








































-636343637196289983.jpg)
-636343637315278038.jpg)







































-635683694093497265.jpg)


Edit: Kickstarter campaign failed in 2015.
Starting in 2026 you can build an interactive Alan by joining my Robotics Courseware Mecha Morphix (links coming soon). You can follow along with detailed video instructions starting with 3d printing parts. Off the shelf hardware components links are included with the BOM. Don't miss out! Be sure to get a head in robotics. Build at you own pace. Coming soon.
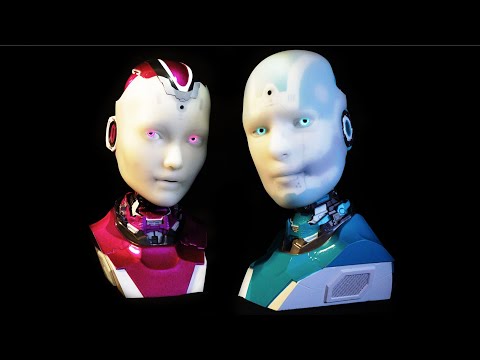
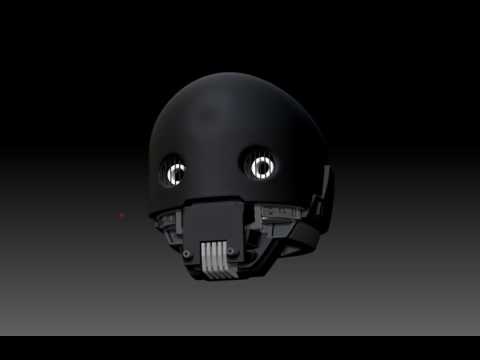
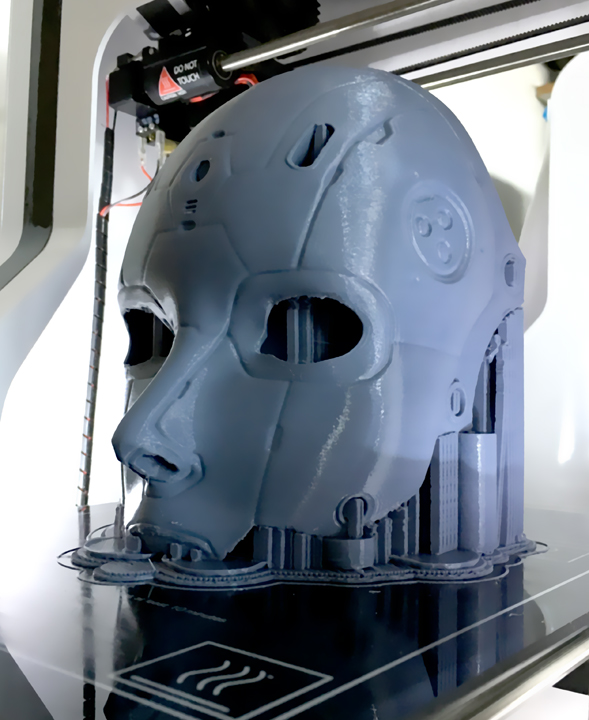
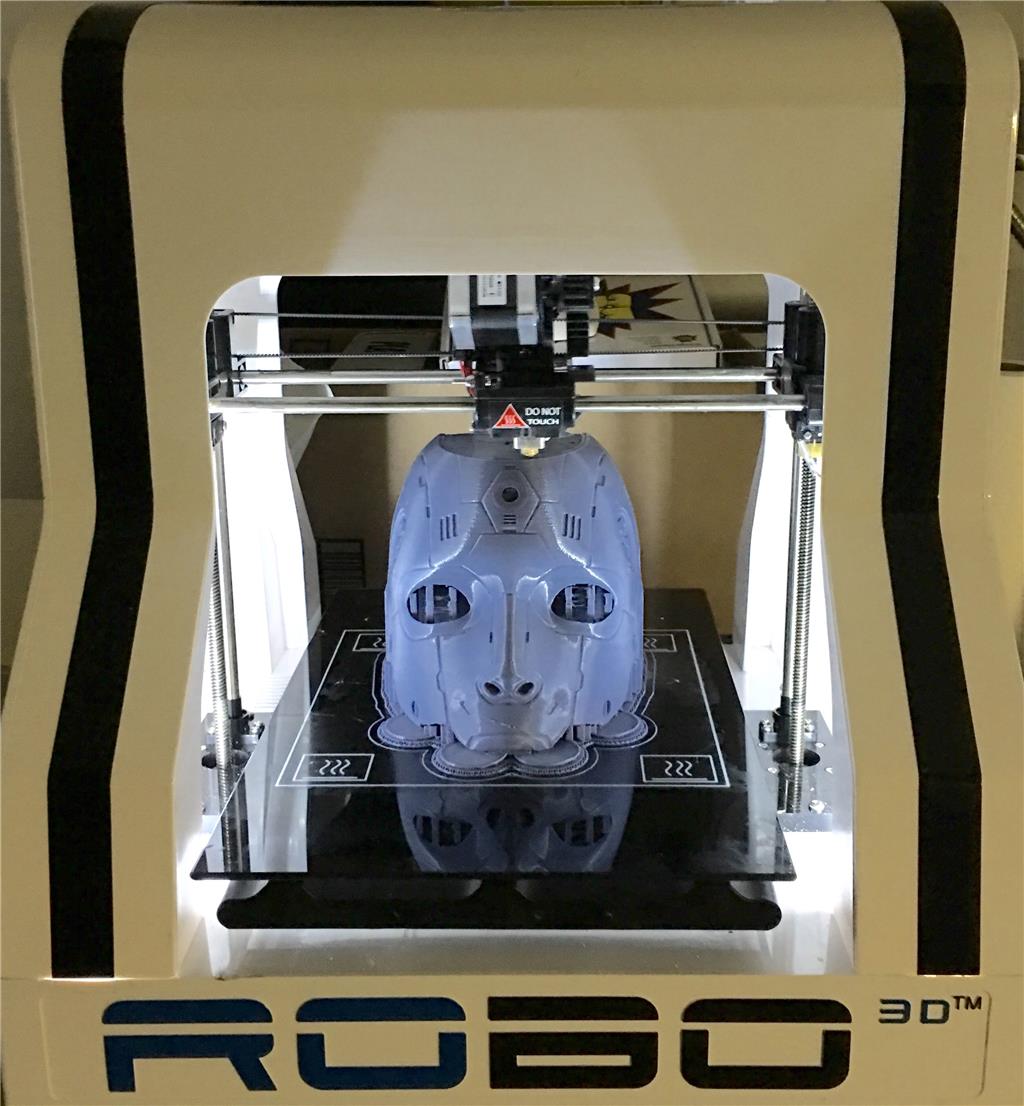
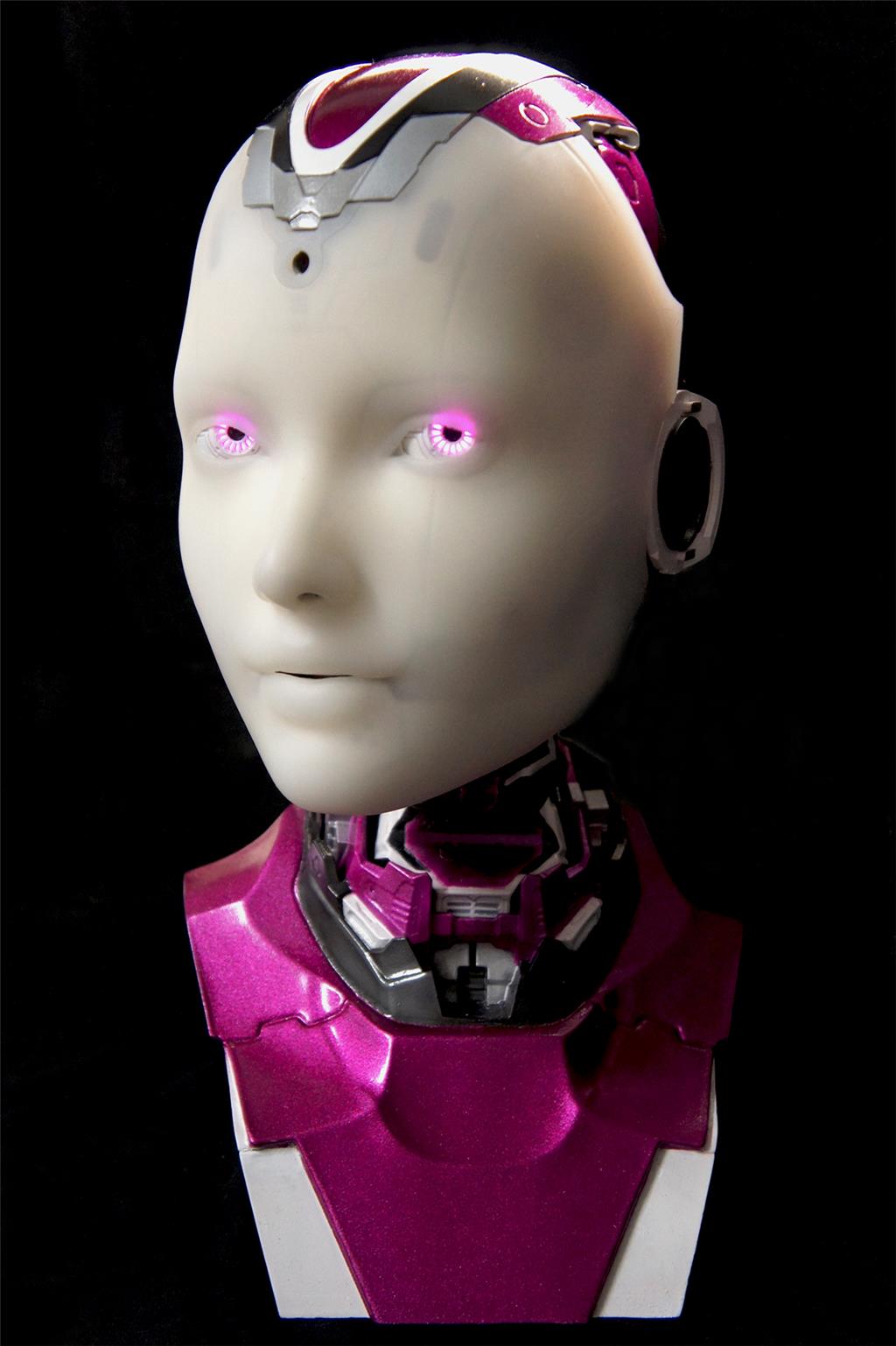
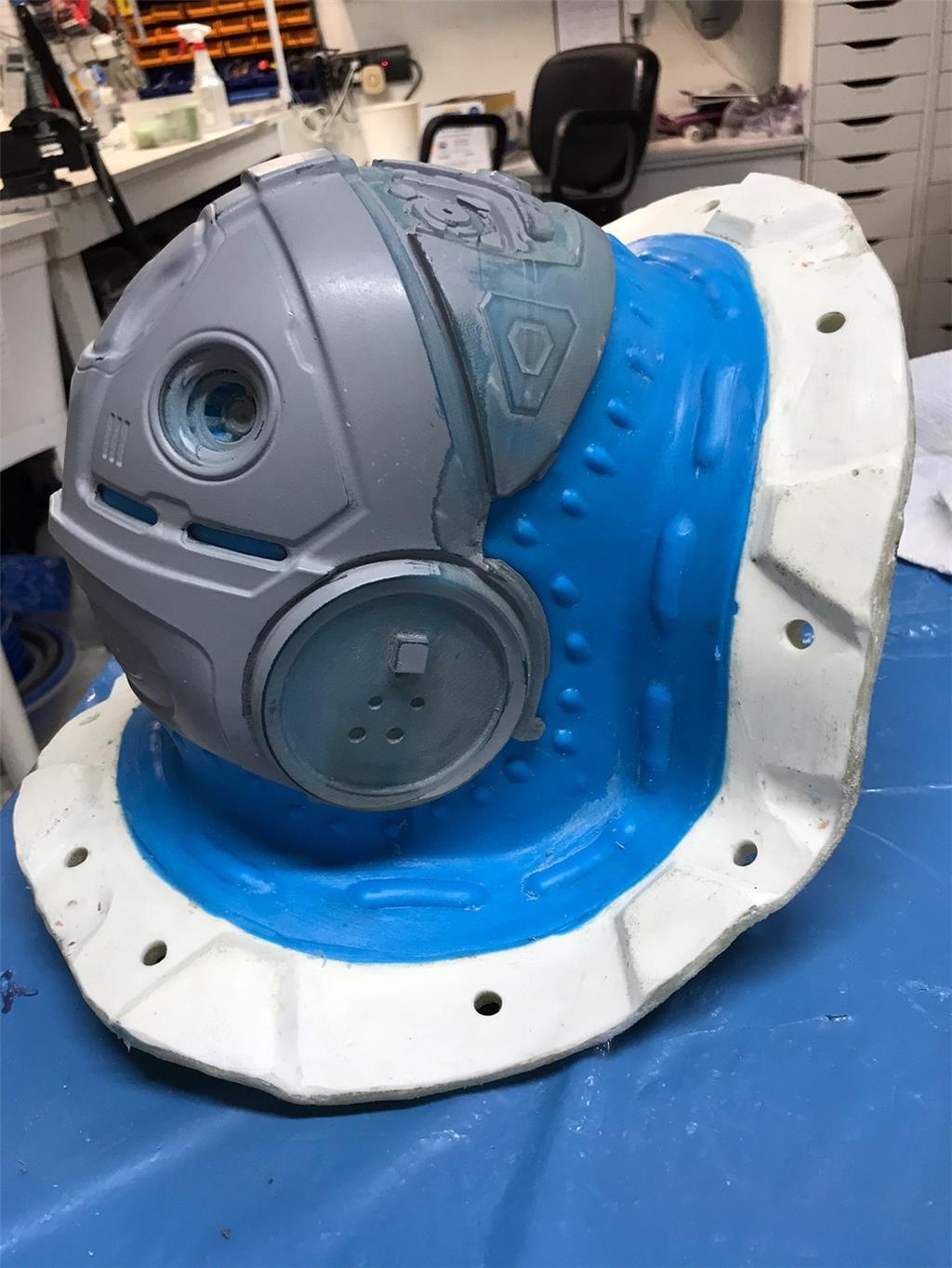
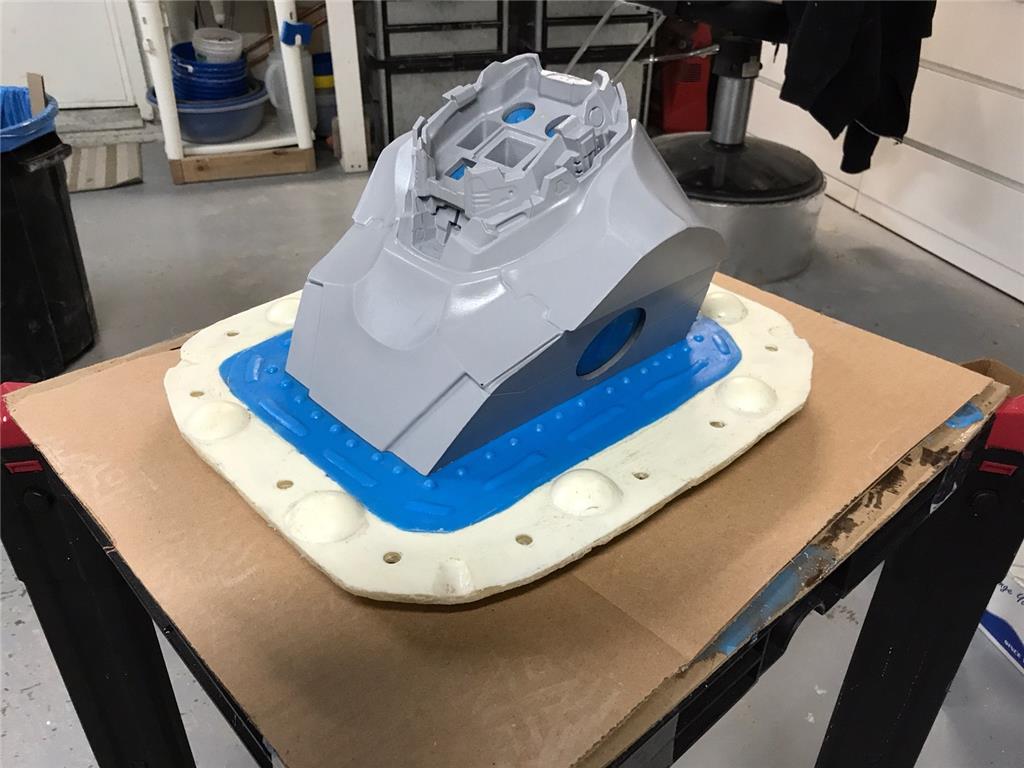
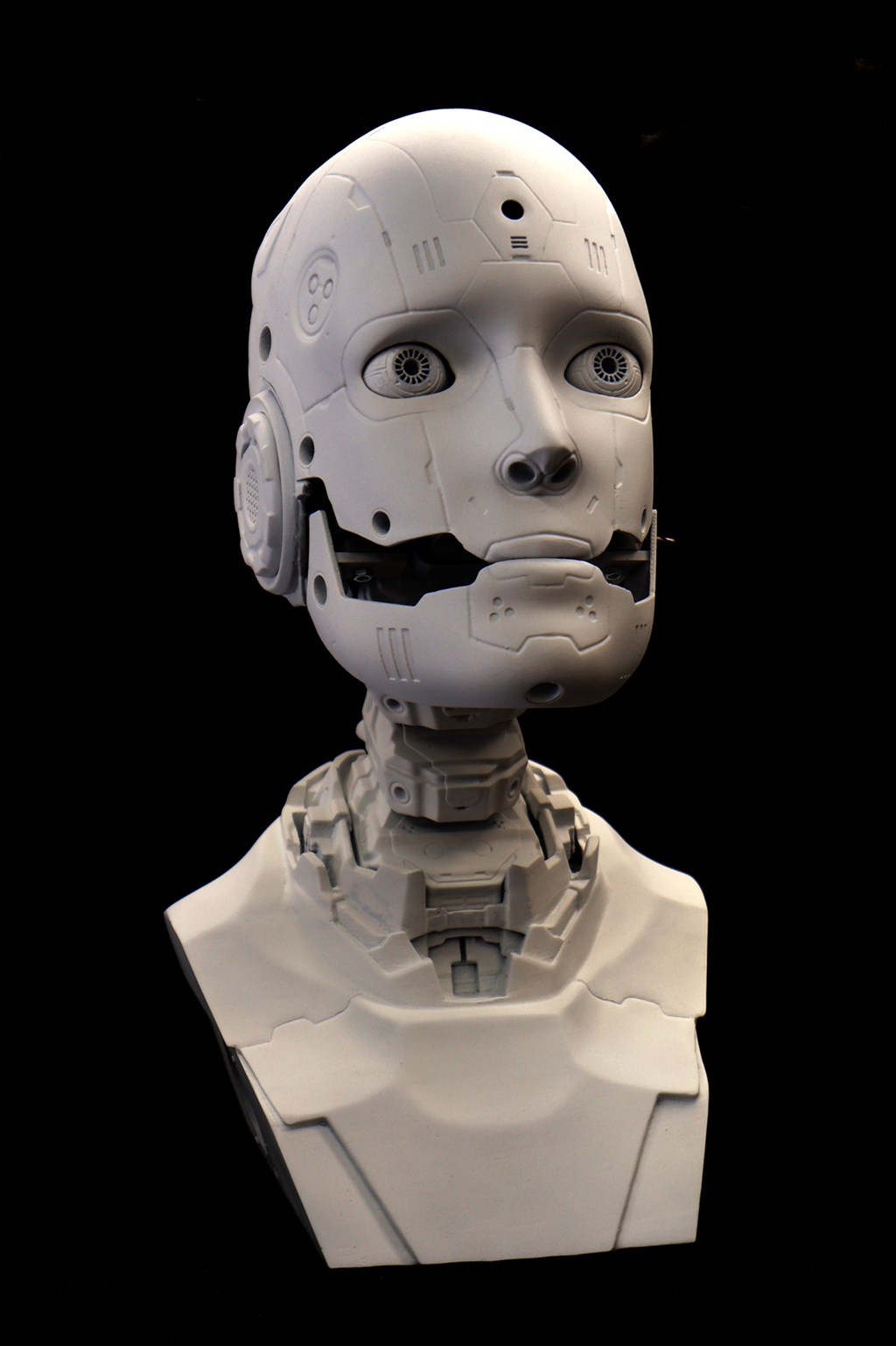
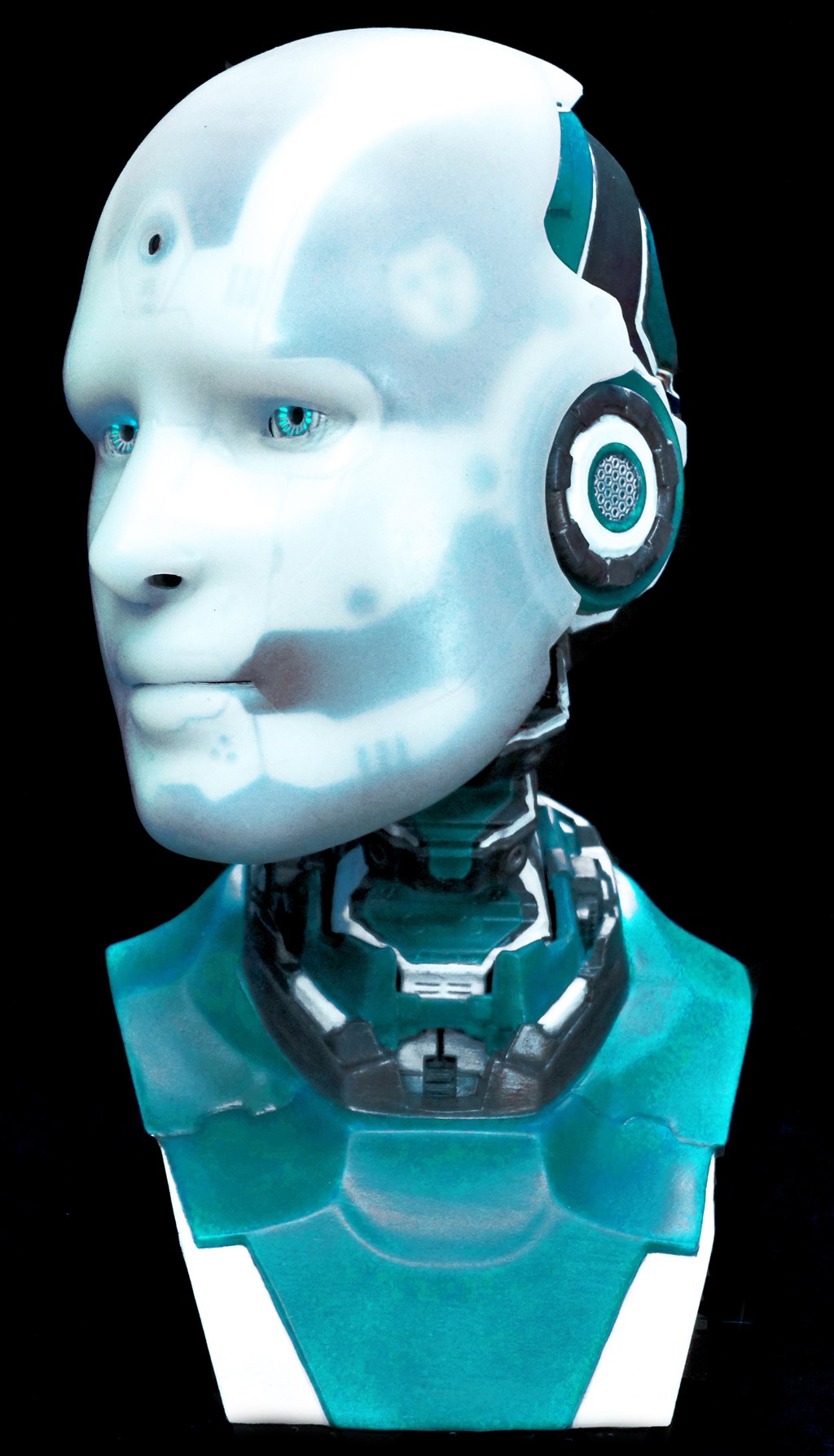
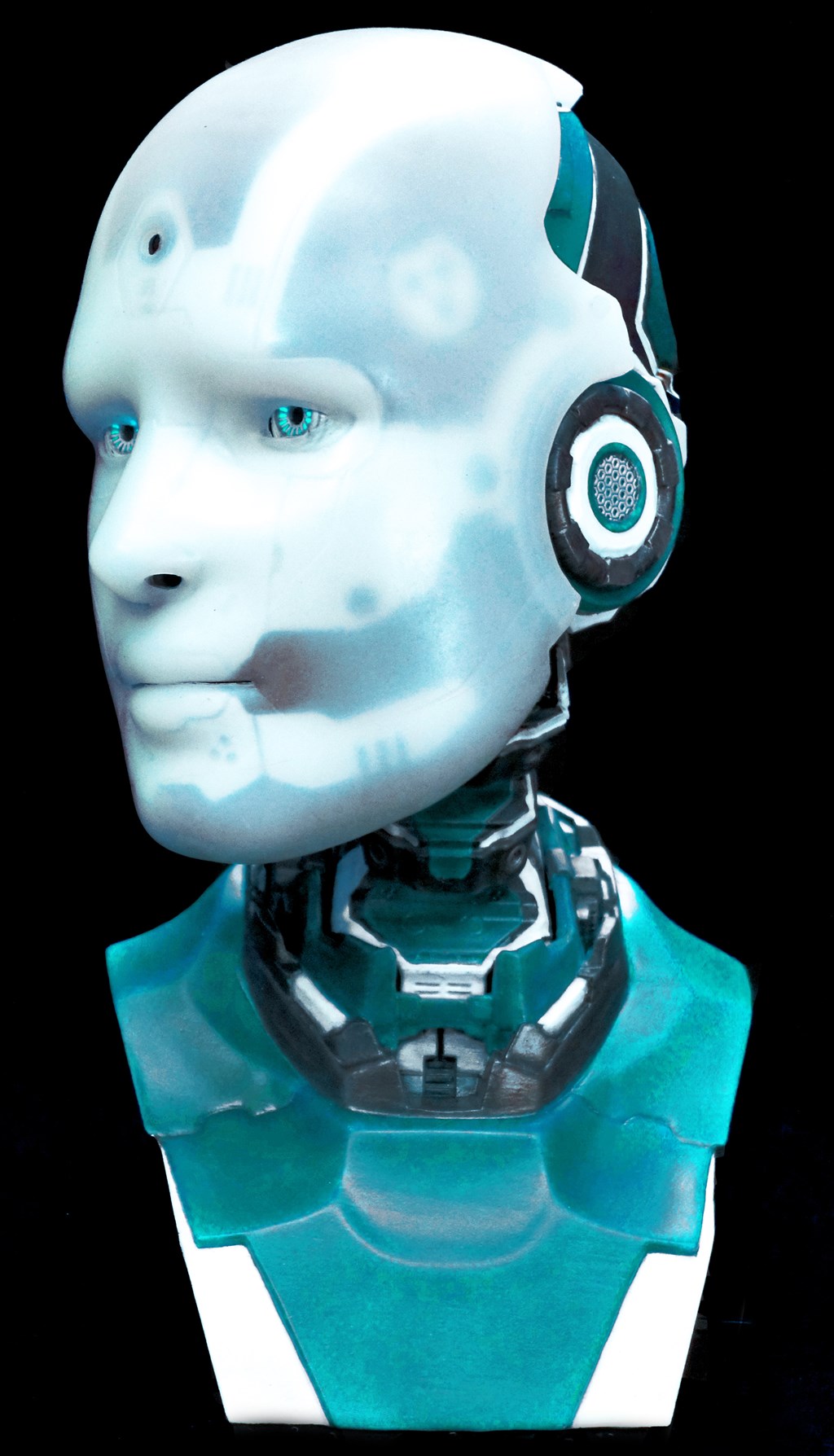
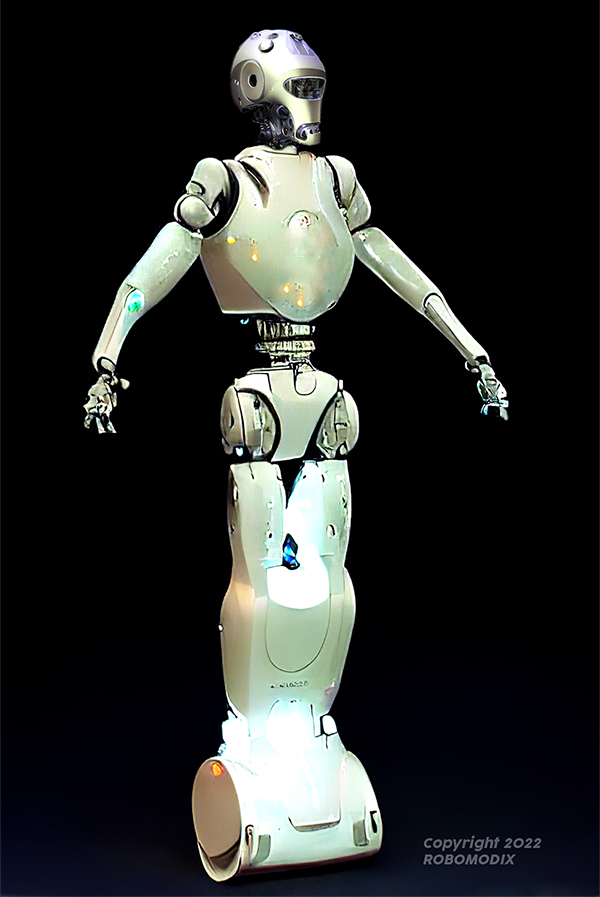
