










Hi Gang ! So Ive finally got my project to a point to where Id like to show what I have been working on, which I actually started around october of 2019. Its still ways off from being finished, but I wanted to show you the major part of it.
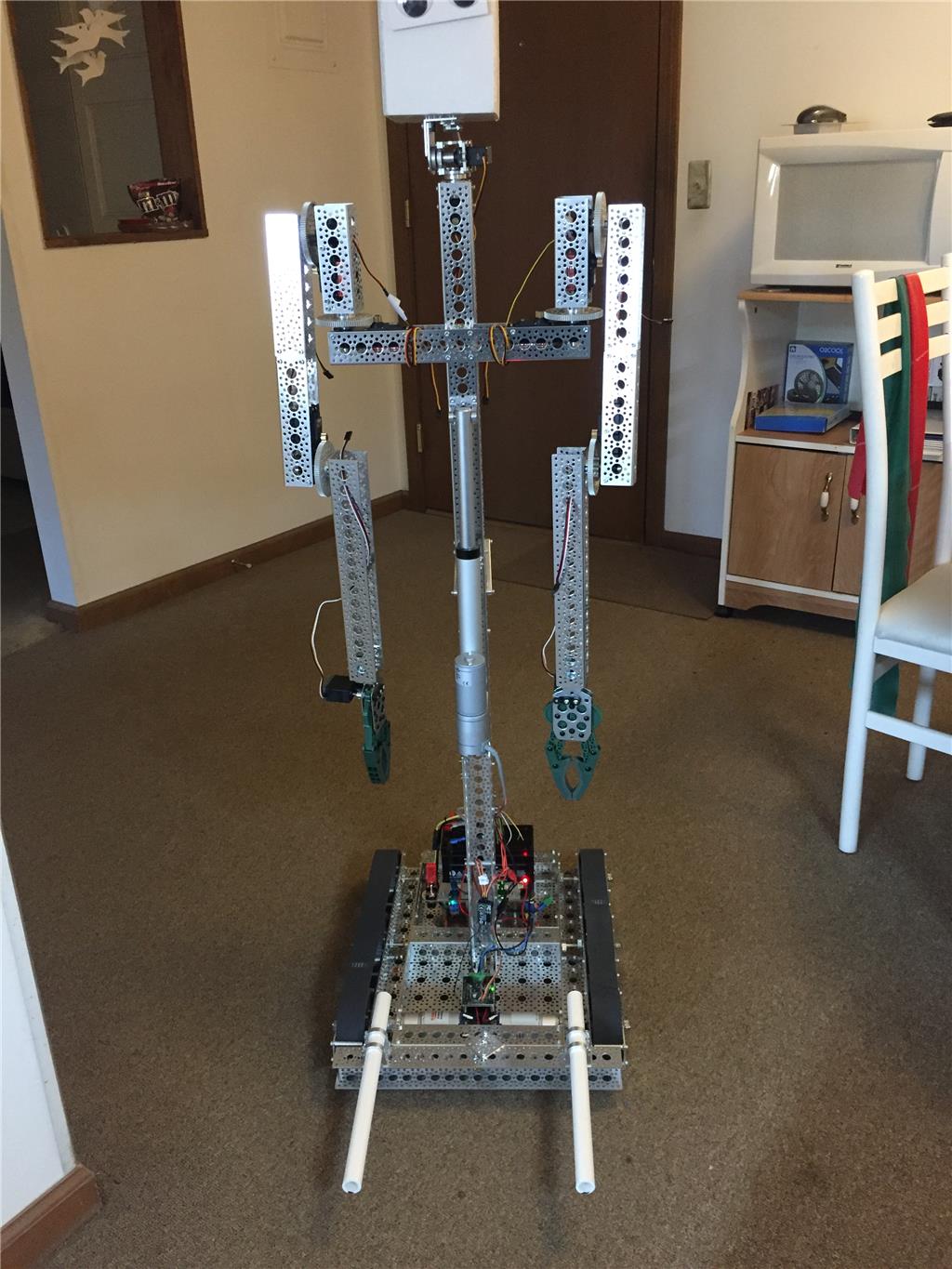
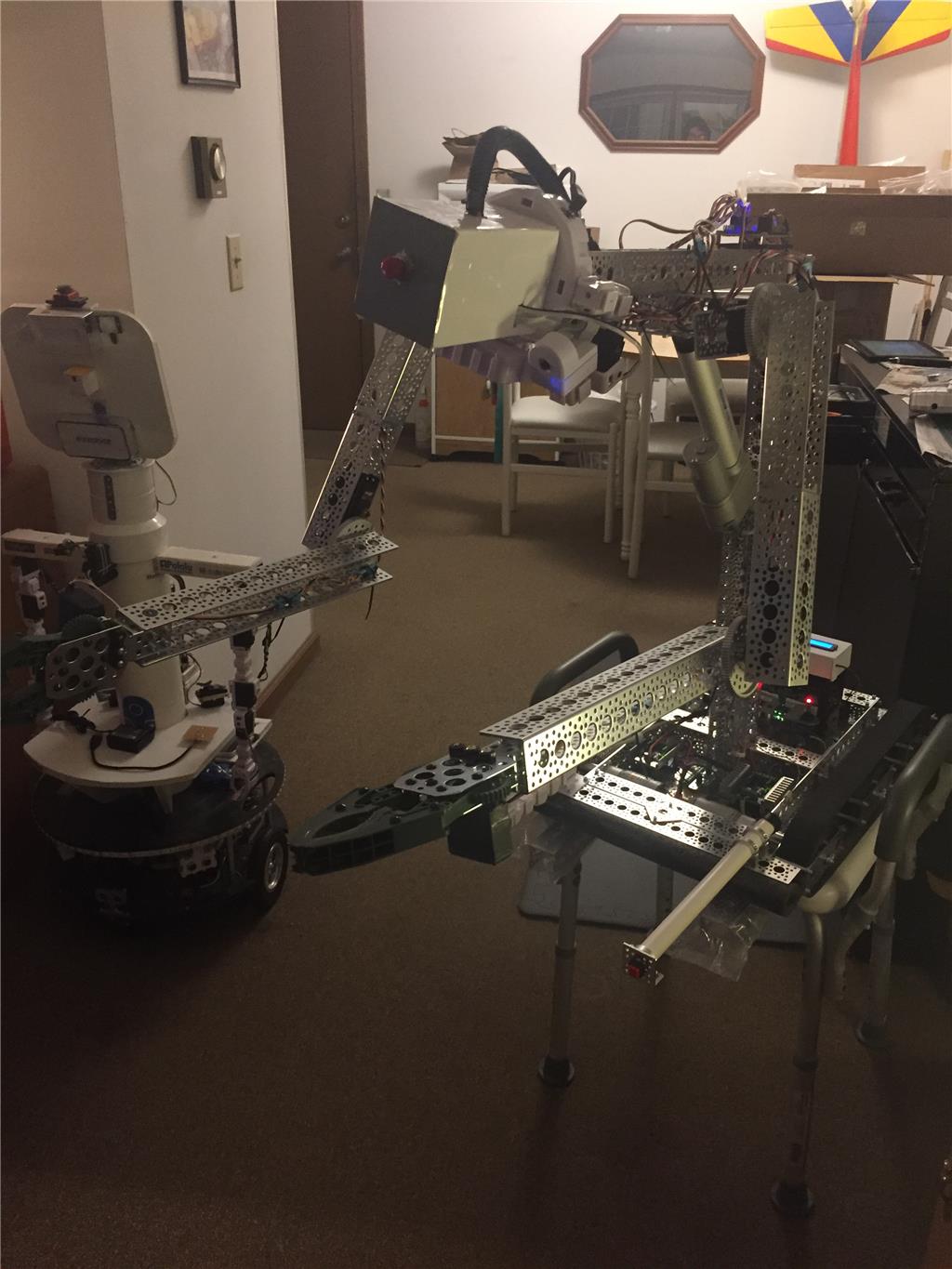
This design stands a lil over 65 inches tall. Currently weighs in about 40lbs. Is mostly made from Servocity Actobotics metal parts and some very high torque servos (3402 oz/in), a torso actuator(180lb thrust) ,Vex grippers and much more...
