



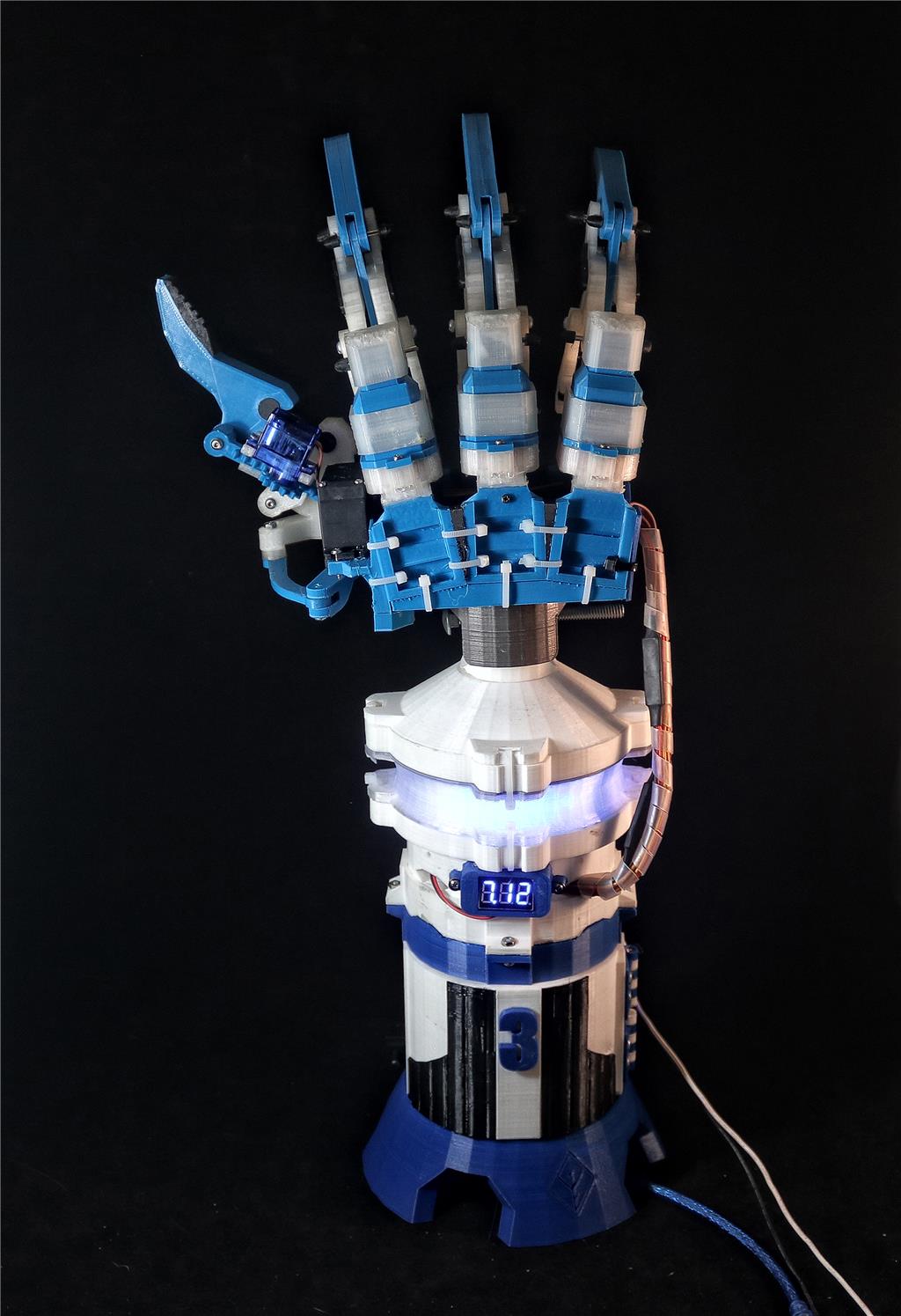
Hey all! just wanted to show off my finished robotic hand design! Designed entirely from scratch, including DIY linear actuators using standard servos. Powered by arduino and programmed using synthiam/ez-robot software! Thank you for continuing to develop such great software for us inventors to use in our projects!

By TheTechnomanc3r
— Last update
Other robots from Synthiam community

DJ's ARC Overview
The ultimate robot software ARC is leading the way for the next generation of robotics. Heres a short video I put...
Mac's Irobot - Progress
I just typed a long update but lost it when the page refreshed. Ugh, when will I learn to write these in Word first?...

