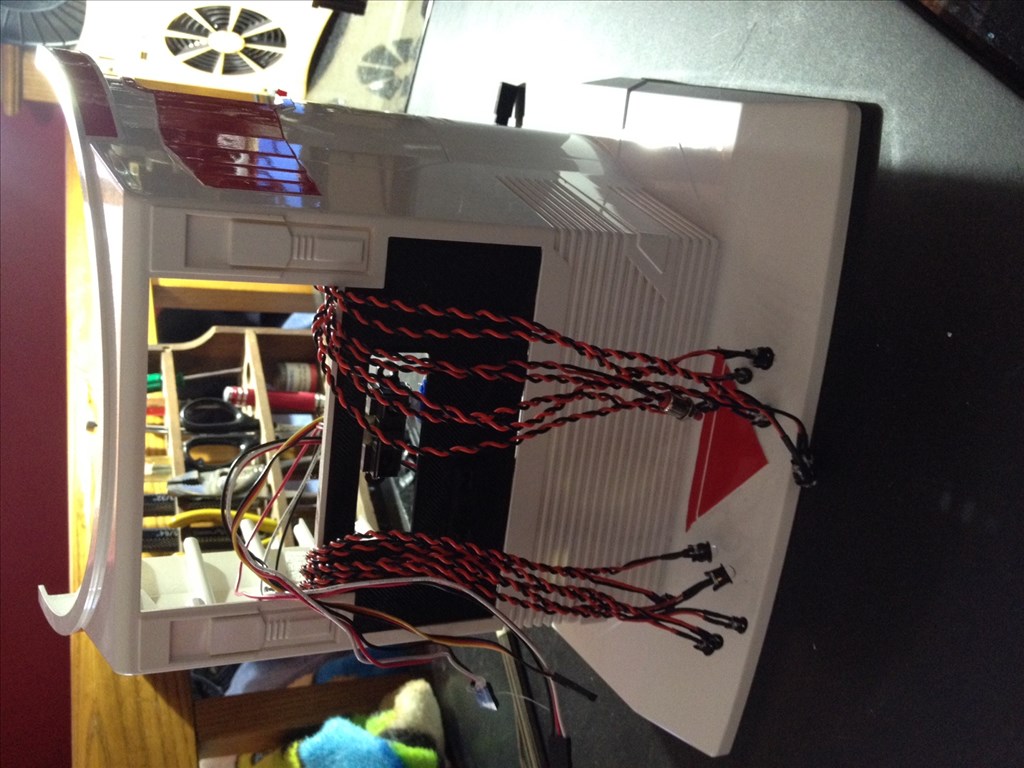
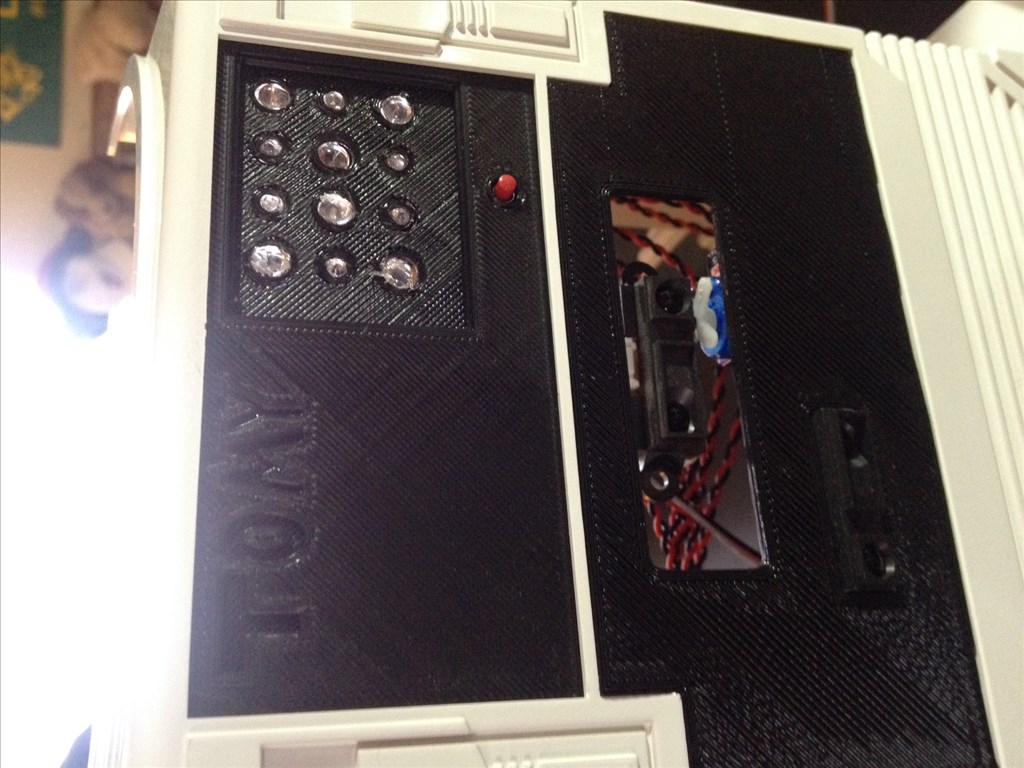
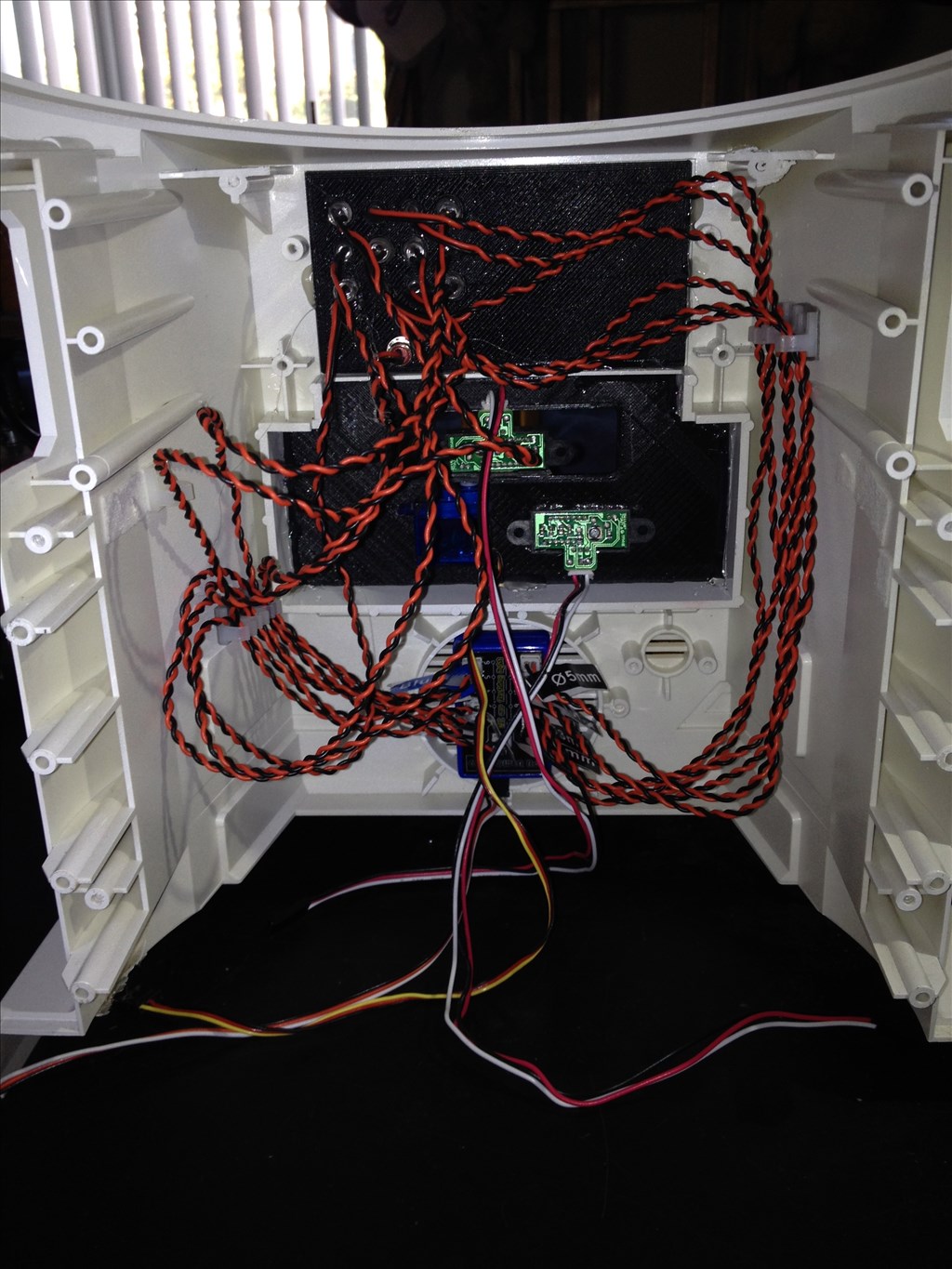