The main goal of this design is to help lift a person up; as in from a sitting position from a chair or wheelchair ,turn, then lower the person back down onto another chair (they call this "Transfering" among the nursing community). I got the idea from all the times that either me or an aide/nurse has to lift and move my mom around in her home. I know that there are lift chairs out there than do this, but I want to see if a real robot could be built to do it too.
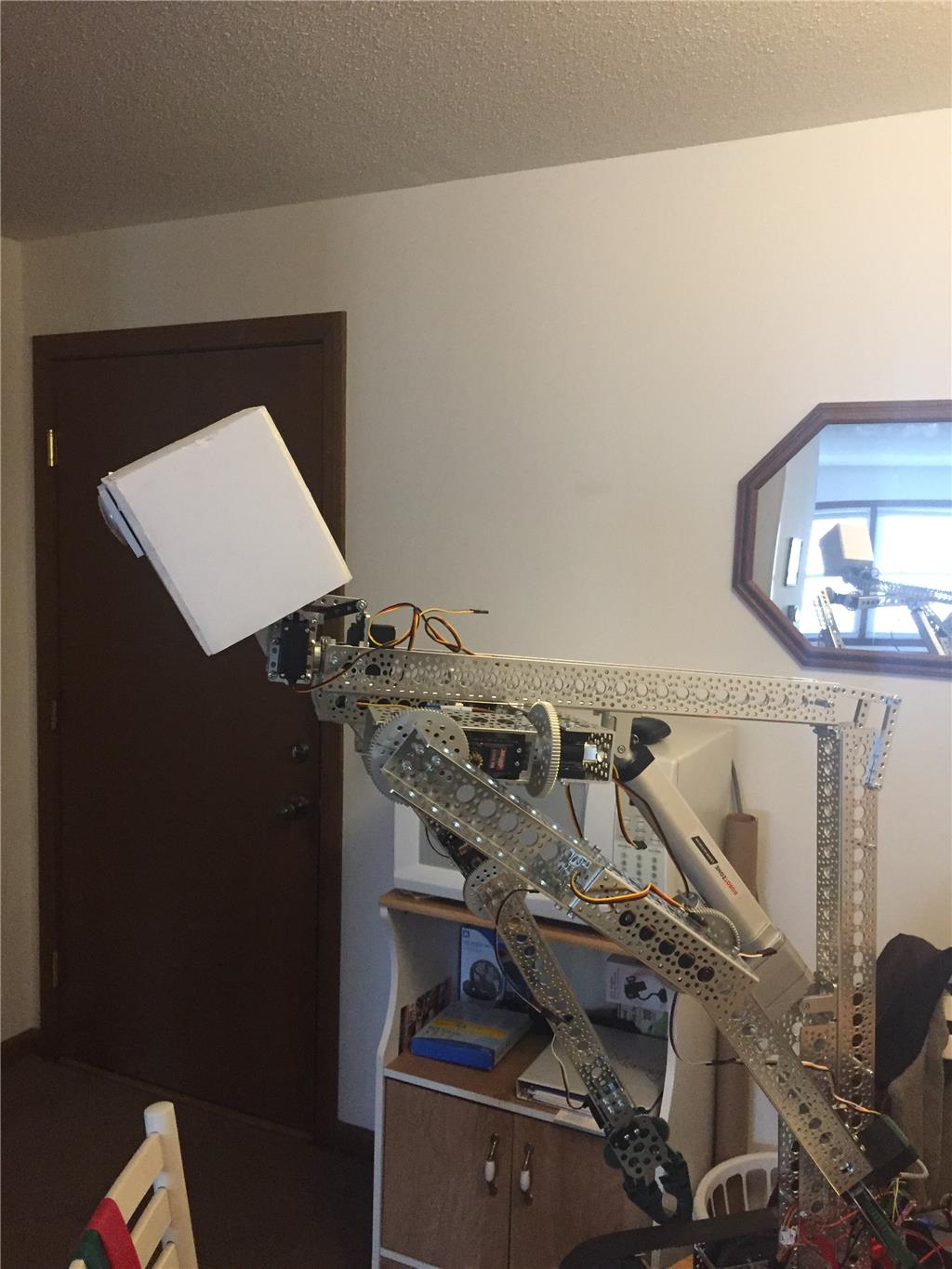
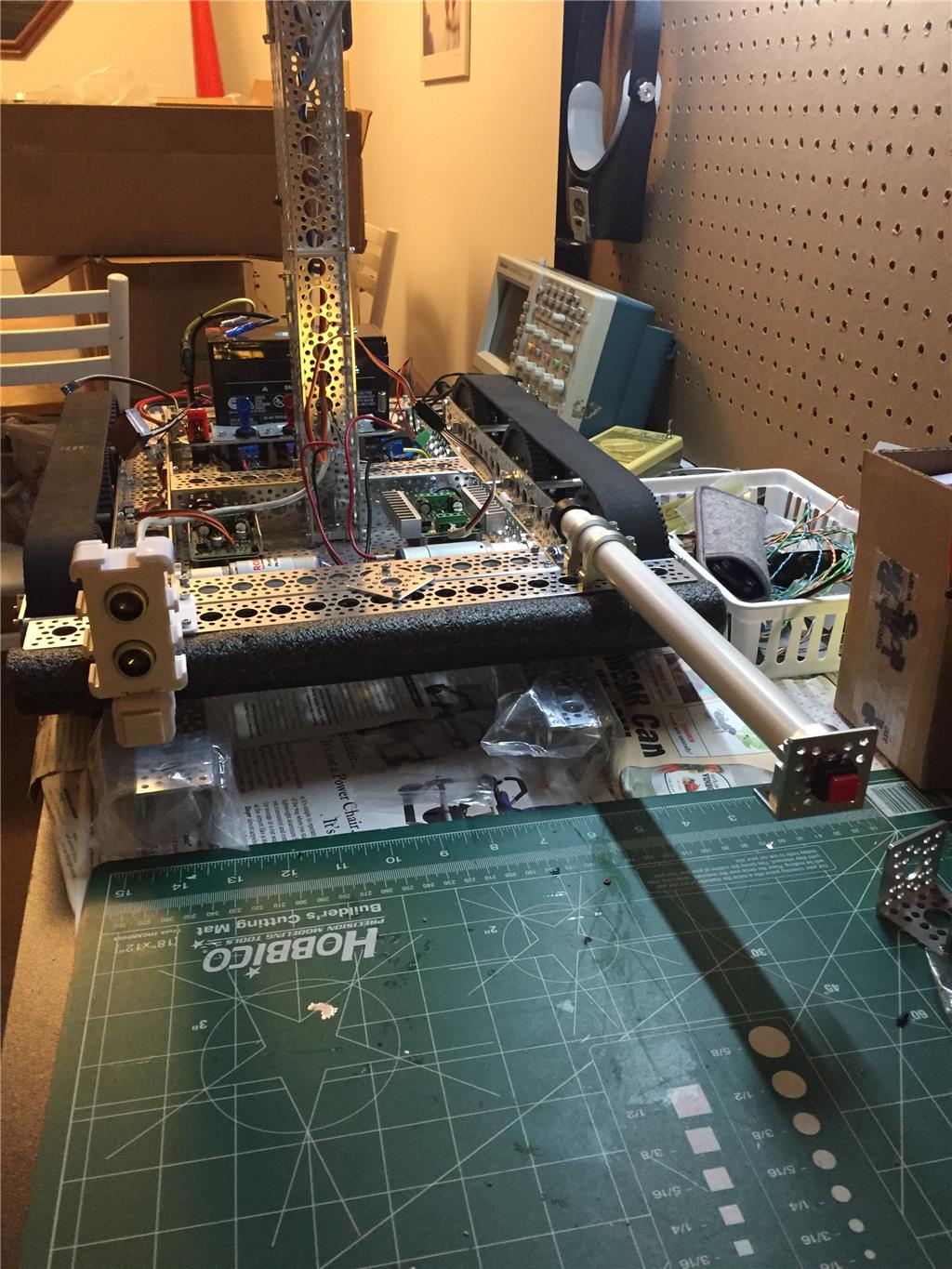
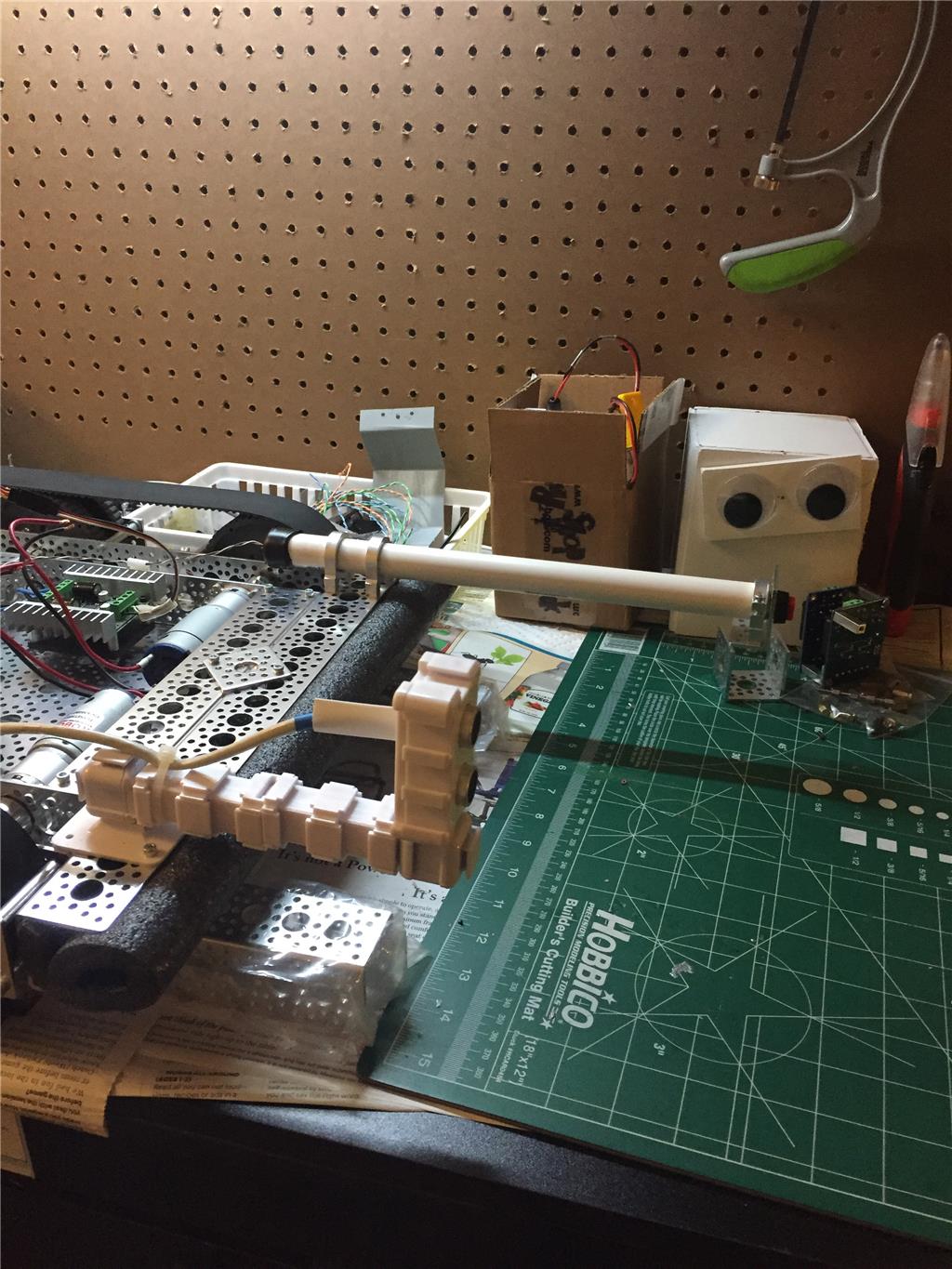
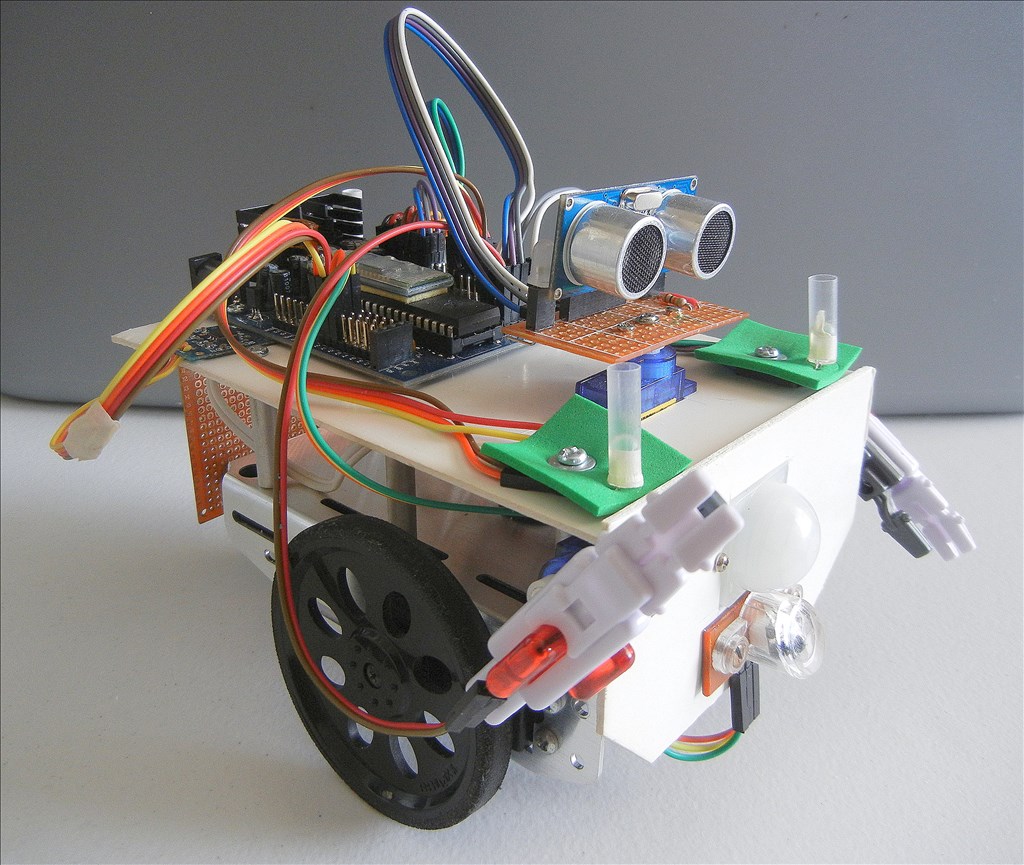
HEMI is currently partly RC controlled right now, but I will be using EZB along the way to perfom the many task that the EZB can do. One thing you will note in this picture is the 2 white pvc tubes protruding outward from the front. these in time will have an Ultrasonic sensor and a bumper switch, and will be used to carefully roll up to the person sitting in a chair (your feet would go in between the white tubes and your toes would touch a large rubber stopper when the robot comes to a stop,holding the feet in place before the lifting. The idea then is that HEMI will bend over forward, while its arms extend outward, safelty grabbing and holding the person, then will rise up till the robot is basicaly fully upright and the person is now in a standing position being held up by the robot. Then to be turned and lowered back down onto another chair ie: wheelchair for an aide/nurse to do whatever is next.

More pics and a couple videos to come as I keep adding to it. Next major hurtle is to add a SSC32, wire the servos and the means to power them.
Discover more robots
Moviemaker's Bob And Marty

David's C3po Ez Robot

very nicely done, pictures are great
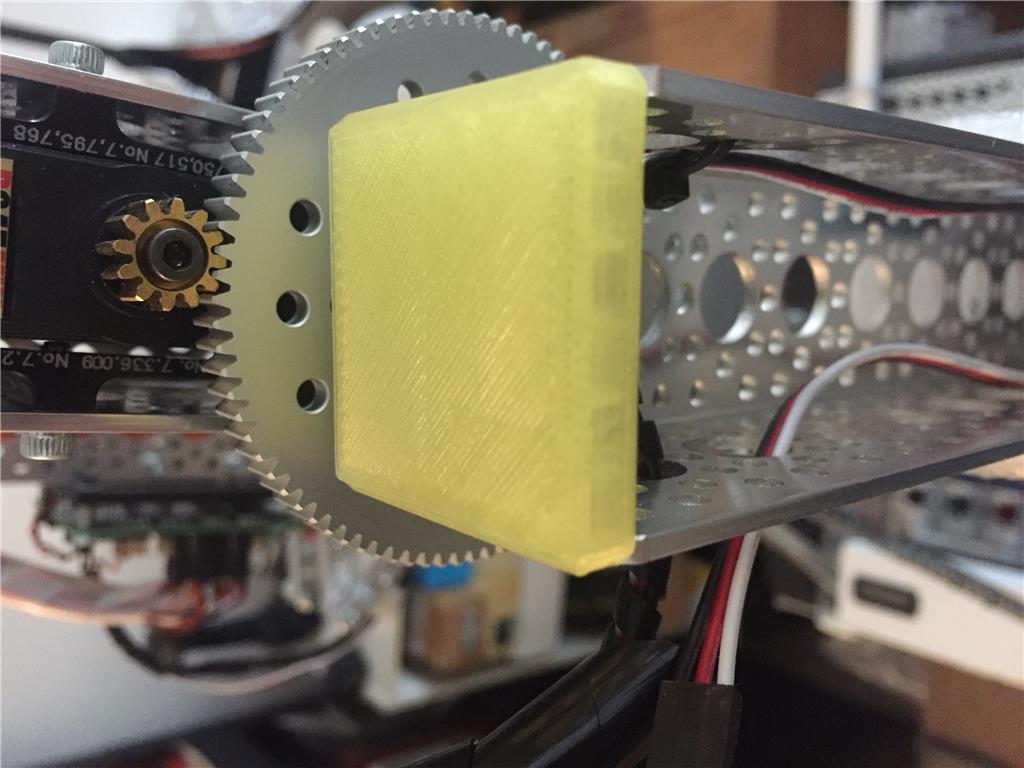
the gear boxes CM-400-CR servo Gearbox, https://www.servocity.com/cm-400-cr-servo-gearbox#197=6&350=328
the servos I am using are: the Ez HDD rotations servos 360 now for my robot arms, works good.
EzAng
For the center channel, I use both the 36" and 48" pieces, as the design isto be 5 feet tall.

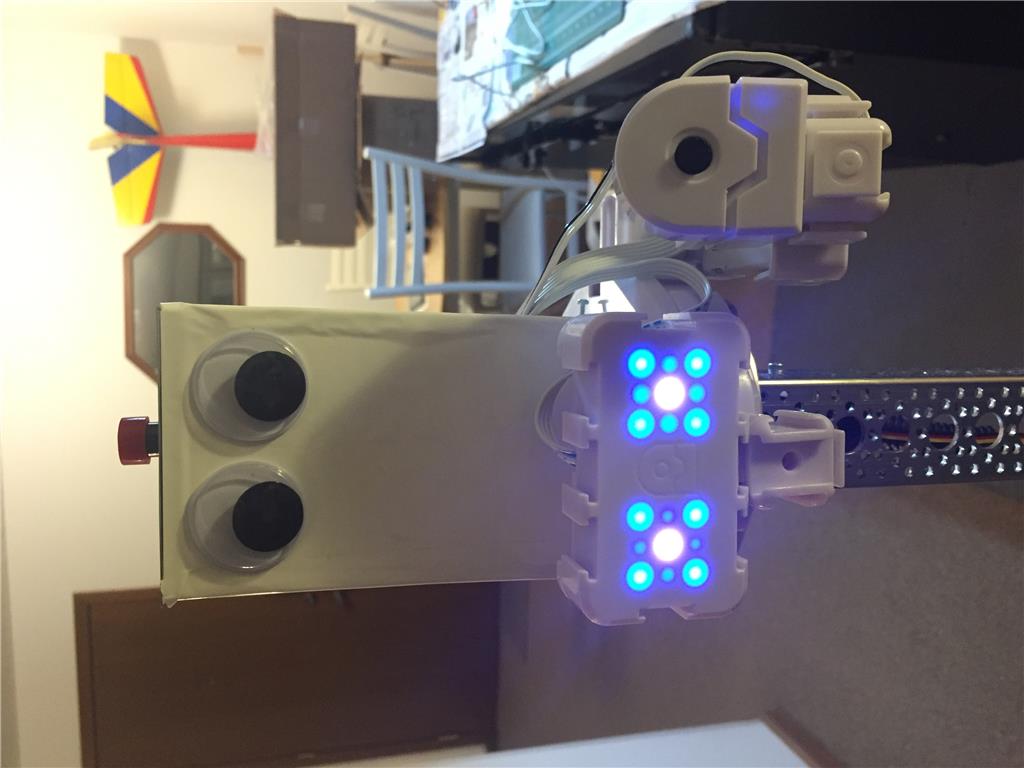
Backside of Hemis Head. As you can see, I use the base from a Six.
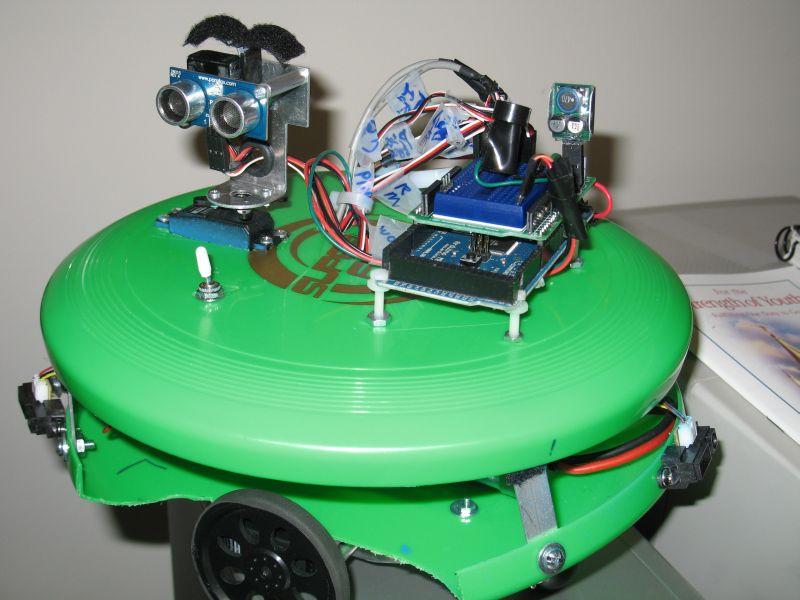
The The redesigned base. Shown here is the forward sendor and a bumper switch. The idea here is, when the robotrolls up onto the person sitting, their feet willfit in between these to devices (toes prerssed against the foam). The sonar helps slow the bot down as to not run over someones feet and the bumper switch presses against the chair, and the bot stop forward motion. I also plan on doing this via a typical R/C control system, as well as the Mobile app.I got to say, this is quite a machine you have.
I am starting out with a few pieces from servo City to see what I can come up with. I hope to incorporate my Mr. Roman talking head...
I might just use a tripod or just get a few 36" channels, We'll see...
thanks for all your help, thoughts and concepts,
EzAng
Any other Pics are always welcome, thanks again
My MyMoov, not InMoov is on it's way of looking good...
EzAng
Soon more pics, Im making slight changes to drive motor electronics, ands need to put the arms back on. I have a short video of how the torso moves, and will post the once I figure out how to again lol. Stay tuned...
Wow that is a great mobile base you have on that!
@robo rad Thank you. The base is the Agent 390 from Servocity. I do like it, it really moves right along and im happy to see that it navigates just fine on both a hard floor or a carpeted floor.

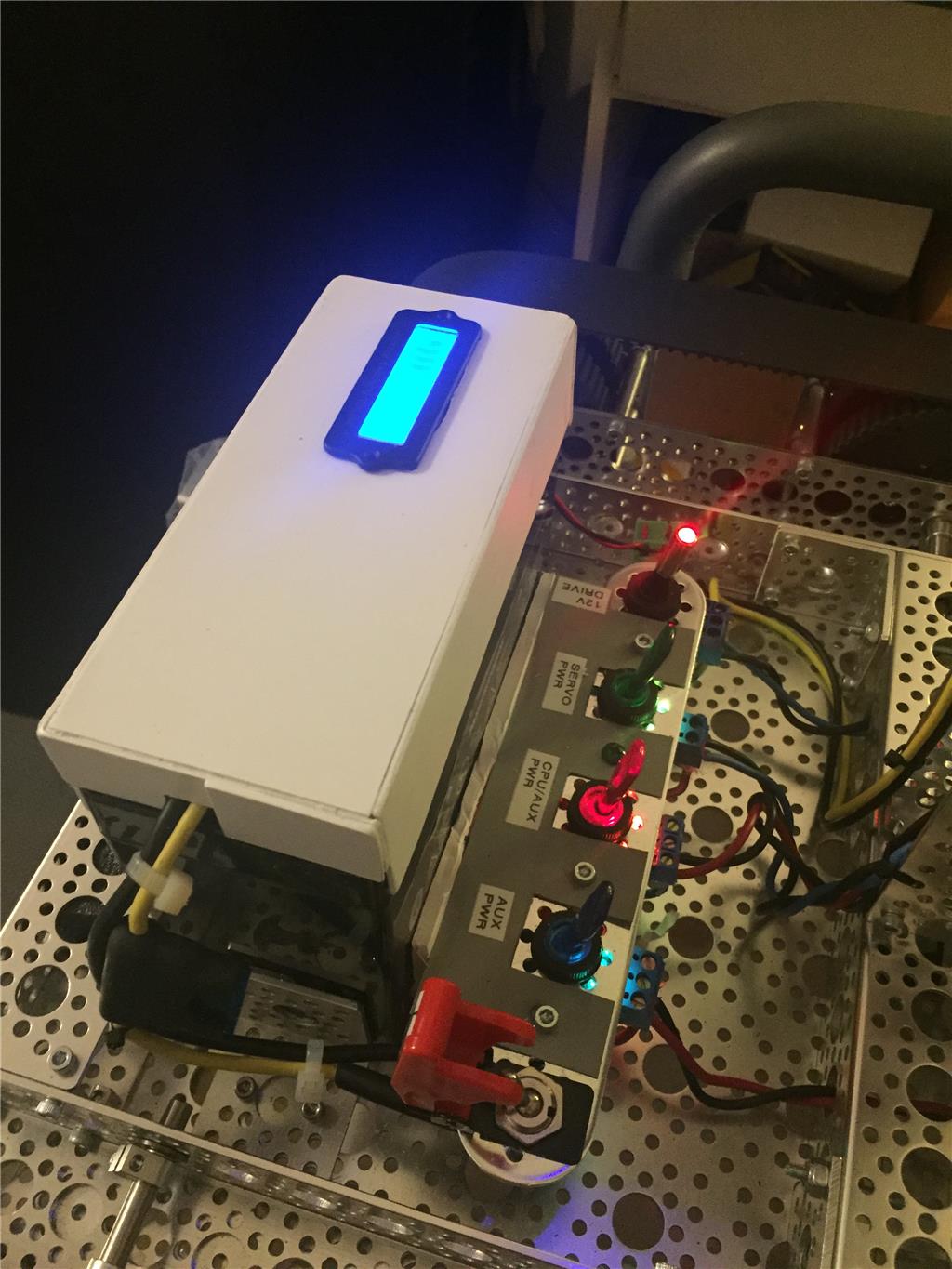
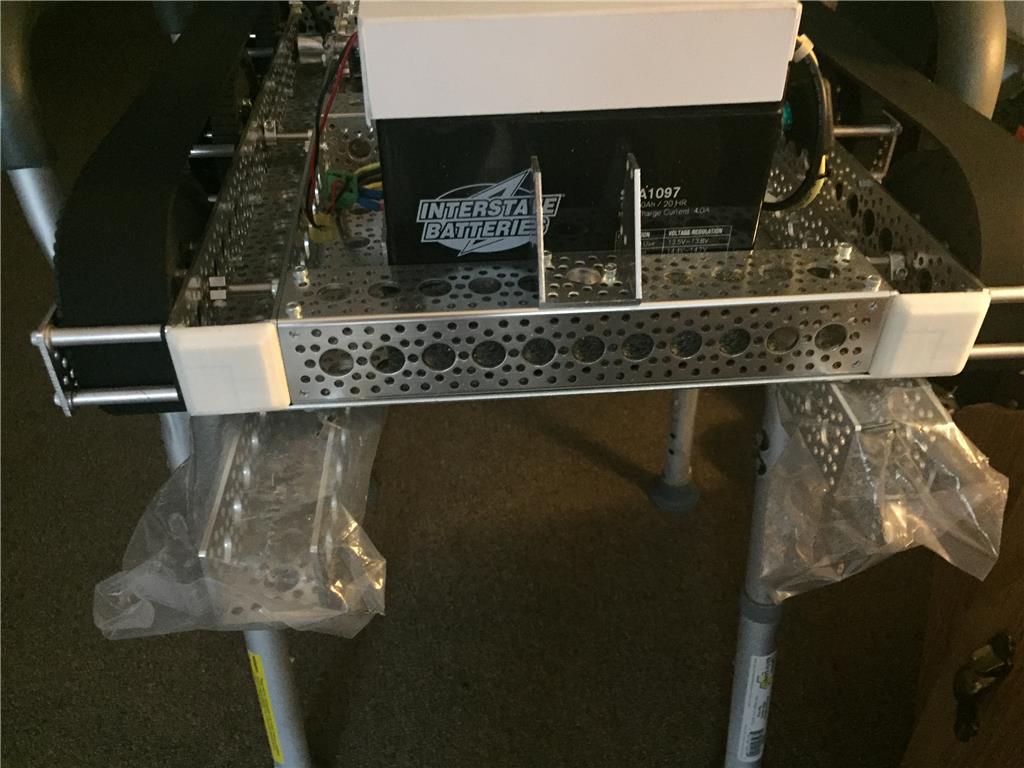
The back side of the base. Im not too happy with how ive got the batter held in place. I could use a few suggestions on something a little nicer looking maybe. I also need a nice way to mount that digital battery meter.
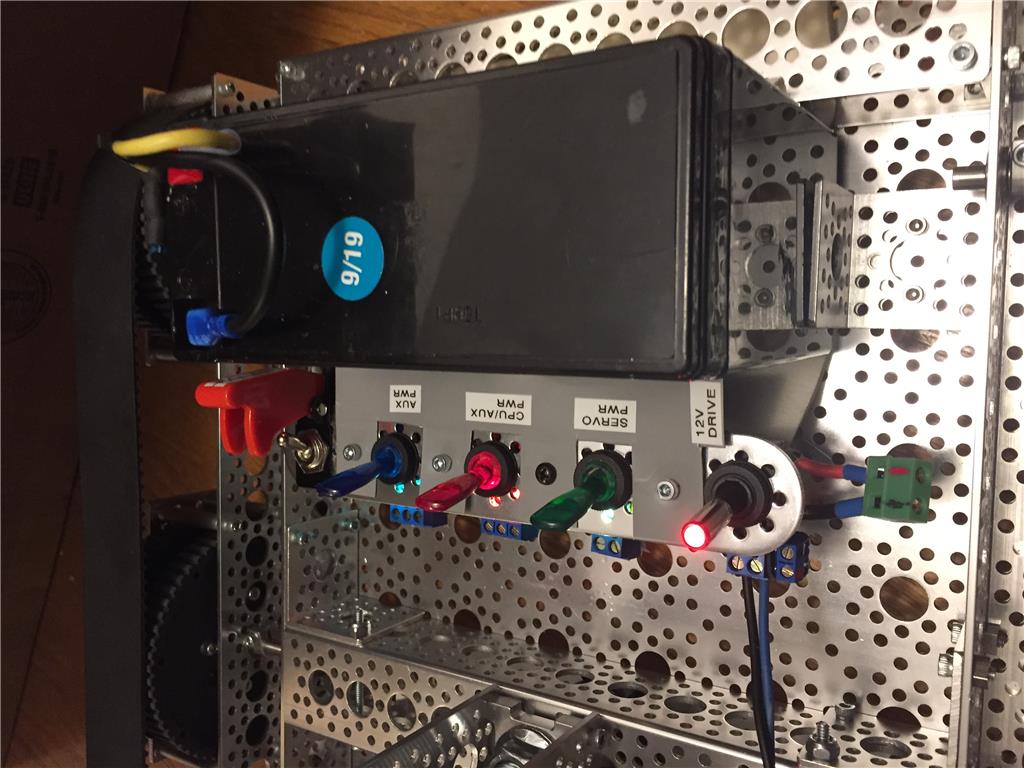
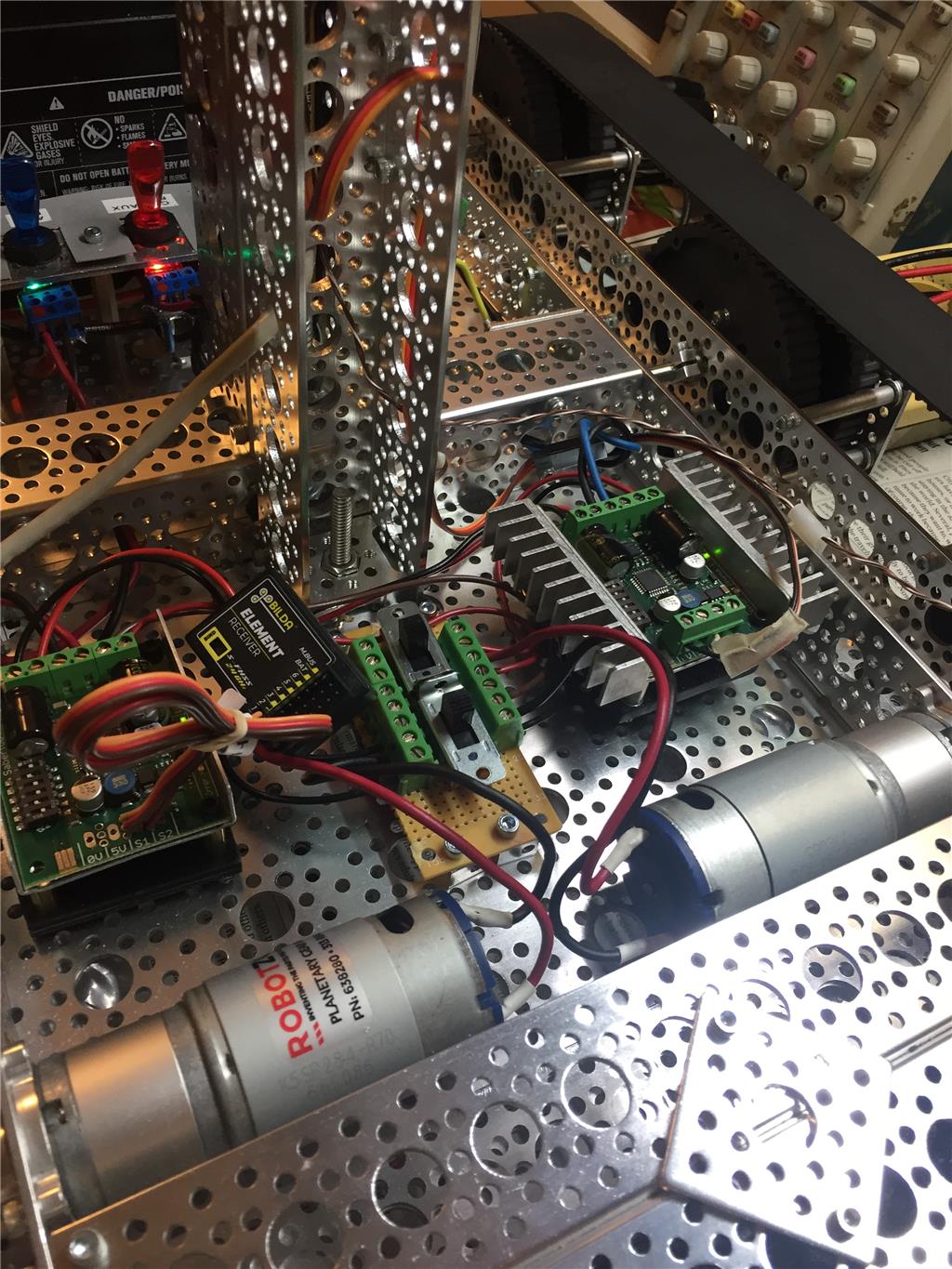
Updated Electronics in the base. Two DE sabertooth 2x12A. The one on the right will be operated via the EZB, the left one operated by an typicla R/C controller. The dial slide switch assembly in the middle selects between the two.
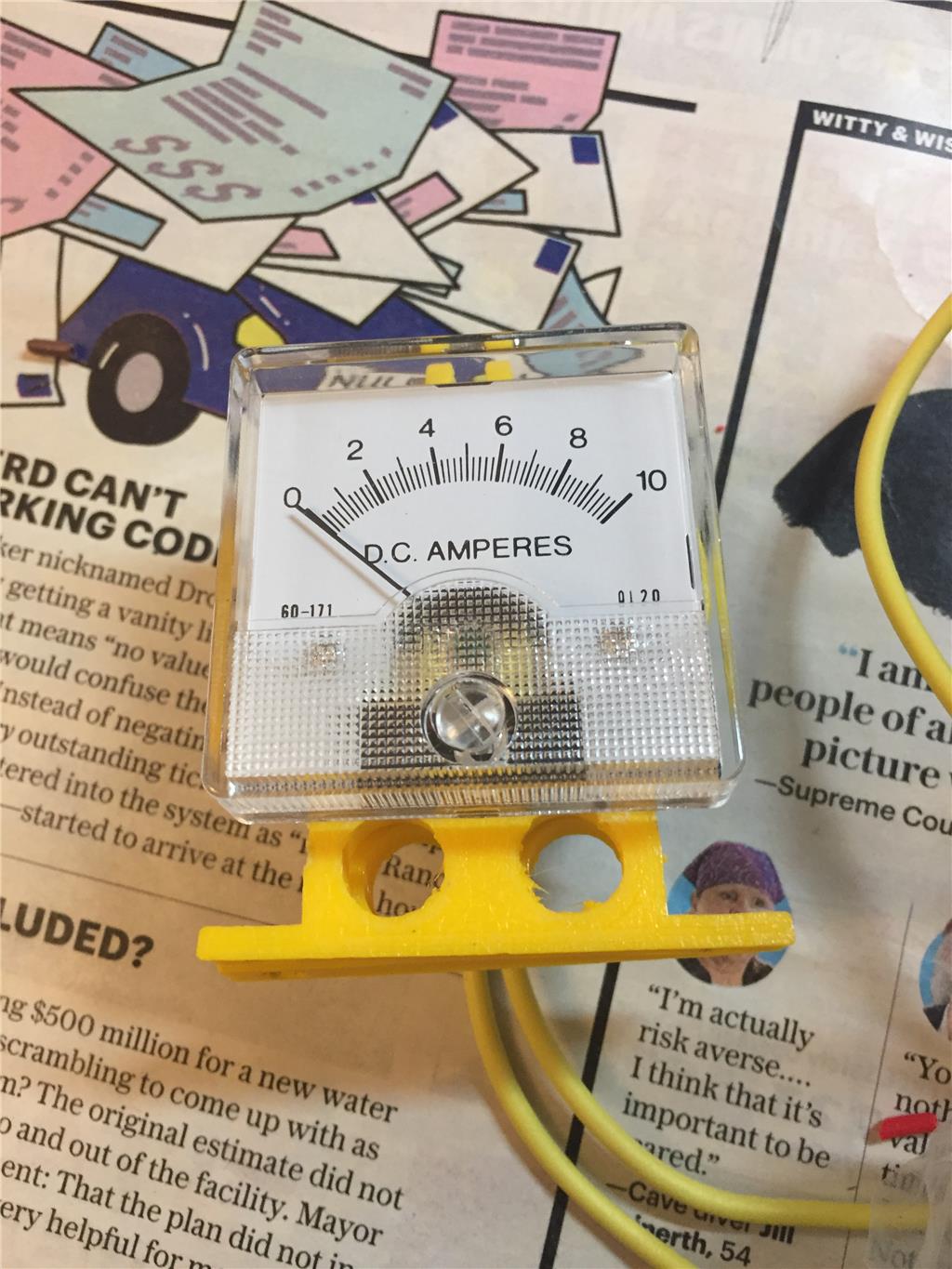
I was thinking of adding this in line from the battery. Gotta love those analog days, lol