Gwen4156's The G-Bot (Gwen's B9 Robot Project) Gets His...
Took the G-Bot outside for the first time with him fully built up... Nerve racking to say the least... The bad new: He...

Very nice!
Yes I will also watch your future videos
be well
Wow! Amazing work @TheTechnomanc3r
I always enjoy your projects as you put a lot of creativity into them.
Did you come up with the rotating thumb idea? I've never seen that before. Is there a story behind it?
Supercool!! Keep up developing, it came out great!! :)
Very cool ! its so amazing what we can do with servos and a 3D printer.
its so amazing what we can do with servos and a 3D printer.
EZang60 - Thanks! Glad you like it!
Jeremie - Thank you! I actually work as a profession artist as my day job, so I guess some of that aesthetic naturally translates into the robotics as well! The thumb was actually just something I came up with as sort of a workaround to fit all the servos while still having a lot of motion. I made it sort of a goal to make the hand have more motion than a lot of the other humanoid robot hands out there, I thought it would be cool if my robot could give me a "thumbs up" when I finally finish it! haha
Micker666Maus - Thanks! I definitely have big plans for this project!
Robohappy - Oh definitely! Getting my first 3d printer was a game changer for robotics!
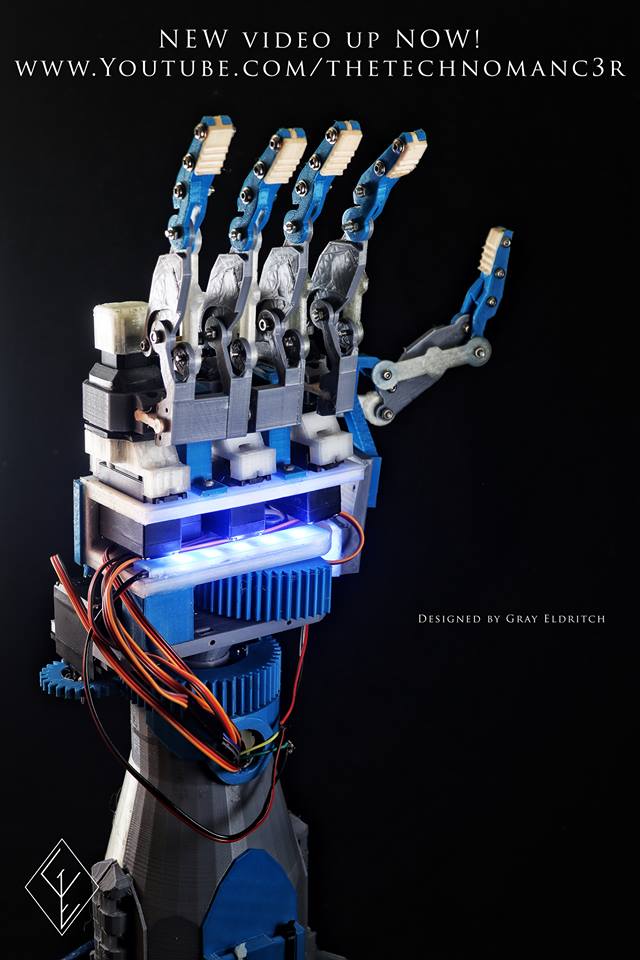
Here's an update! I made an alternate version of this hand that has slightly less motion, but is lightweight and uses fewer servos. We'll call this one "Mk 2b"
Another update! Here's the start of "Mk3" - the "finalized" version of my hand design (at least for now) - the forearm is done too, I still just have to finish the video!
Wow - don't know how this slipped by me. Fantastic!!!! Super impressed because humanoid hands are a big deal right now. Lots of people are trying different methods of doing it and you seem to have a great design.
Thanks DJ! I've been working on it for a while! Getting your stamp of approval is awesome!
I’m definitely going to show this off. I was in a meeting last week in Beijing with a robot company that spent a ton of effort building the hands. I showed them the inmoov and they were blown away. The inmoov doesn’t have nearly the dexterity that yours do - so I’ll be showing them this
Oh man,this is too cool. I just started researching how to build better robot hands!
That would be awesome! Funny you should mention the inmoov, I actually built one too (powered by an EZB-4) and I am a huge fan of Gael's amazing design! So that was part of the inspiration behind deigning my own separate robot arm, which was more focused on precision/mechanical parts and adding as much motion as I could, plus the hand is all self contained leaving the forearm free to house all the electronics.
Funny you should mention the inmoov, I actually built one too (powered by an EZB-4) and I am a huge fan of Gael's amazing design! So that was part of the inspiration behind deigning my own separate robot arm, which was more focused on precision/mechanical parts and adding as much motion as I could, plus the hand is all self contained leaving the forearm free to house all the electronics.
Nice! Love your 3rd hand version.
Just wondering why you lost the 4th finger? I'm really interested in your thoughts here.
I think the hand is spectacular. more information about the servos would be great. having built two inmoov robots I am always trying new upgrades for my inmoov . and theTechmonanC3r more information on your inmoov would be most helpful you should start your own thread under Robots.
Can you show me the technical drawing?
The arms length is very interesting on your Inmoov ,I am interested what servos you use to lift all that weight?
Dave Schulpius- Thank you! Basically what it comes down to is, I was designing a robot hand not a human hand. Removing a finger just allowed for a more efficient design, remove weight while using fewer (while using stronger) motors, and allowing for a fully modular and ambidextrous design (no need to mirror parts, the whole design is symmetrical minus the thumb actuator.) design! I'll explain it fully in the next video! :)
Nallycat - Will do! I've been meaning to share more about my inmoov project on here, as it is also synthiam /EZB powered. However the hand in this thread is my own separate project, which was meant to challenge myself and is 100% my own design, that being said, it's (at this moment) not inmoov compatible or intended to be. However it does use the same size servos (such as an mg996r, ezb servo, or similar size) as a standard inmoov build. :)
joinny- Right now I am not sure how I want to release this project to the public, it will be available to everyone at this early development point, but right now since it is my own original design I am working through the whole copyright process before either releasing it open source or as an educational kit. Im sure there will be an open source version available soon though, so stay tuned
Im sure there will be an open source version available soon though, so stay tuned hint
hint
Robo Rad- I am a little confused as to what you're asking, so I hope I'm understanding, the hand in this project is completely separate from the inmoov and is sort of its own project, and at this moment aren't compatible (maybe someday though! I was just responding to DJ's comment). My inmoov's forearms are Gael's original design and use the same servos, however I have made my own custom hands and Aerius' elbow re-design, if you're interested I'll totally post more about my inmoov on here soon like Nallycat suggested! Ive also made a few custom inmoov parts, I'll be sure to release the stl files here! :)
Ive also made a few custom inmoov parts, I'll be sure to release the stl files here! :)
UPDATE! The hand is done! Well, version 3 that is. The rotation wrist and hand are fully functional. Once the hackaday.io contest is over I plan to open source these designs in some form, so you all will be able to build your own :)
Finished build video:
My hackaday project link: I'll be posting updates here! https://hackaday.io/project/165067-a-modular-and-ambidextrous-humanoid-robotic-hand
Such a cool clip, nice intro...good lighting and of course great work!! Keep it up!! :D
Hey all! So sorry its been a while since I updated this project. Its still under works, but I had to take a bit of time to design the body.
A bit of good news for you all as well! I have decided to share and open source the files. I just have a few adjustments to make and film a tutorial! I do apologize to those I was hesitant to share the files with, I am an artist and special effects producer by profession, so its been trained into me to keep my work a little exclusive. But robotics fields are a different animal and I want to see the project grow and progress! The tutorial will go up on www.youtube.com/thetechnomanc3r soon!
I have decided to share and open source the files. I just have a few adjustments to make and film a tutorial! I do apologize to those I was hesitant to share the files with, I am an artist and special effects producer by profession, so its been trained into me to keep my work a little exclusive. But robotics fields are a different animal and I want to see the project grow and progress! The tutorial will go up on www.youtube.com/thetechnomanc3r soon!
https://www.instagram.com/p/B8i8CaxHaZO/?igshid=9ezzraytyrzu Here’s a video of the arm movement at an art gallery last week!
Great work..just subbed the channel!! :)
Sweet. Thanks for making this available to the community. Welcome back. You do great work.
Great videos, the hand moves very fast for actuators, when will the .stl files become available, as printing all the parts will take some time, having the printed parts completed and ready for when you produce you tutorial, would in my view the better way to go. and you would get feedback on printing issues that may arrise.