Here are some new pictures of the progress i have made. Hoping the video of his front scanner light works
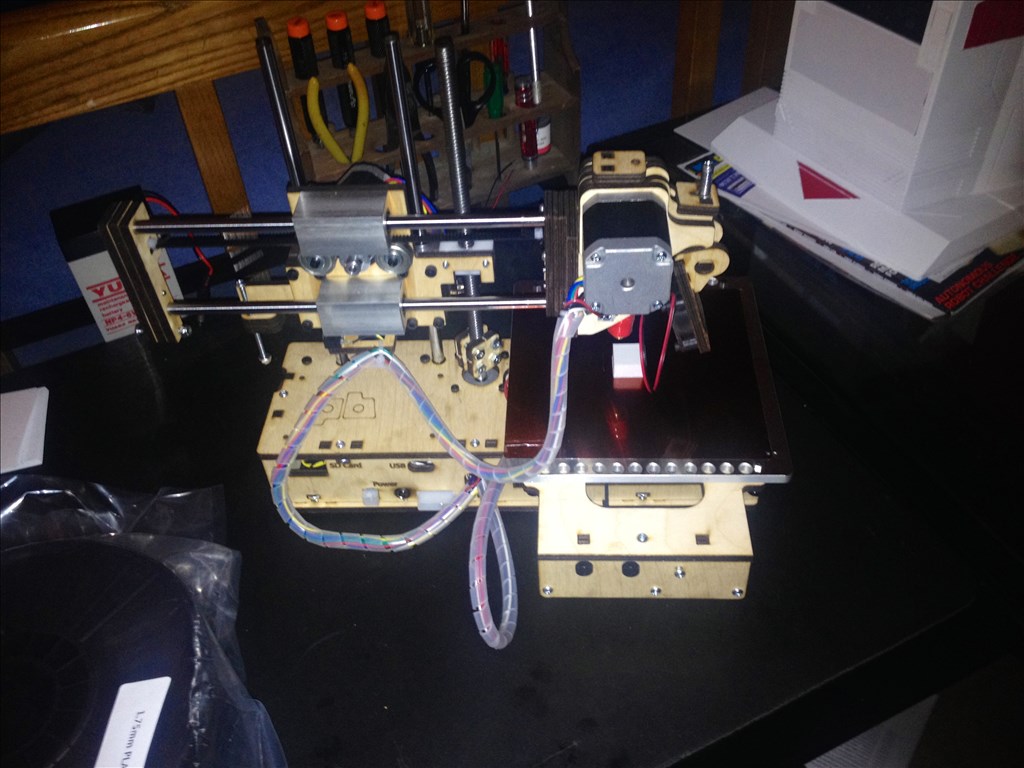
Today during my lunch break at work I decided to run to my favorite electronics store and buy some more goodies to continue fine tuning Tomy's wiring.