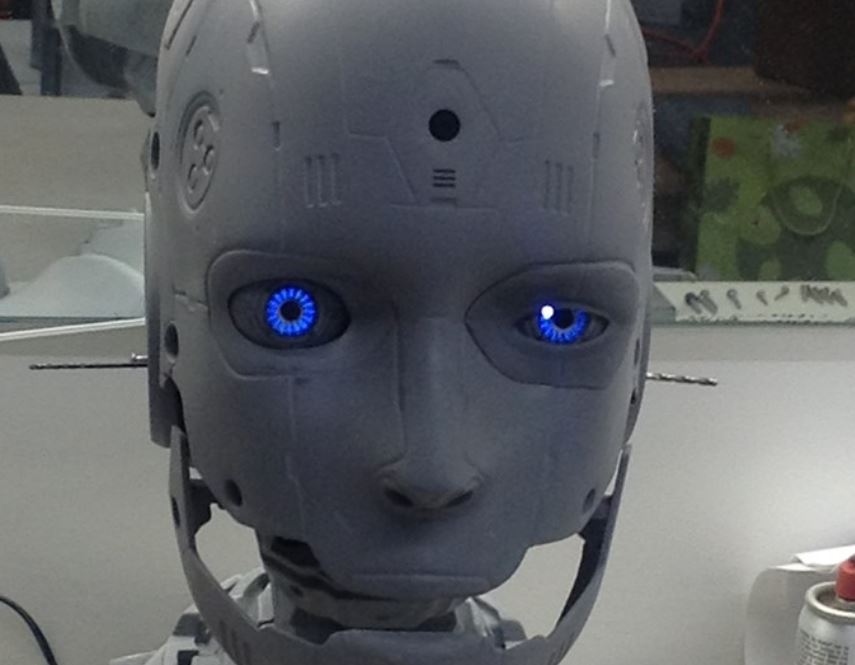
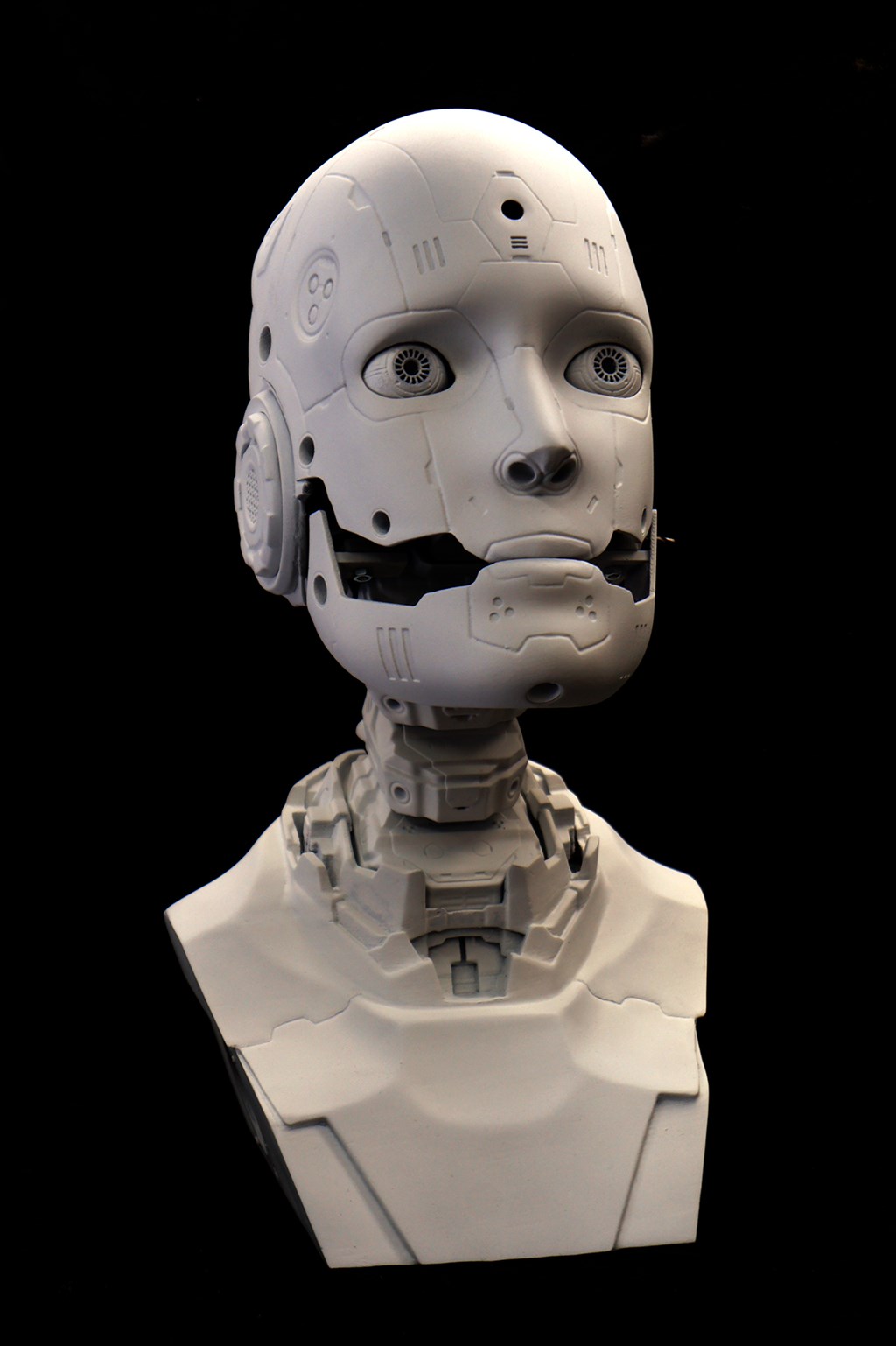
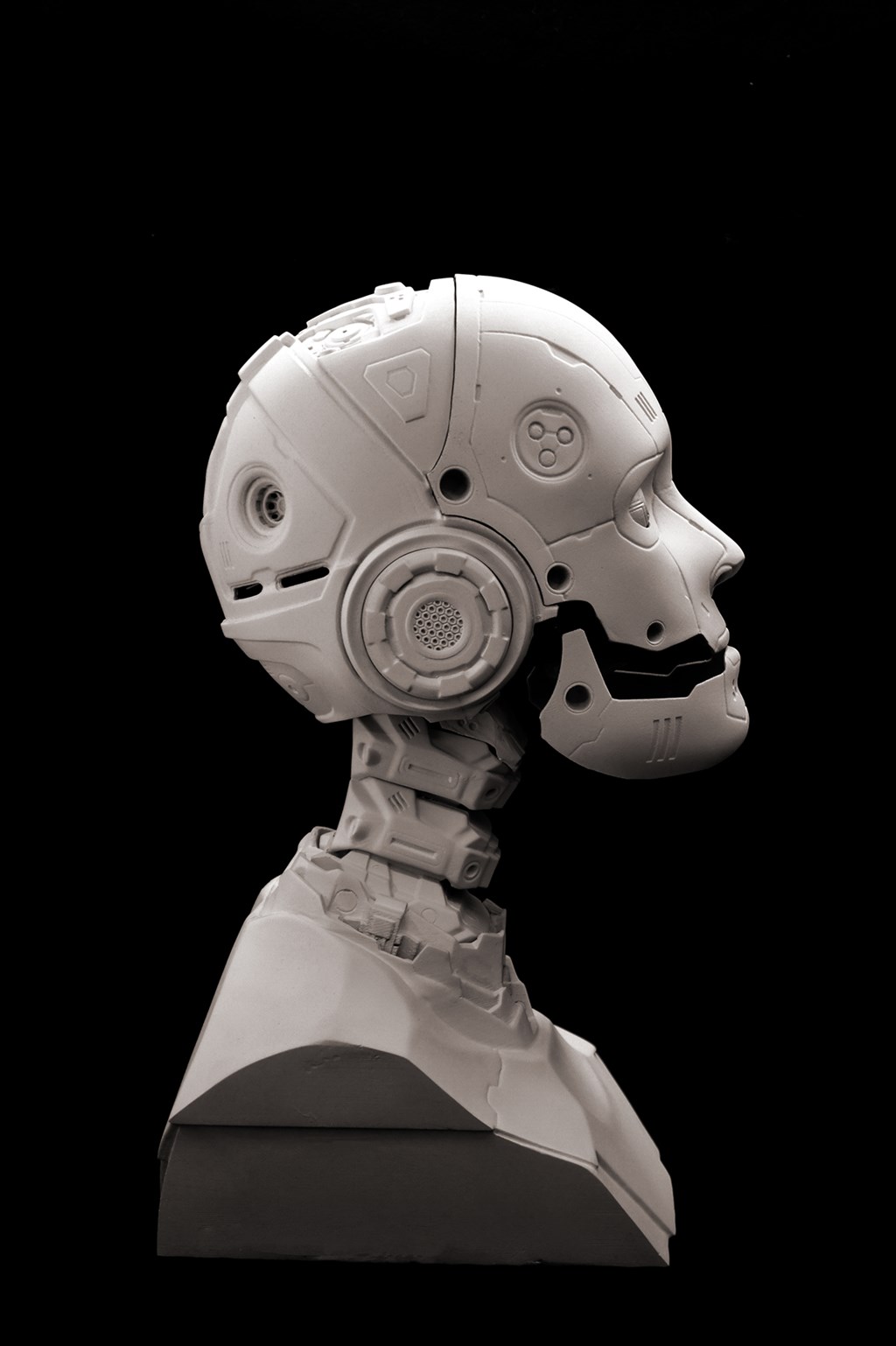
Introducing Alan, the android head robot platform kit, soon to be released on Kickstarter.
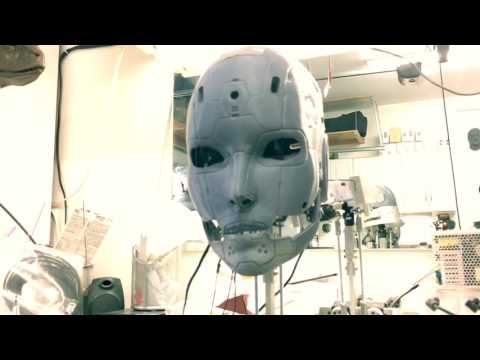
First a quick introduction. For those that may not know me. I've been a make up effects artist in the film industry for the past 23 years. Robots have always fascinated me since I was a kid growing up in Ohio and watching Lost in Space episodes. That interest never left me and when starting work in the film industry, I taught myself animatronics. That is I would be called upon to make something move via radio controlled, a puppet, or a toaster or ? As CGI took over the animatronics part of my industry, I focused my free time on using that knowledge for robotics. When I saw prosumer 3D printers come on the market 8 years ago, I knew I could get some of my ideas to the table with out the need for a garage full of CNC machines.
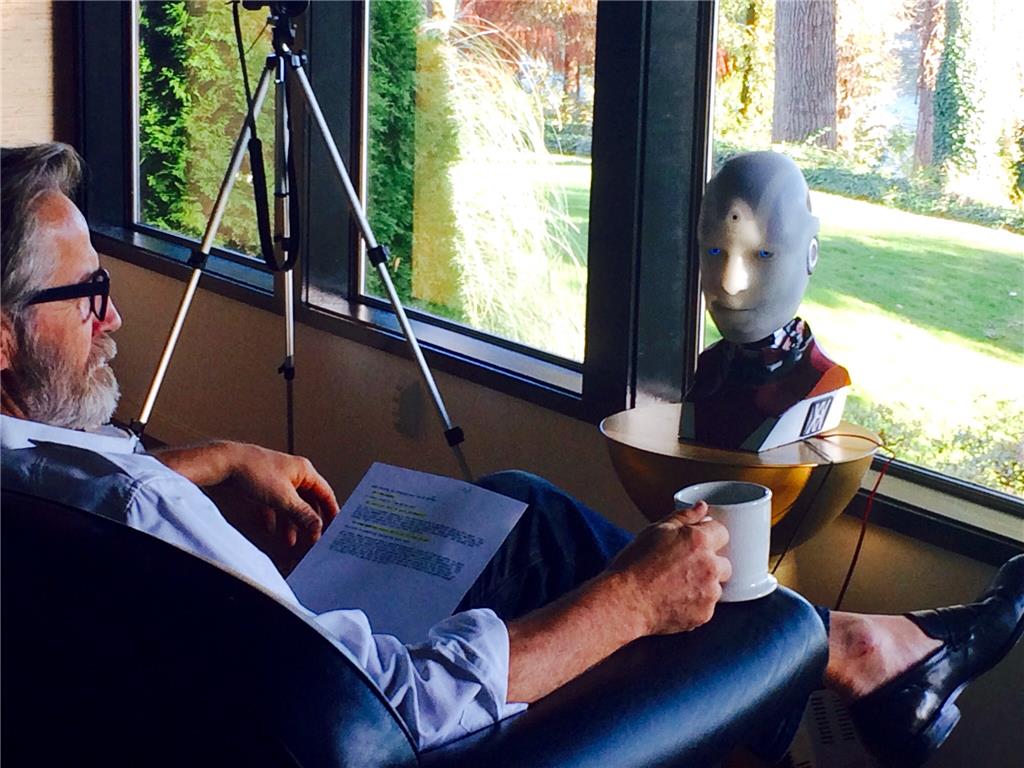
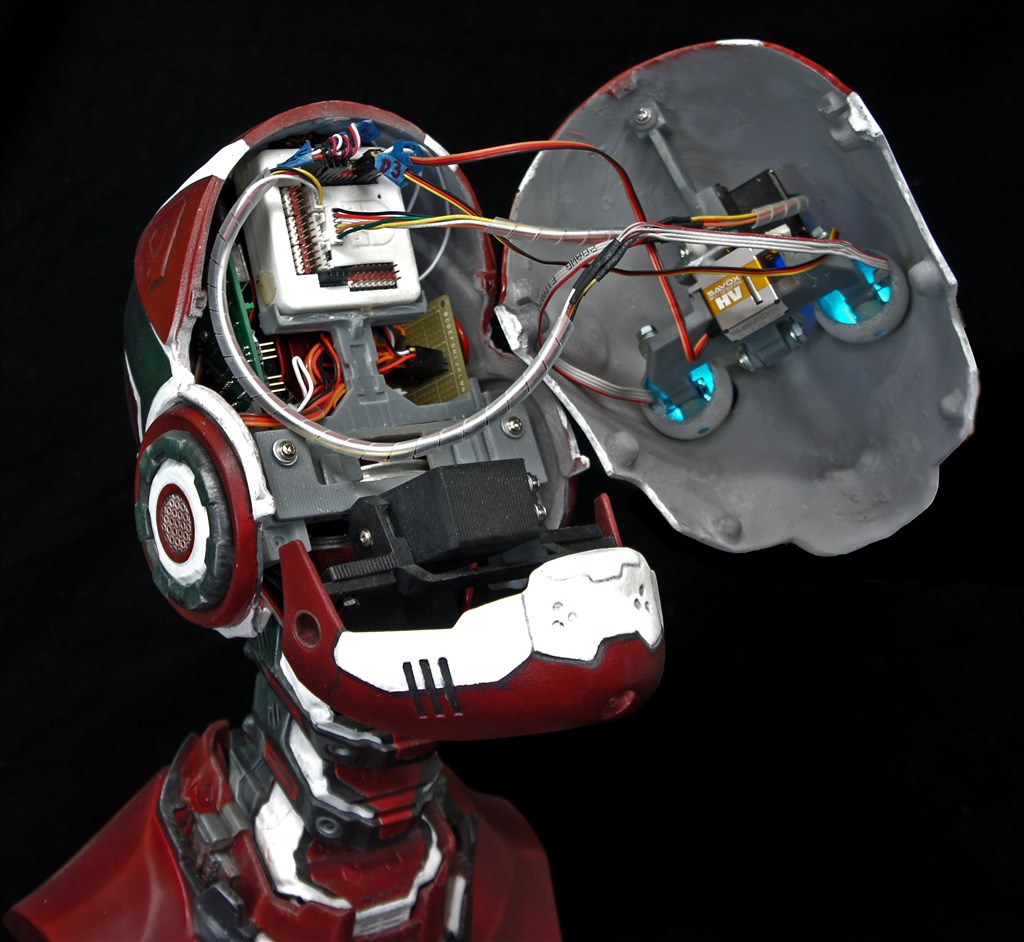
Alan is a culmination of of both technologies, animatronics and 3D printing. When this idea started 3 years ago, I had just found EZ Robots and knew that I could build an interestingly designed kit for everyone so they could experiment with robotics. A platform that personifies how we will interact with robots and androids in the near future, by looking them in the face.
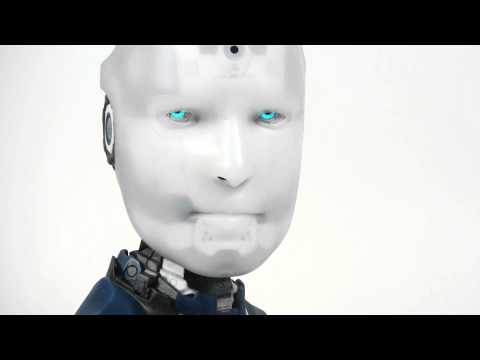
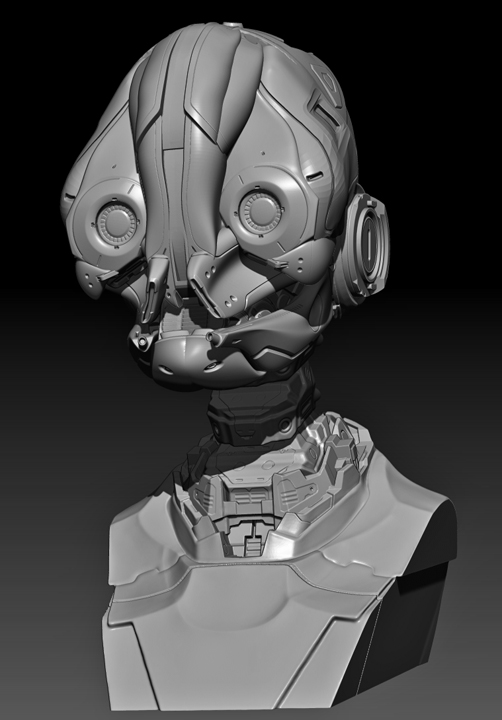
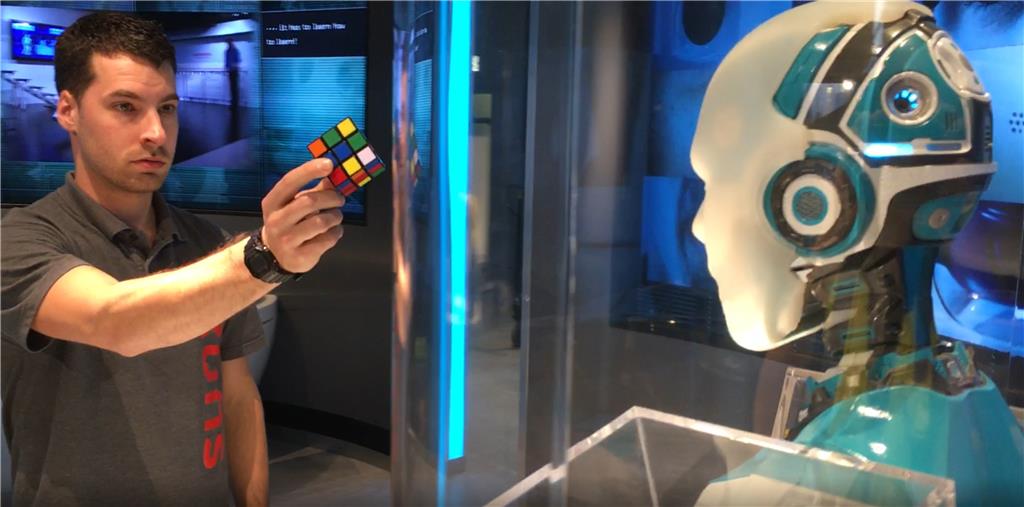
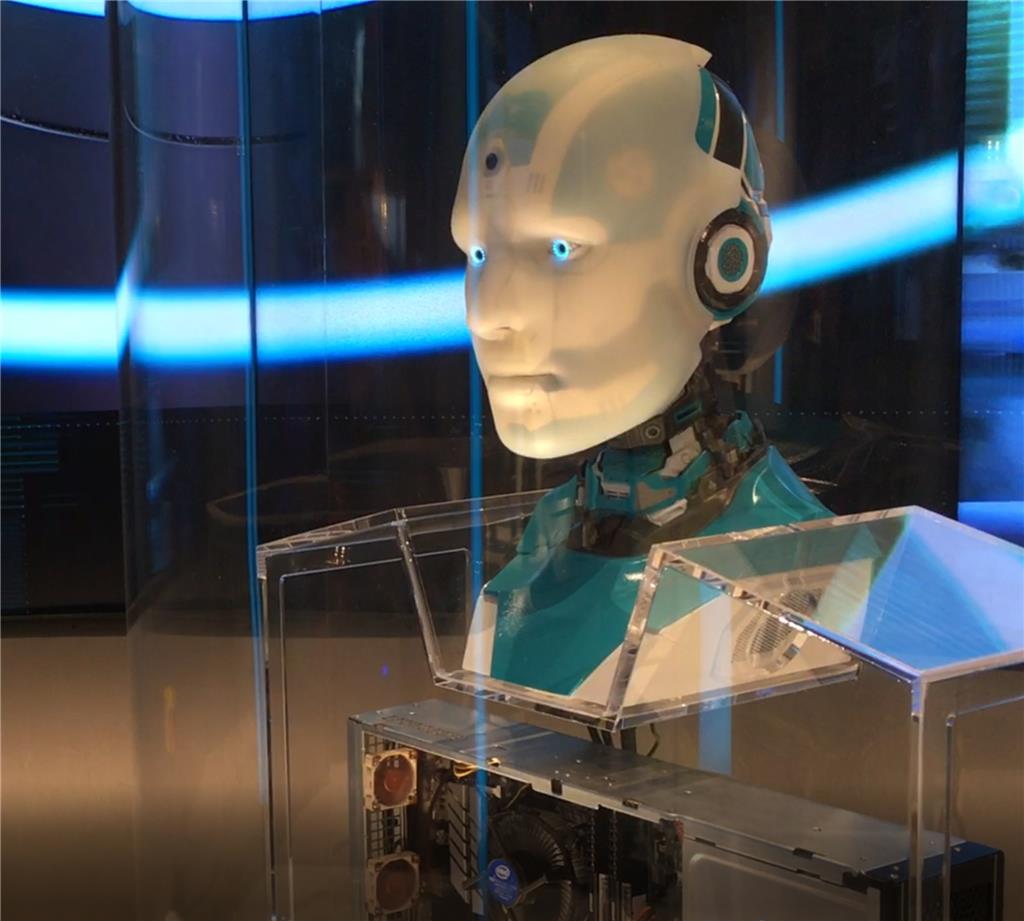
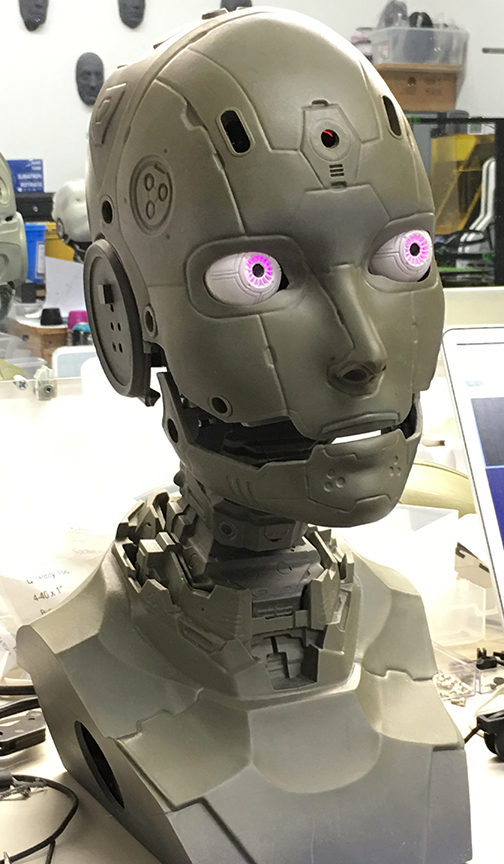
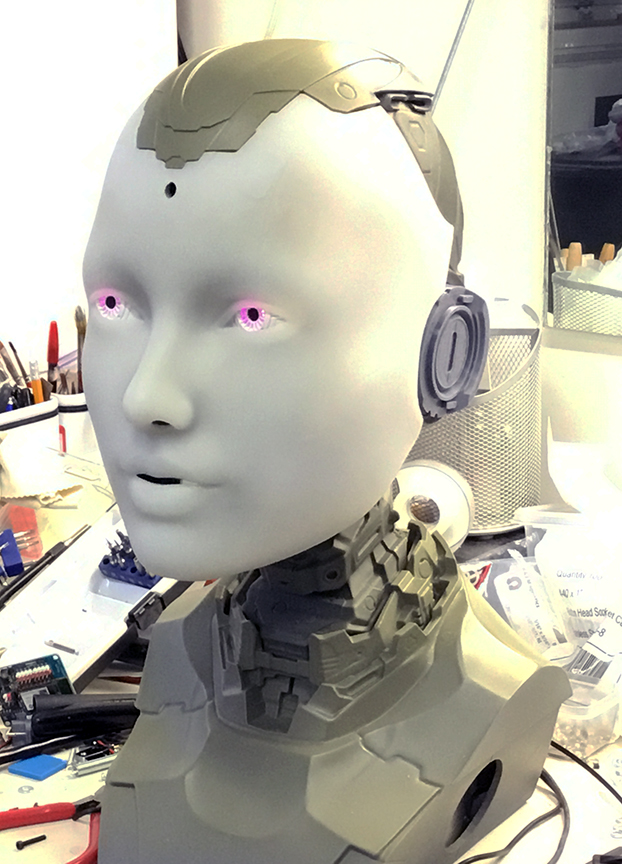
My first challenge was to make sure I leaped over the "uncanny valley". To do so, I took the human dimensions and changed them a bit, eyes wider apart, downplayed high details and added features that were without a doubt not human and certainly robotic in form.
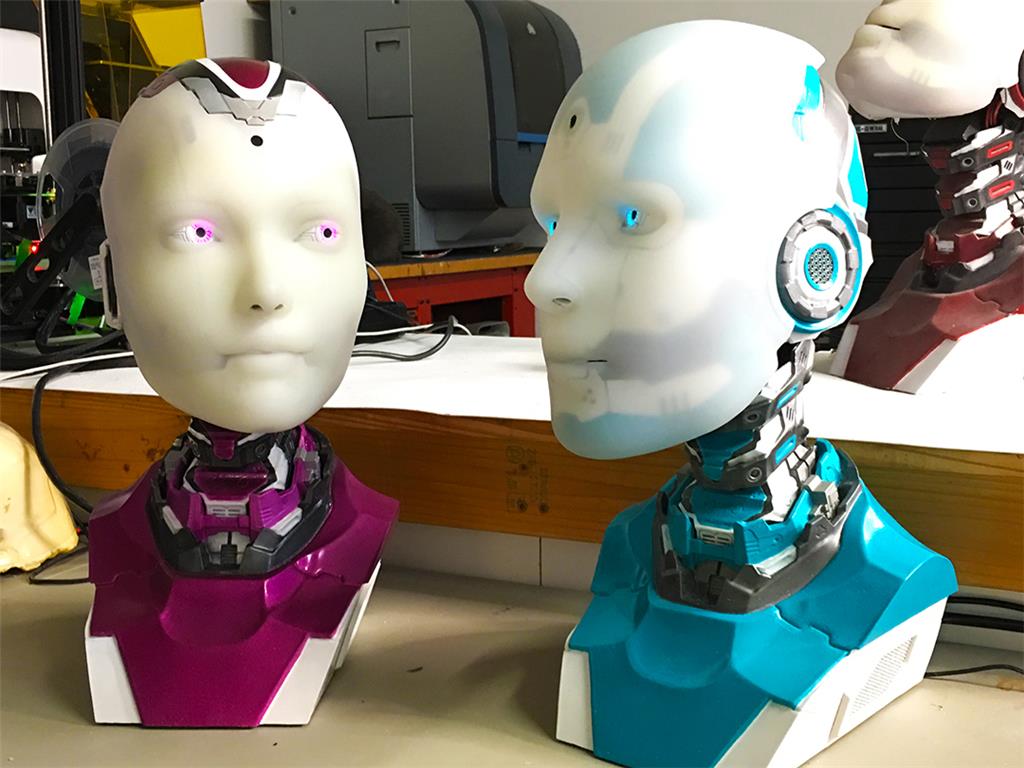
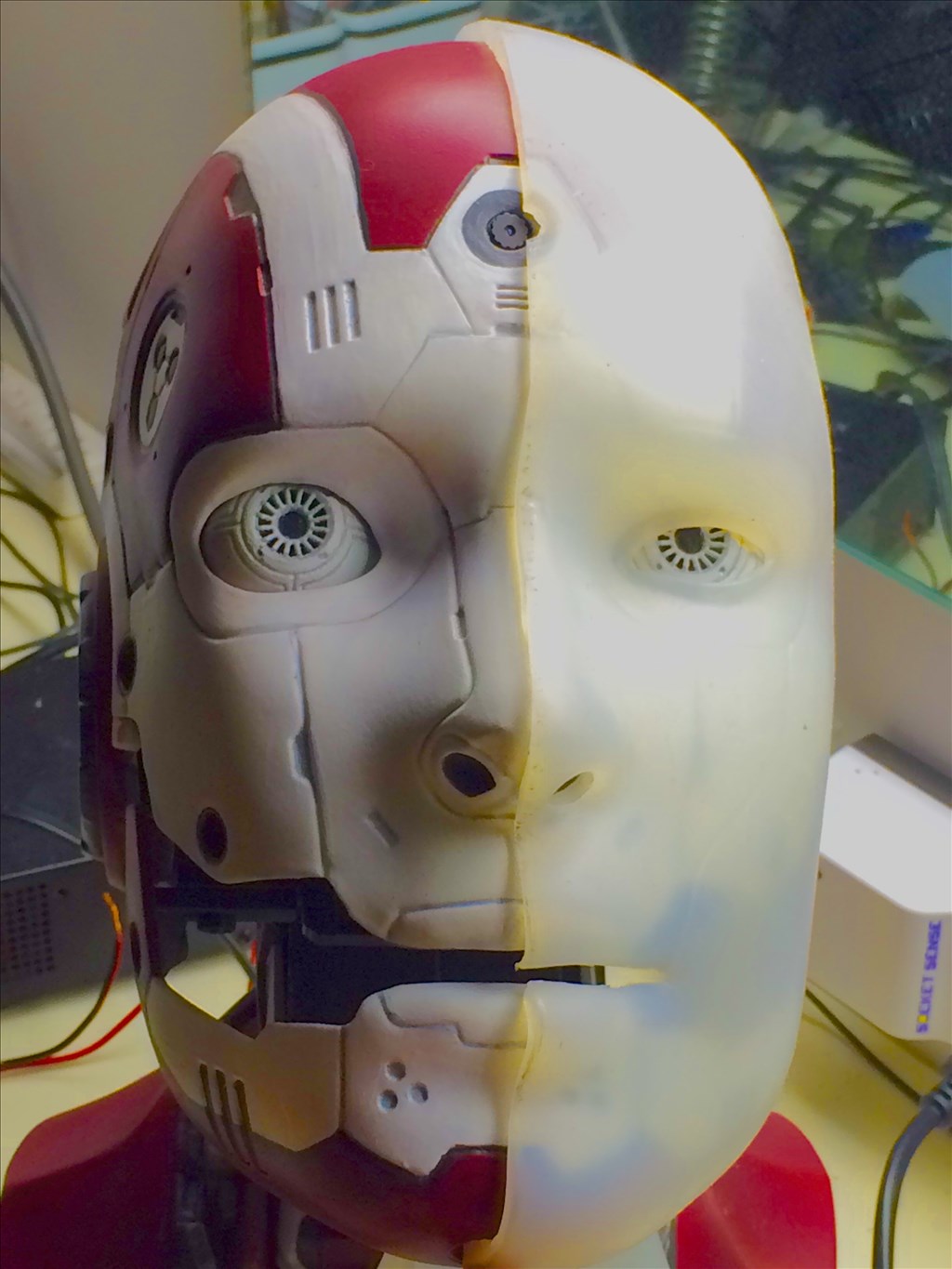
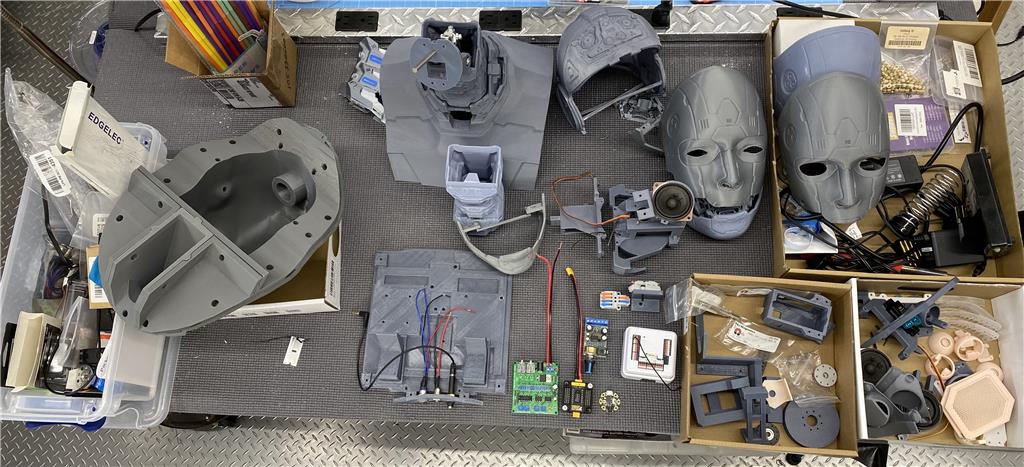
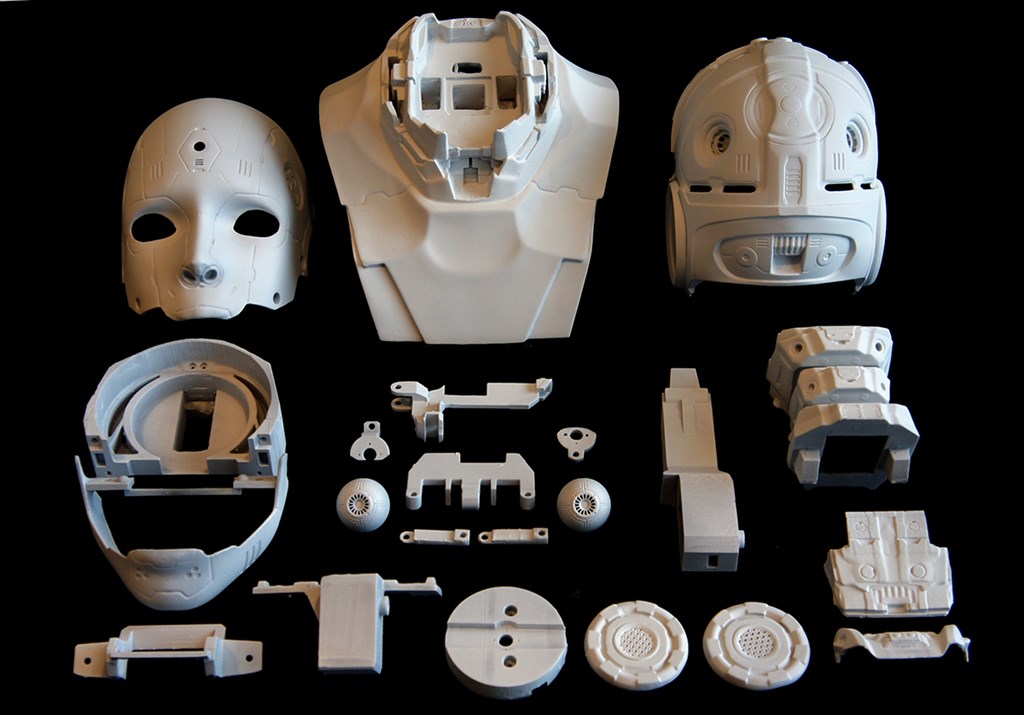
The second challenge was keeping the cost down for consumers. A head like this in the film industry, filled with lots of motions like brow, smile, etc would costs $10's of thousands of dollars. So I built Alan with a modular design in mind. Meaning that the store front will carry modules that will allow you to customize and upgrade the same robot without having to buy a whole new head. As an example the front subskull can be replaced with a module with brow movement, allowing you to keep the entire head and eye mechanism. Other silicone skins will become available different colors and genders, styles, etc. The low cost introductory head will include about 22 parts, easy to assemble, with the consumer supplying servos, power supplies EZB, etc. on their own. My website will include links to all the accessories needed, plus mods like LED eyes, built in audio systems and so on. All the parts will be molded and manufactured in Los Angeles. There will be no pressure injected molding of parts this time around. These are cold cast high impact plastic parts and platinum silicone skins. Alans future may include a full body, if the Kickstarter is successful. And you can certainly use this as a replacement head for InMoov . I will look at altering the open source STL files to be able to accept my heads.
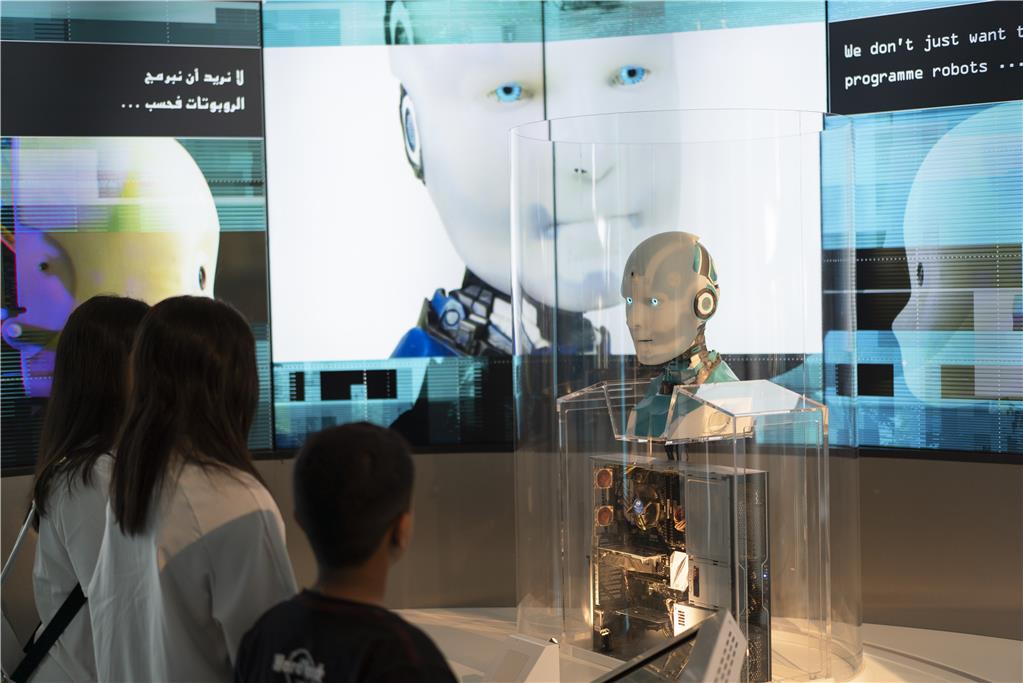
I always knew that the EZB would be Alan's brains. And I will promote it as such. As we all know, DJ's commitment and advancement to the EZB is leading us into the future of robotics.There really is no other choice in my mind. But that's in part because I'm no programmer D. Cochran's EZ-AI is a boon to Alans development. I look forward to where David takes it. And although I have it installed I have yet to implement it with Alan for a few more weeks. All of these working together will be highlighted on the Kickstater video.
D. Cochran's EZ-AI is a boon to Alans development. I look forward to where David takes it. And although I have it installed I have yet to implement it with Alan for a few more weeks. All of these working together will be highlighted on the Kickstater video.
I have several more weeks to finish the paint job and run a new hero silicone skin. Then there is the very important Kickstarter video. So we are at least 4 weeks out. But I will post here the links to both the Kickstarter and Alans website when they go live and as Alan progresses.
I look forward to your ideas for programming and how you would mod him. I'd also like to hear how you would like to see him develop. Thanks for your time and enjoy the development pictures and video.
All the best,
Will



Programming
Camera, Speech recognition, speech synthesis, pad touch,
Parts & Materials
Dynamixels, Arduino, USB camera, EZB 4, micro servos and regular servos
Discover more robots
Jstarne1's Build A Giant 3D Printer , Live Build, Come Join...
Mickey666maus's Hey Guys...This Adafruit 16-Ch


Man this looks super tight...sweet cable management!
Could you give us a hint on the hardware...looks interesting!
Such mind blowing amazing detail.
Amazing fxrtst
;)
Thanks guys.
@mickey666maus, yes I can talk about anything except where it's going
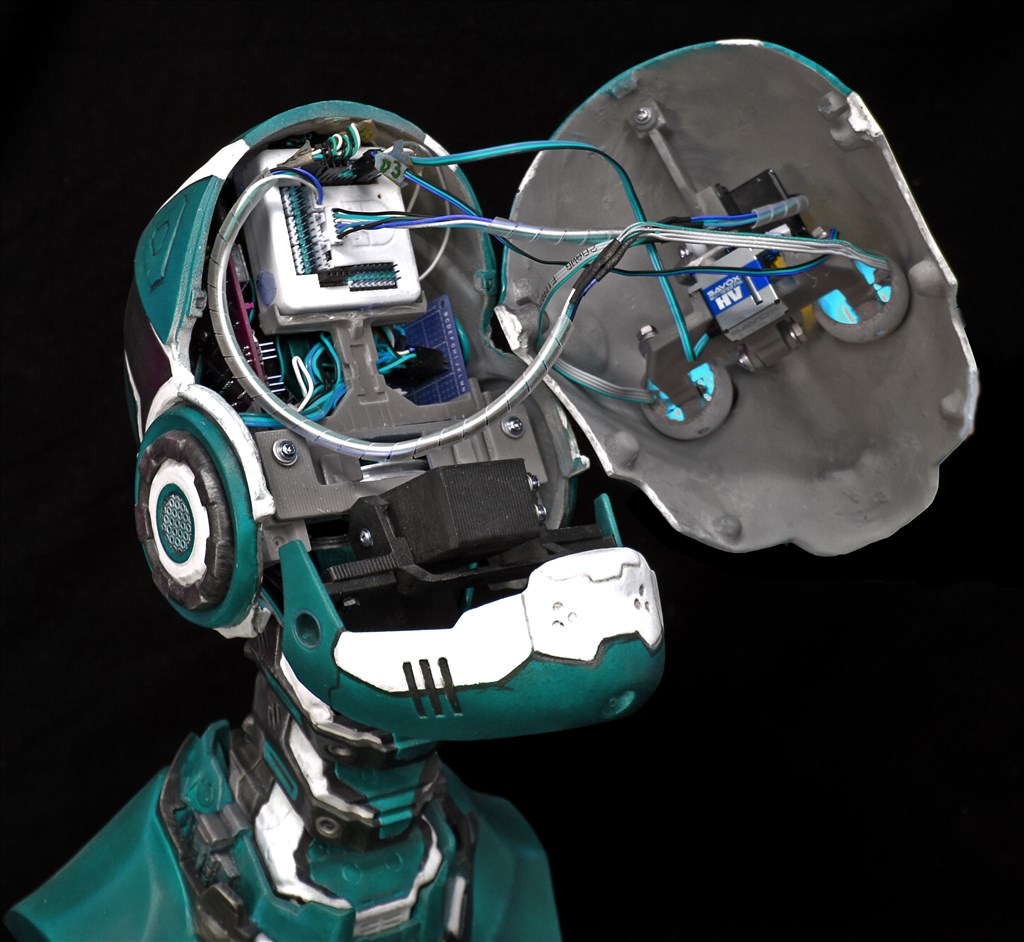
It's pretty much the same set up as the original prototype of Alan, but a redesign on the parts to be milled in aluminum. I also had the frame water jetted in .25 inch aluminum plate. I also designed the eye mech to be part of the machined parts which is different than the original Alan where the eye mech was attached to the skull face.
The servos break down: three Dynamixel mx 64s, two for the new neck tilt set up and one for head rotation. These are game changers. Very expensive but worth it on certain projects. They are very powerful and very very quiet. Then there are the two micro servos from hitec for the eyes. The servos were chosen for speed, since there is no real torque needed for the eye mech. The final servo is the jaw servo. Because lip sync is controlled by a separate audio board, there are some limitations on the type of servo. You have to use a analog servo to get reliable results. It's very difficult to find a fast analog servo these days as most are now digital. But I managed to source a few hitec and found one to work.
The boards use are: EZB for the controller, the audio servo control board for jaw and lip sync. I soldered together a small power distribution board. This board takes the 12 volts required for the Dynamixels and using a castle Bec I down convert to 7.4 volts for the eye servo and the audio board, then another Bec set at 5 volts for the Leds. The power comes from TRC Electronics, 30 amp 12 volt power supply. I 3D printed a partial enclosure for it. And then created a I/O port on the bottom for all the connections. The way it's being set up by the client, all the connections need to be on the bottom of Alan.
The aluminum frame is attached to a 3D printed base made from PETG ( my new fav material), this base sets inside the shoulders. The frame continues up to a no-backlash u joint then a aluminum base sets on this. Two rods are connected to this base then to the two dynamixels in the shoulders. By creating a touch pad control I can add each Dynamixel to X and Y to control the neck tilt. It's a bit wierd as I have to go in an "x" pattern on the touch panel to get the neck to perform correctly. As we continue to move up the upper disk is then connected to the main head base. Everything is connected to this base, the jaw, the head rotation Dynamixel , eye mech etc. The eyes use what I call the e-bar set up, one servo controls up and down and one left and right.
The Led set up includes two blinkM minM for the eyes. The back of the head array consists of two banks of 16 neopixels for a total of 64. The neopixels are controlled by a Flora 3 from adafruit.
I think that's everything. Let me know if you have specific questions.
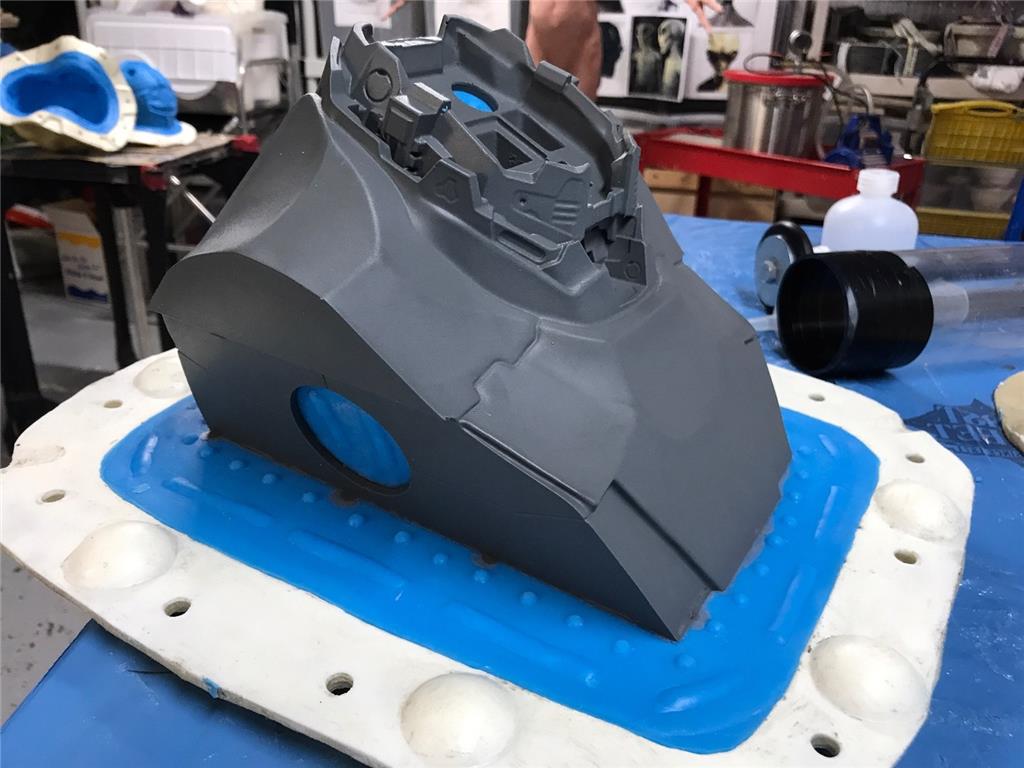
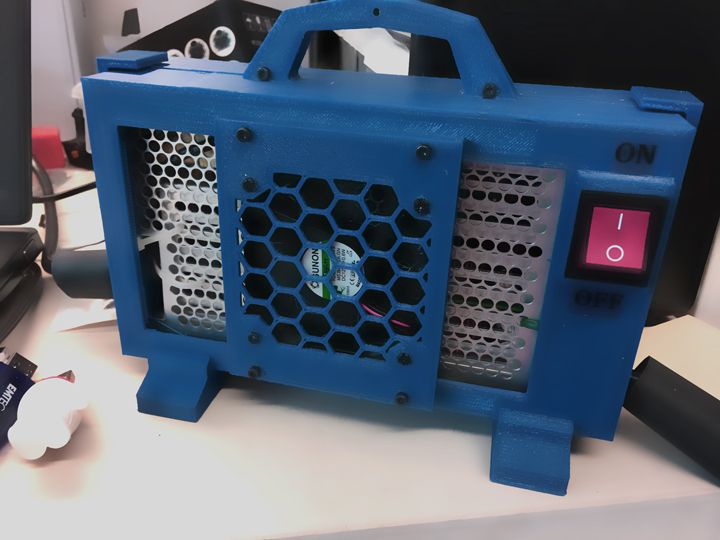
Below: Power supply case 3d printed and fan added. not needed as it stays cool even at full load, but hey its there to make me feel good!
Pictured below: The bottom plate I/O board. Here are all the connections for Alan, on the left are the two usb ports, one for connecting directly to the EZB, the other for the usb camera 1080p. In the middle we have the power connections, and audio in and audio out on the right.
Will, che k your email.
Hey there I managed to get both going at the same time but no dialog between them yet.
Omg....that was just fantastic!
Im speechless got nothing else to say...
But wow the mouth movement...just wow....told you...speechless.
Thanks.
Man! I can clearly see the time, the thought and all the love you put to this project! It's been clearly a lot of revisions that made the product so outstanding and clean!
Thanks so much for letting us participate!