

For quite a few years, i've been mentioning that I have been working on a positioning system for ez-robots. I guess it's time that i share my tribulation with you, because the trails were far too many . Should be ready to throw in the manufacturing facility for this summer's scheduled releases
. Should be ready to throw in the manufacturing facility for this summer's scheduled releases
By DJ Sures
— Last update
Other robots from Synthiam community
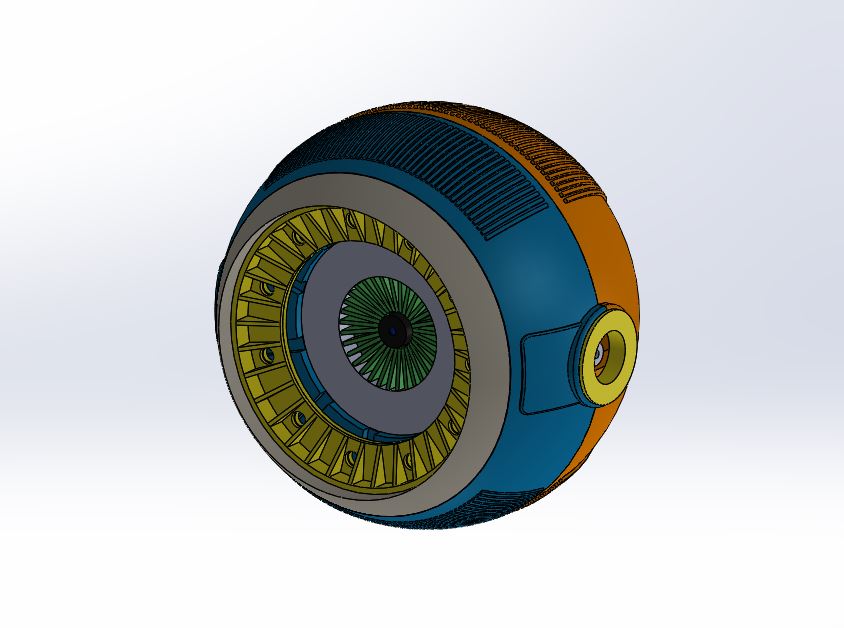
Perry's Scratch
Gimbaled eyepod 'Scratch' with EZR camera, NeoPixel iris, servo X/Y gimbal and 3D-printed belt/pulley cross-mount for...

Nallycat's Cog A Social Interactive Robot
Custom Zoe robot head with added mouth, standard metal-gear servos and EZ-Robot V4 controller, camera and illuminated...

Ellis's Halloween Robot
Robot Max and helper Tele featured in a YouTube upload after earlier loading issues.

D.J. Thanks for the additional demos . I have been thinking about this IPS and have an idea to share. First, I want to share with you my motives for the sugestions below. I am blind and handicapped. I think robotics can help us and many others. Your IPS relies on a given area being set up with fixed IPS sensors or a portable sensor set up and then confifured prior to the system being useful for the blind. Now concider this idea. Let's revise the location of the IR beacon and the IPS sensor. The beacon sensors can be very low cost and can be purchased in large quantities . These can be placed into any room that a blind person enters quickly. Having the IPS sensor either affixed to the person or wheelchair will then offer the following features: 1 It will provide instant obstical detection in the immediately area. 2 by finding a IR beacon which has been affixed to a wall ETC..., it then can pervade your full IPS software features simply by having you reverse in software the default positions of the beacon and IPS sensor. 3 as the person moves into areas that are not mapped, any previously mapped prohibited objects will continue to be off limits as the map "rolls" to adjacent areas. 4 This would allow your robotic offerings to now enter an additional market segment.This blind and handicapped features would be unpresidented in situations where the person must be outside his or her normal environment. An example of this might be a hospital room, hotel room,conference or study room.It could also be useful when a blind or handicapped person tries to navigate around a food store. We could add the location of a persons favorite foods to the map. Please let me know your thoughts. thanks Neil
Those 2 new videos are very informative and what a wonderful new hardware and software plug in. I am actually supposed to be working on other stuff on the Internet but this IPS system has all my attention and I just keep wanting more info,LoL!
@antguru
That is a great use case. I was thinking about making a similar suggestion of having a beacon on a person and the robot able to have the sensor so that the robot can follow the person with much better positive recognition than color, glyph, or face (better range, less error). Your idea takes this from a personal desire to have a robot that can follow me like a well trained dog to a whole new market segment (although having an assistive technology robot able to follow you also fits within that segment).
Even if this is not something that can easily be adapted from what DJ has done with IPS, it is something to get the thoughts flowing on how we could achieve it.
Alan
Yes this could be great to get the robot to follow us around the house or possibly in the future adapt it for outside or anywhere. For now, I am just happy that it can locate the doors and not hit any furniture! Alan, it reminds me of a great recent movie "Robot World" --A pilot is sent across the galaxy through a new device. His mission is to orbit and reconnoiter a planet before returning home. The planet is known to be populated by intelligent life. Once at his destination,the pilot becomes marooned on the alien planet and soon discovers the planets only inhabitants are predatory machines. " Ha ha...great film and the robots do exactly as Alan suggested they follow the pilot with his luggage like a military work horse.
I am wondering if the beacon can be put on anything that moves? Does it have to be on a robot with a movement panel? If not then perhaps it could be attached to a person and work as Antguru suggests. We need more input from DJ on this.
I could also see it working, although in a more limited fashion, keeping the stationary sensor, but being able to recognize multiple beacons, where you tell the robot to always follow the other beacon at a set distance. With enough different ARC instances and distinct beacons you could do some interesting coordinated actions between different robots.
Alan
I am glad that some of my thoughts are valued. However I need to make one point quite clear. For this to work for a blind or handicapped person, the IPS sensor must be attached to the person or wheelchair. The beacons which can be very low cost and light in weight can be purchased in quantily and affixed were needed very quickly. This would not be the case if the IPS sensor was mounted permently . Imagine a blind person walking around without a blind cane,just by wearing a special head cap. of course we would know that in the cap would be the IPS sensor, and attached to the TINY controller which is part of the IPS sensor would be a audio output or morse code beper .This audio output would then warn the person of objects and best route to desired waypoints.
Also, Multiple selectable beacons could allow the sensor to drive a handicap scoter or wheelchair to a location by a verbal command? Beacon at specific locations with the IoTiny control portion of the sensor on the vehicle operating motors?