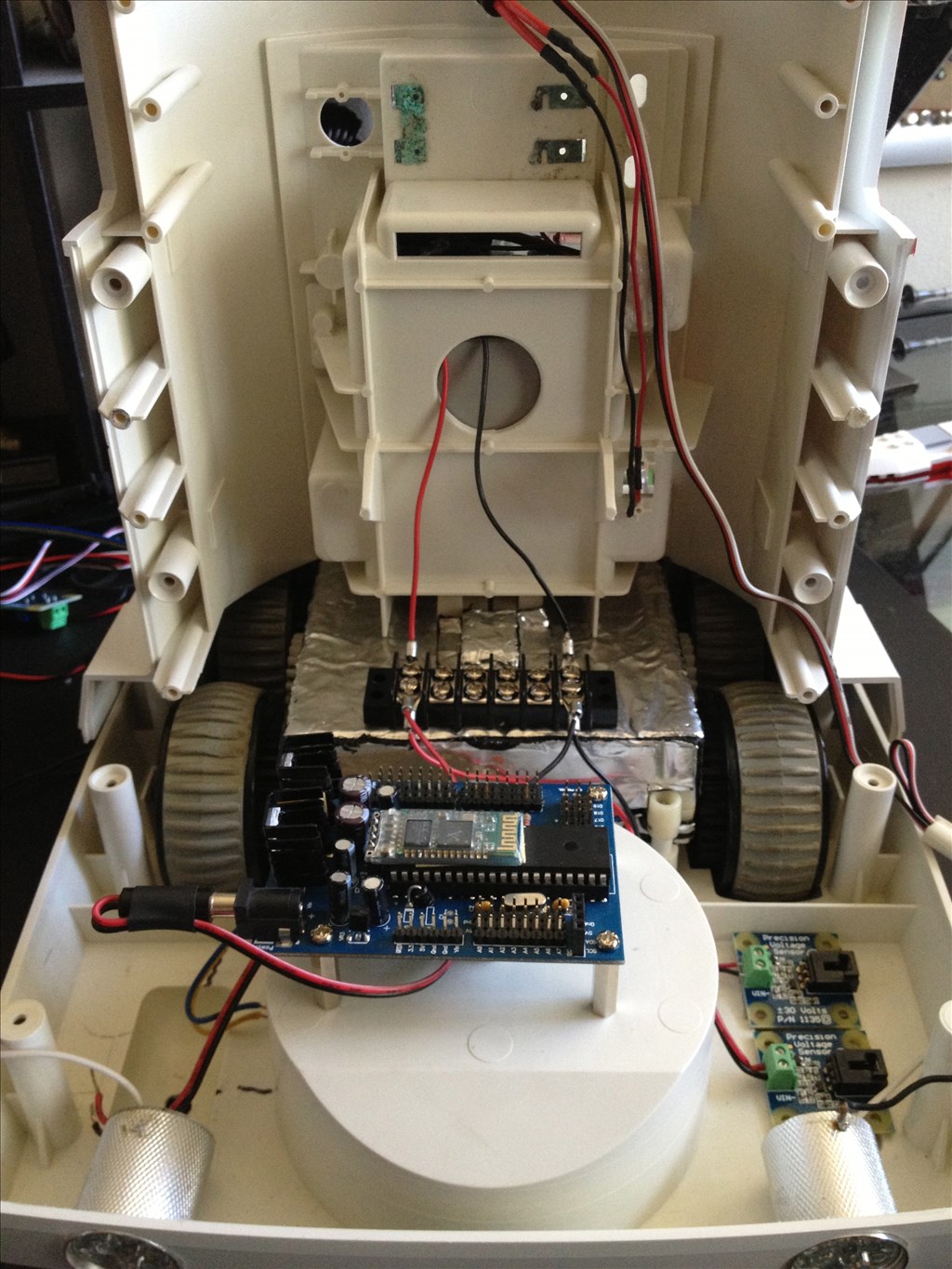
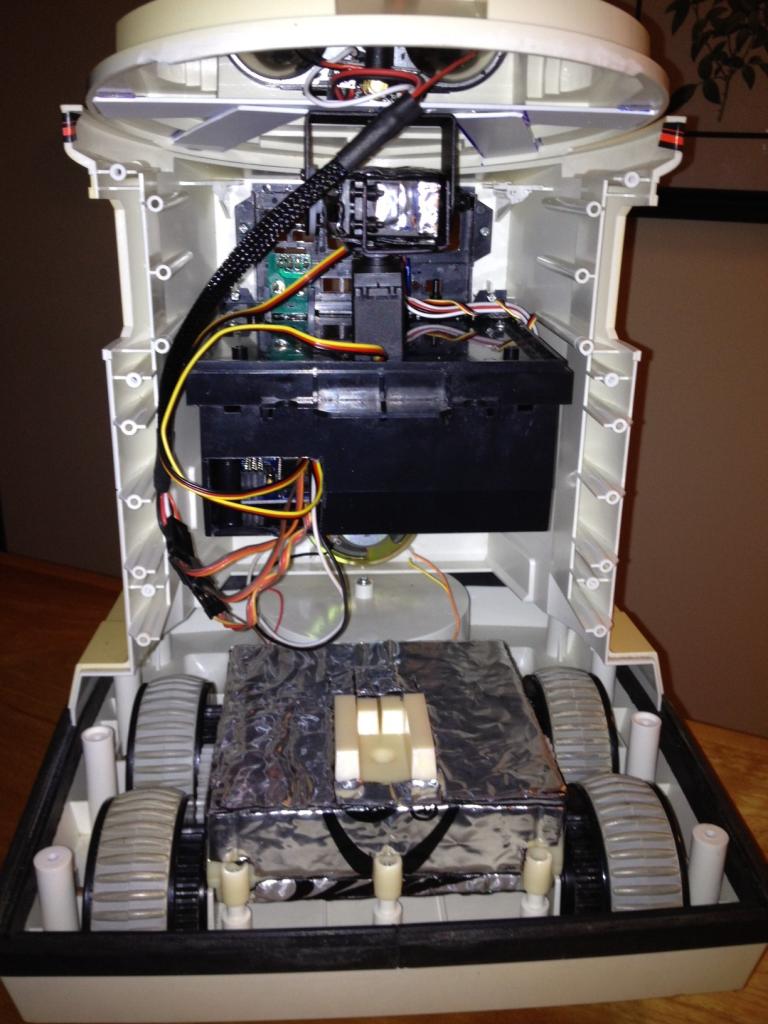
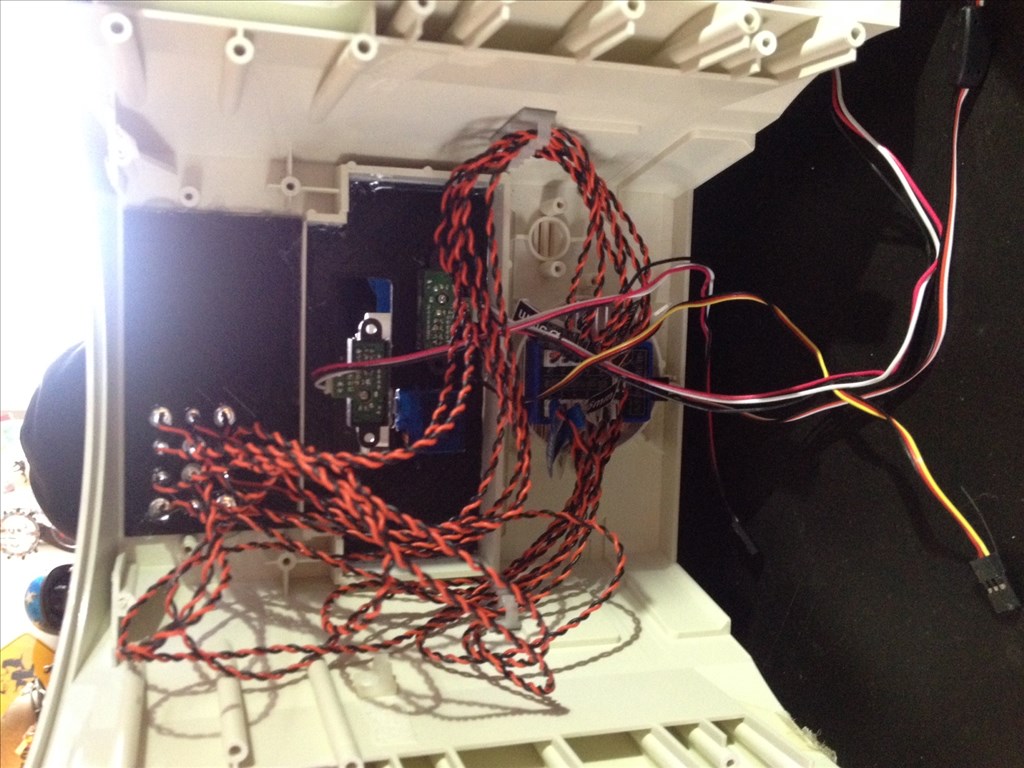
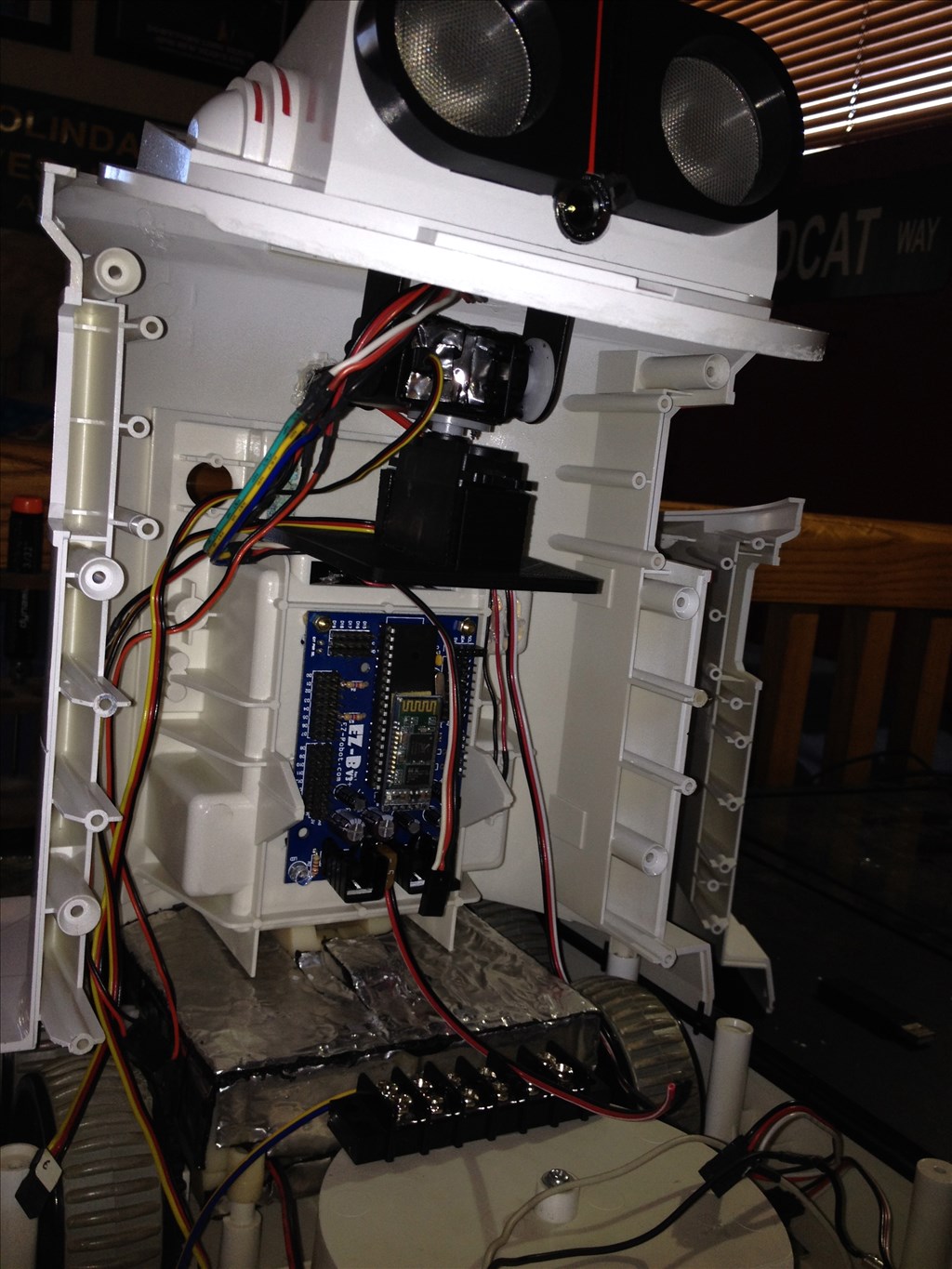
The ezb will be put into the front tray like in previous pictures, but i had to take it out for easier access mounting the motor controller. I still need to drill and mount the IR sensors on the front corners for edge detection. The board will get put back in the tray once they are mounted and the front gets bolted back on. I changed the wiring for many of the components and decided to try and use a breadboard to distribute power.
Here are a couple pictures for some of what I had accomplished tonight: