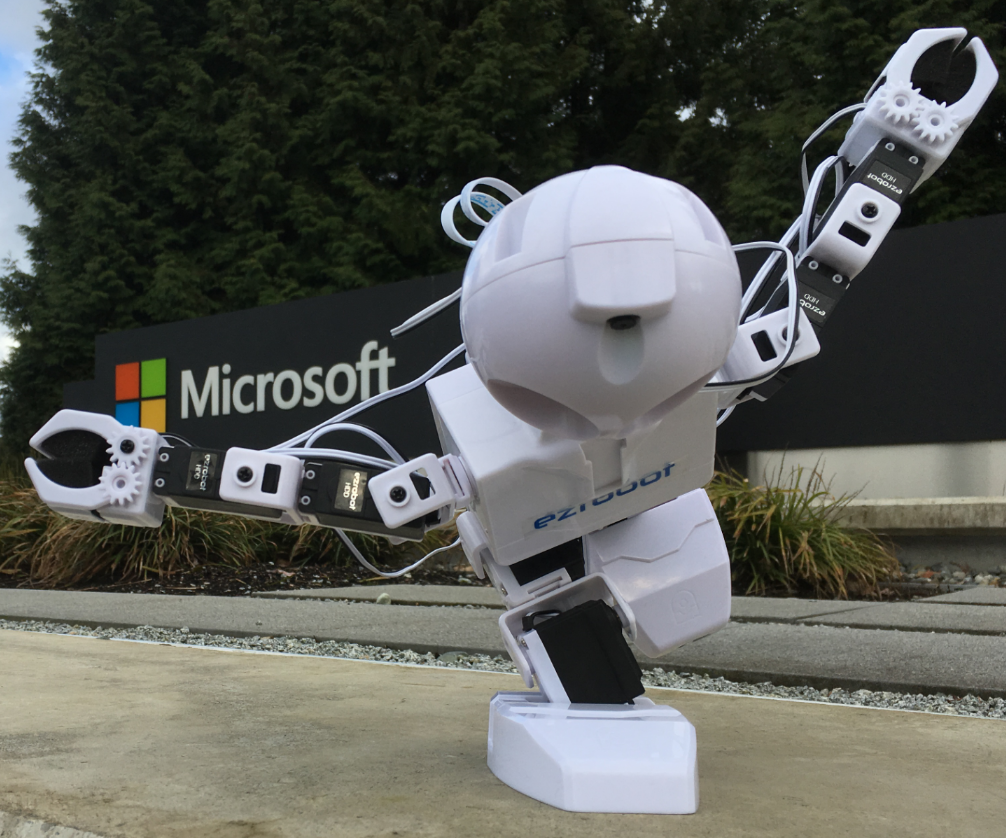
Baxter is an unauthorized clone of EZ Robot's JD Humanoid robot.
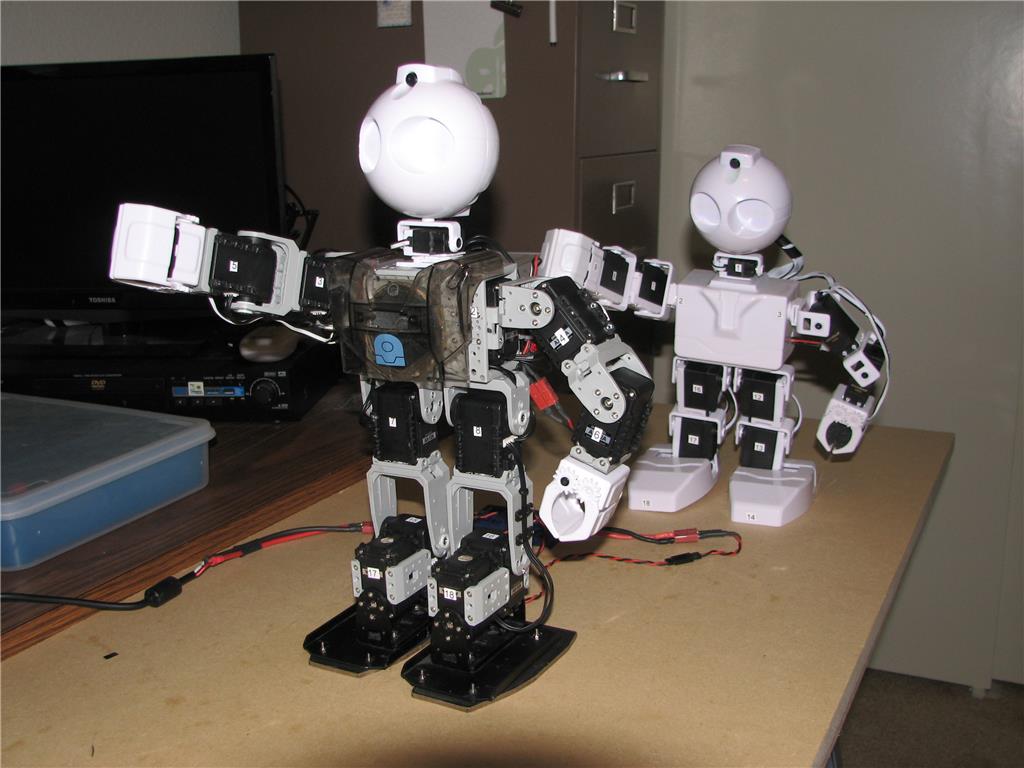
His full name is: JD (Tiny) BAXTER, Wip We just call him Baxter.
JD because he is clone of EZ Robot's JD Humanoid robot. (Tiny) because his controller is the EZ-B ioTiny. BAXTER is from: EZ-B4 controller, AX-12 servos, Tethered Robot. Wip because he is a Work in progress.
Baxter has EZ-robot head and grippers.
His "chassis" is from a Robotis Preamium Bioloid robot kit.
The 12 AX-12 servos have been mounted in the JD configuration.
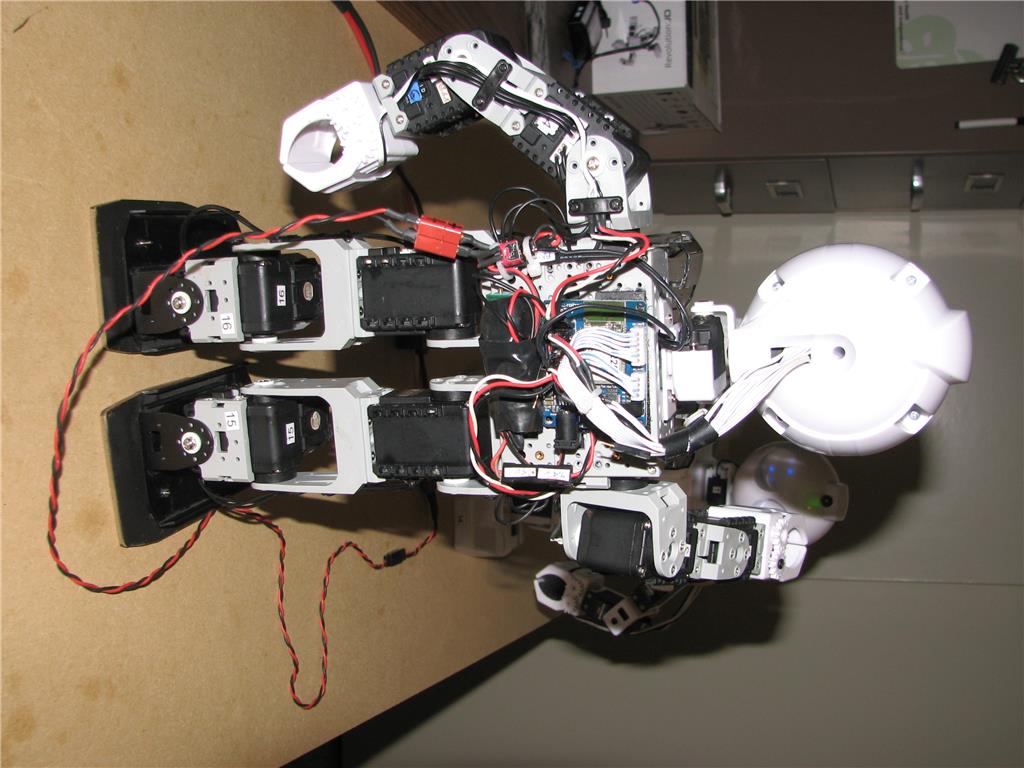
Power is from a 12Vdc Supply. 12 Vdc for the AX-12 servos.
A power distribution board has 7.4 and 5 Vdc regulators,
7.4V for the EZ-B4/2 controller and it's servos, and 5V for future sensors.
The ioTiny uses port D5 configured as a TX only UART. This is set up with the new Dynamixel Plugin.
Baxter can do many of the JD Actions including: Bow Wave Thinking Point Head Bob TMCA Dance Walk forward, left, right, and backward Sit Down Sit Wave Get Up
After working with the AX-12 servos for quite a while, I offer the following advice:
Get a Robotis USB2DYNAMIXEL adapter (from TrossenRobotics). https://www.trossenrobotics.com/robotis-bioloid-usb2dynamixel.aspx This adapter allows you to use the Robots RoboPlus Dynamixel Wizard to verify the proper operation of the servos, set the Baud rate (must be 115200bd for Tiny), and see and set the ID for each servo.
Get several AX-12A Gear Sets. AX-12s are great servos but the gear train is plastic. If the servo is run hard against a blockage or jammed when in motion, a gear will strip. Replacement is easy and showed on the Trossen site: https://www.trossenrobotics.com/p/ax-12a-18a-gear-set.aspx
If you are going to use EZ Robot frame positions, or you want to move the AX12s from 0 degrees to 180 degrees, know that the EZ servos run from 0 degrees to 180 degrees but the AX-12 servos run from -60 to 240 degrees. The ratio of 180/300 is .6 ?
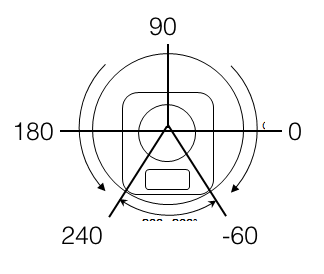
A way to calculate the AX12 value for an EZ position is: take the difference between the EZ position and 90, multiply that by .6 then add or subtract to/from 90.
If the desired AX-12 position is greater than 90 then the EZ value is 90+(x-90).6. Example: The desired AX-12 position is 180 degrees (x) then 90+(x-90).6 = 144.
If the desired AX-12 position is less than 90 then the EZ value is 90-(90-x).6 Example: The desired AX-12 position is 0 degrees (x) then 90-(90-x).6 = 36.
- Very important! if you want the 0 to 180 degree rotation for the AX-12s, set the min and max values for each servo in a script.
SetServoMin(V1, 36)
SetServoMax(V1, 144)
#Set for each servo
Baxter's EZ Cloud title is: JD (Tiny) BAXTER, Wip Video ASAP
I welcome comments, suggestions, and constructive criticism.
Discover more robots
Chris9's Jd's Adventures At Microsoft

Ezang's The Borg - Resistance Is Futile, You Will Be...


Now your $1000 robot is as smart as JD! I need to do this!
@ mcsdaver,
As smart maybe, but he doesn't move as well.
very cool , any idea how his big brother Thormang 3 cost?, I just discovered that company on youtube just now and very interested in the larger Thormang kits.
Hey Robo i just noticed i answered your question in your T3 thread.
Baxter the bigger brother, oh because of the TrossenRobotics links?
He mentioned the parts came off Robotis one of the smaller robots they sell,same company builds Thormang 3. https://en.robotis.com/index/product.php?cate_code=111410
@mcsdaver,
are they really worth $1k..? eek
I suspect possibly 5k for the large Thormang units if not even double,not sure since you must email them for a price, I believe the Chappy movie used these guys too so they are real and work very well.
@NewAgeTomy Yes these robots cost $1000 and no they are not worth the price. For $1000 you get a almost blind robot that only hears a loud clap and can't see in color. It won't talk or do voice commands, also my Bioloid falls when he walks. JD is much more fun!