












































By David mcsdaver
— Last update
Discover more robots
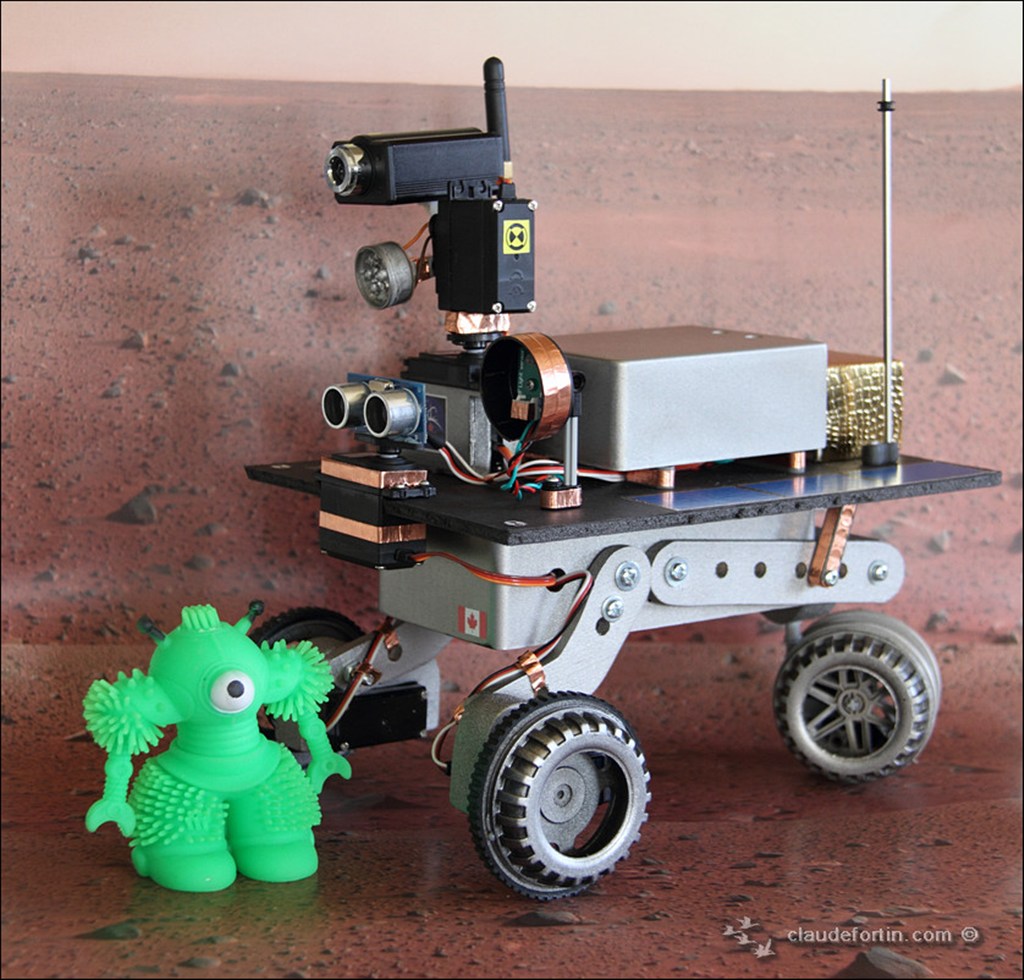
Clode's The Canadian Mars Explorer :-)
Canaxplorer Canadian Mars rover controlled by EZ-B with camera, ping sensor, light sensor, buzzer, spot light and future...

PJ's Ez-Truck
Convert an R/C truck to EZ-Robot using EZ-B v4, IoTiny, L298N H-bridge, HC-SR04 sensors, servos, camera and scripted...

Robohappy's Cybot2.0
Cybot 2.0 updated with compact head controlled by an Acer W3, featuring speaker, ezb camera and RGB animator, expandable...

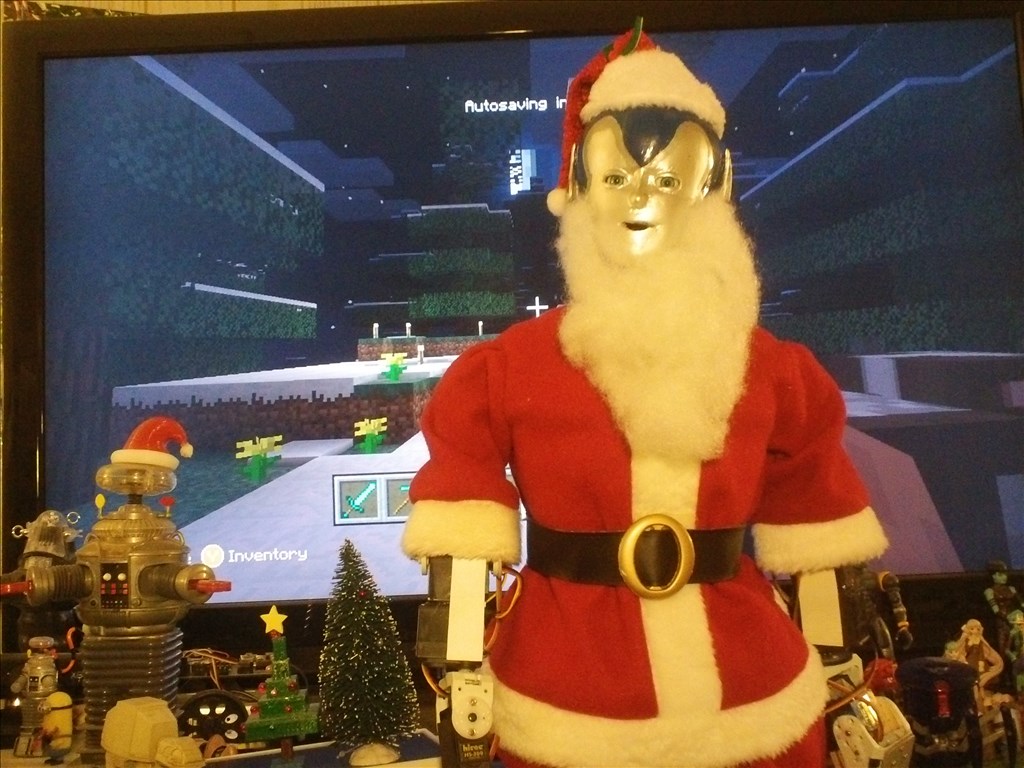
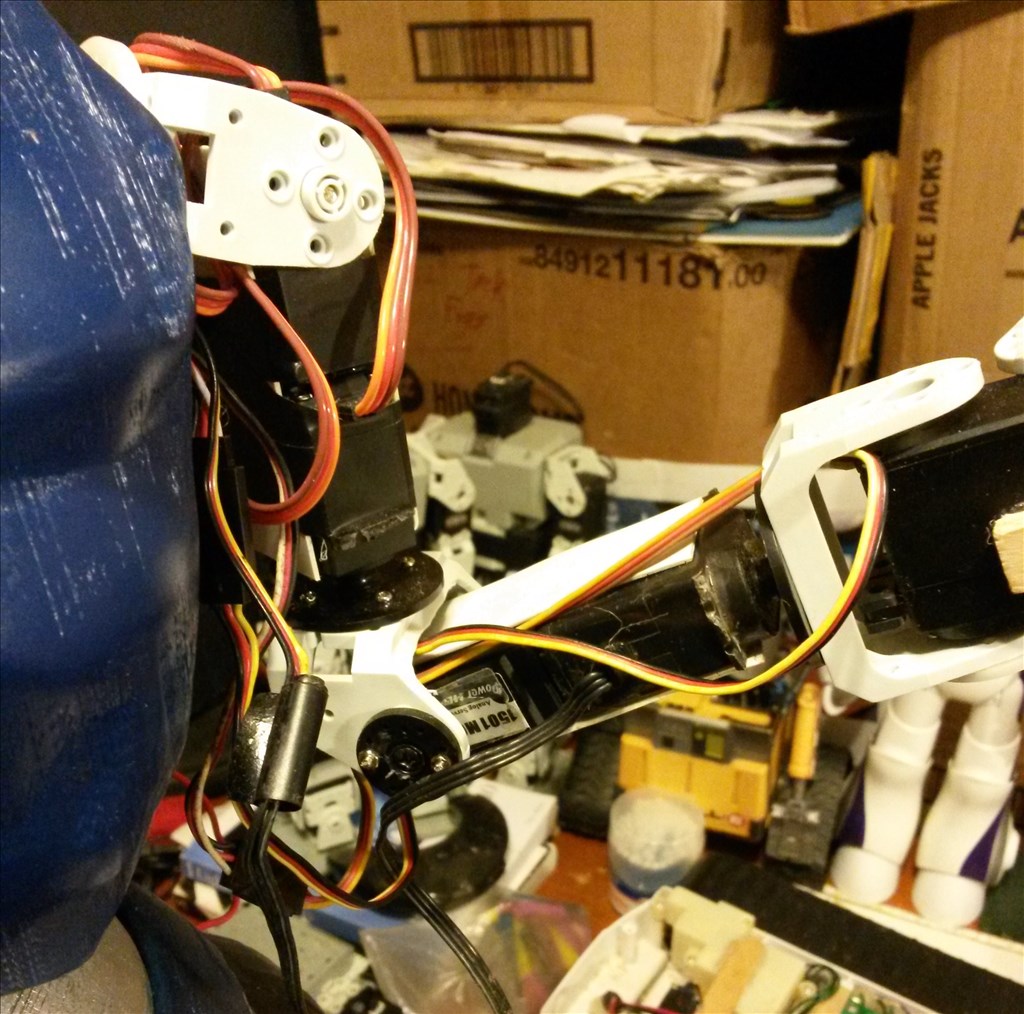
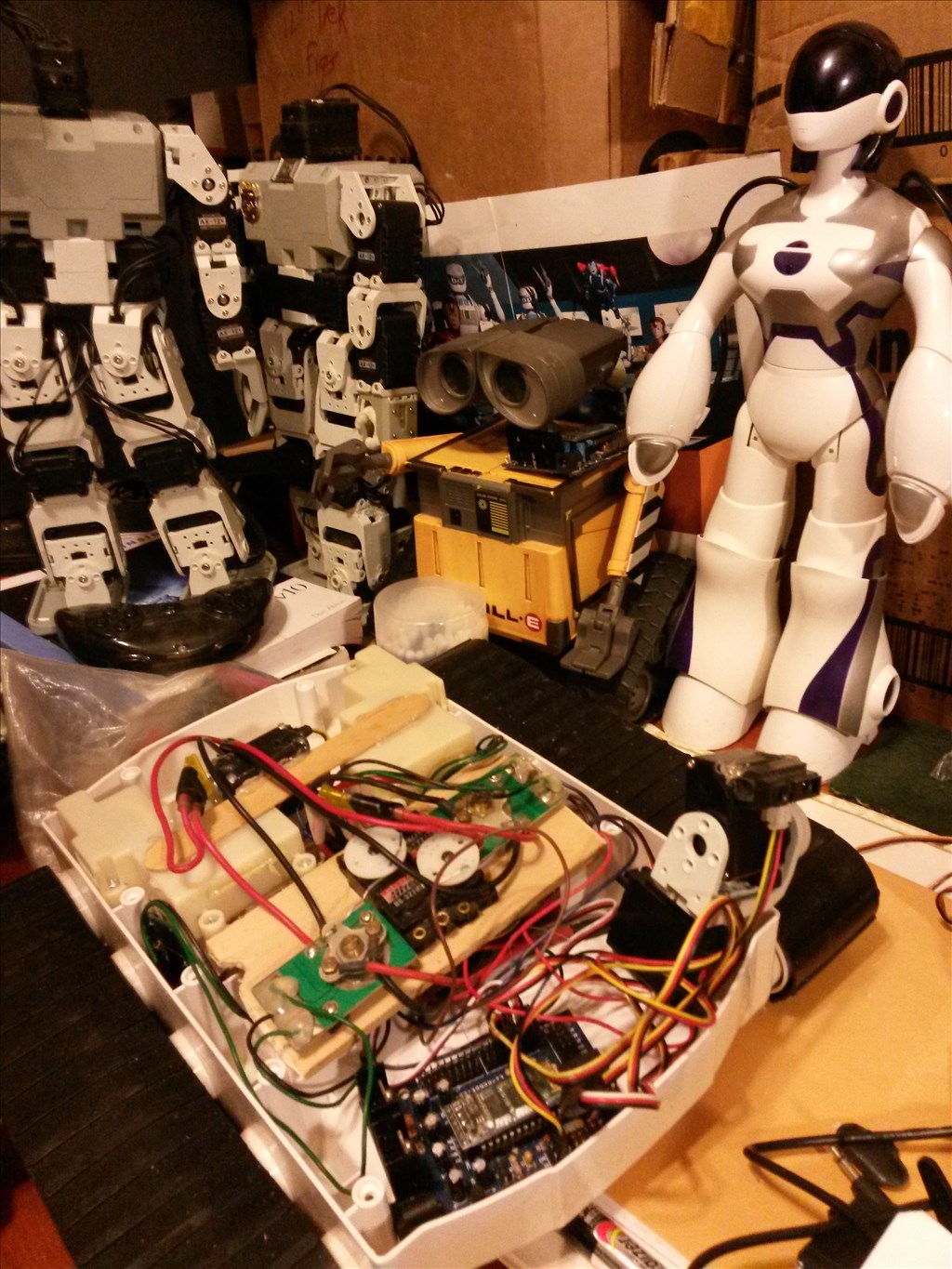
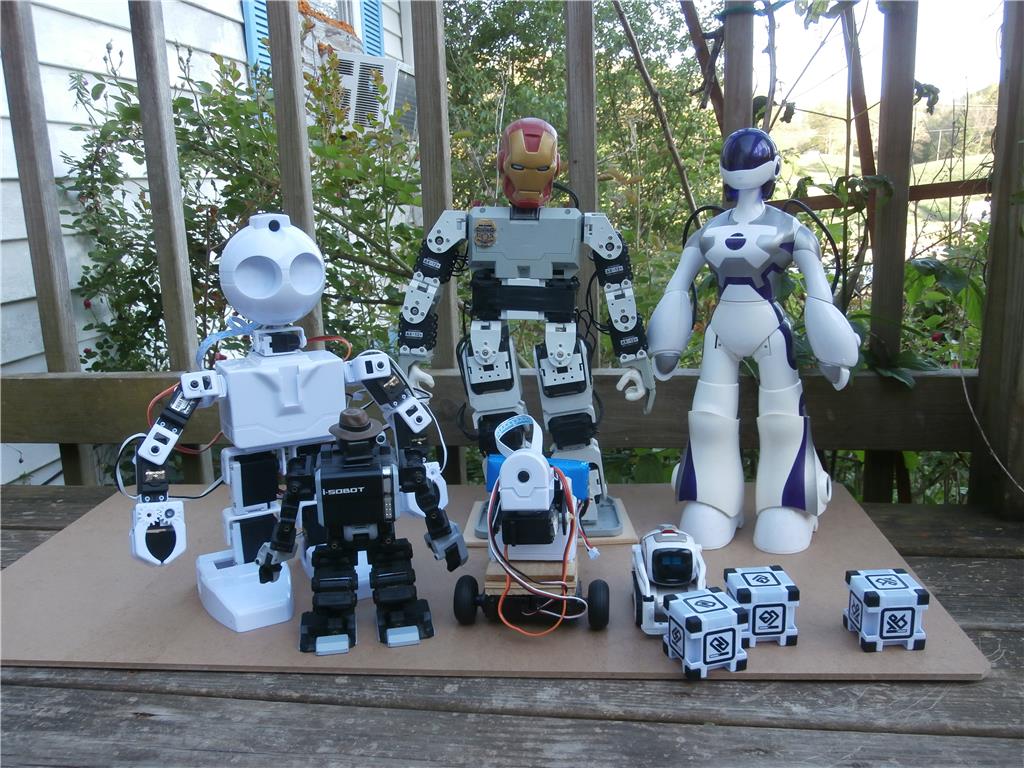
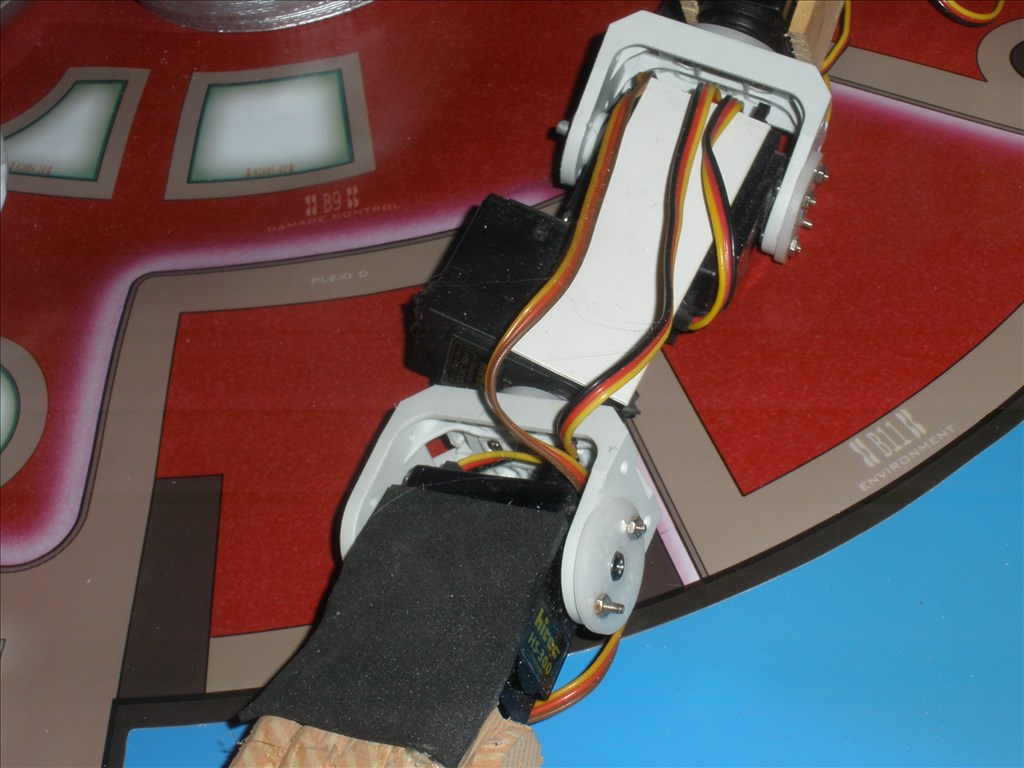
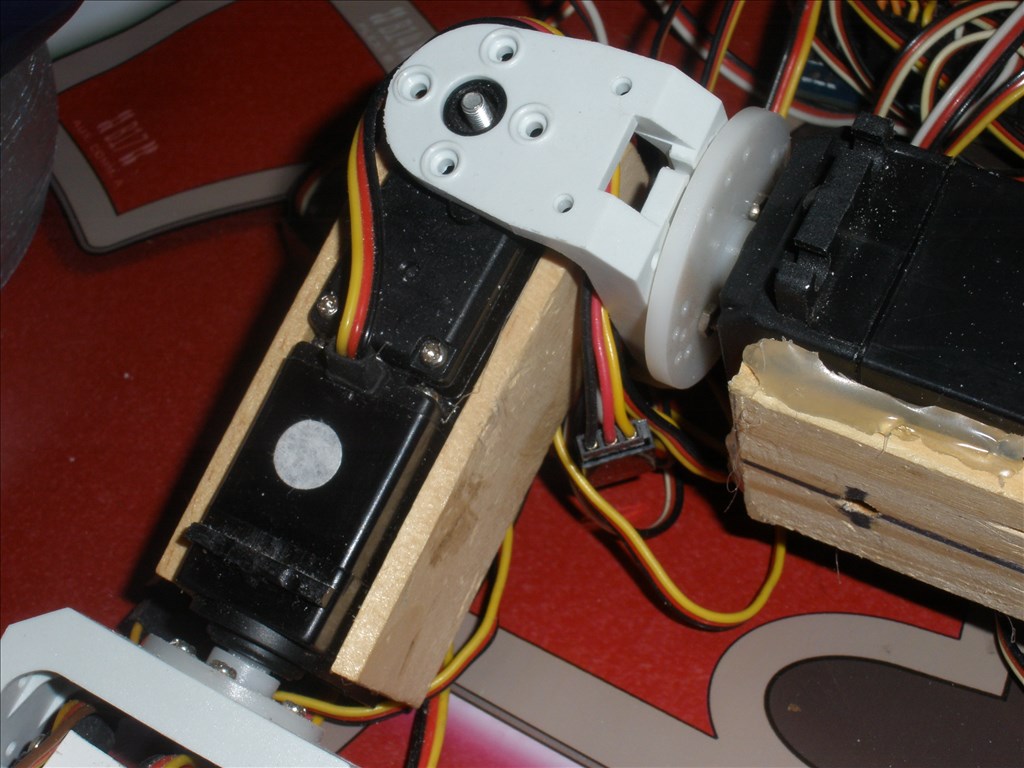
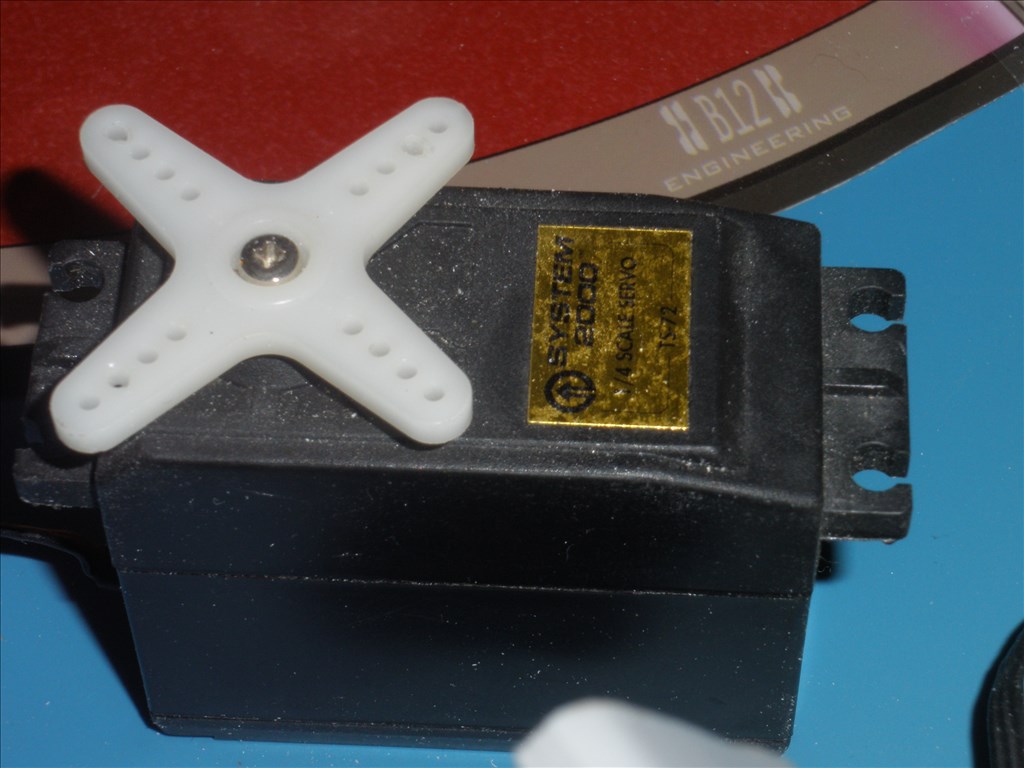
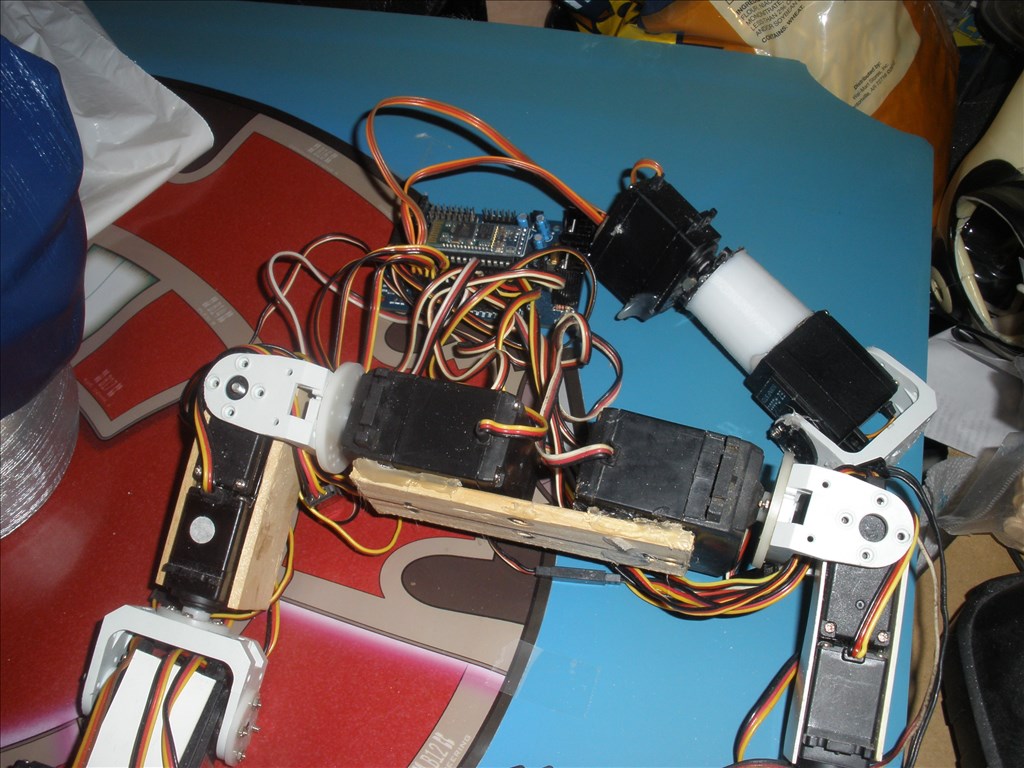
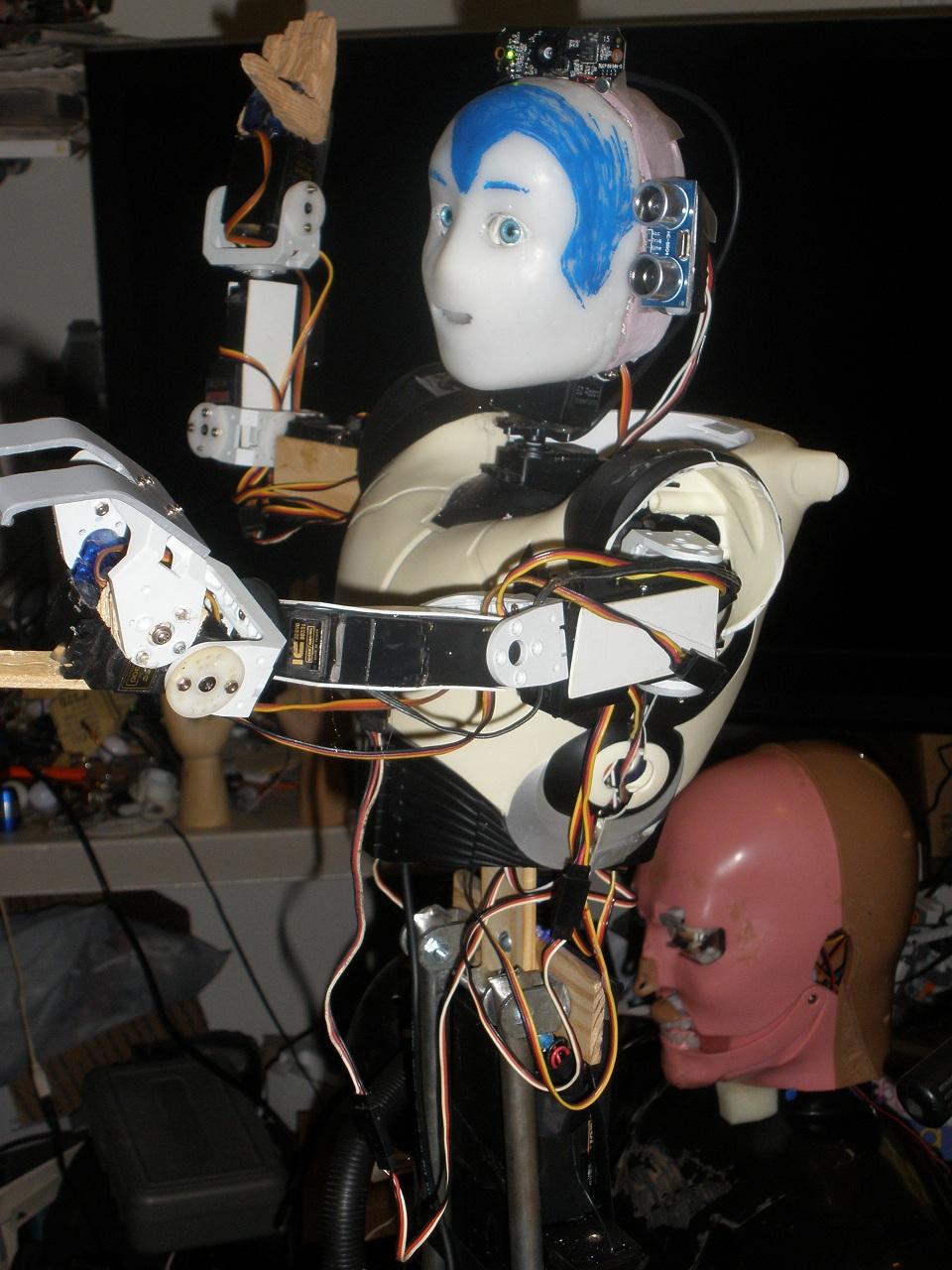
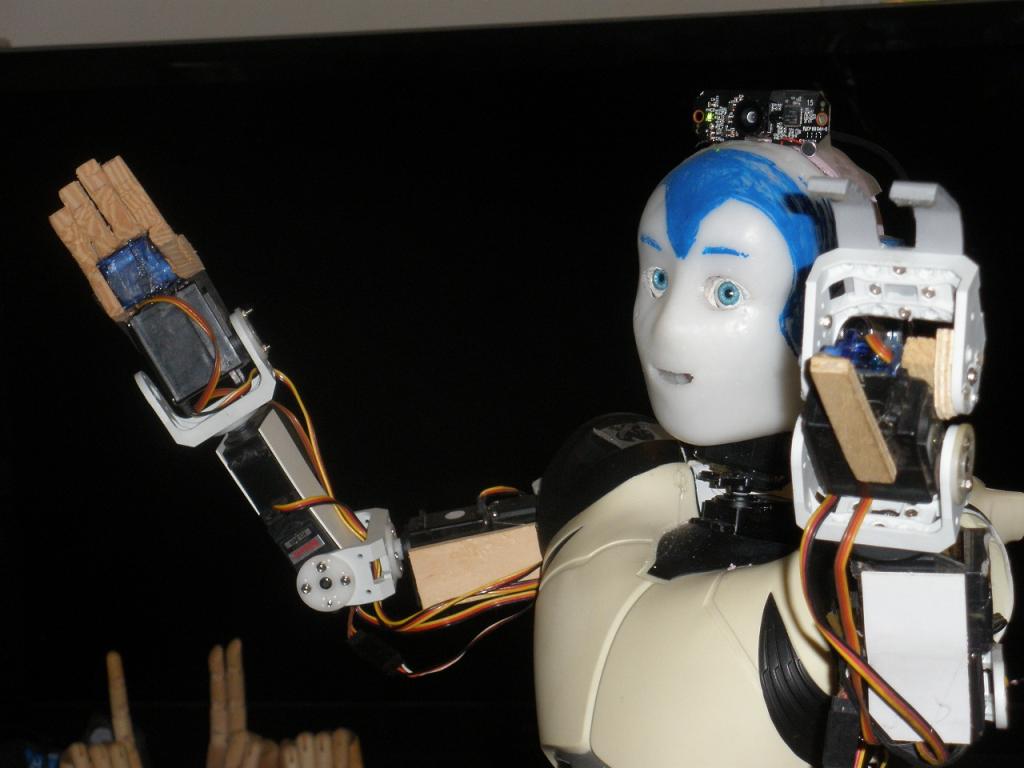
EZ Robot board can move all 16 of his servos at once. Some of those servos are large 1/4 scale servos. I will need a second board for the waist , legs and feet motors. I need to convert the motors into servos. I hope to get him to walk The feet I will be using can hold 3 D batteries each to provide power for everything. If he weighs too much I will use lighter more powerful batteries. His head is not close to being finished. I just put everything together for a test. I need to build his legs. Right now he has 2 poles and wooden feet to keep him standing. The feet are clamped down to the table.
Thats so awesome! I would love to have a humanoid robot. I will let you pioneer that for now seriously great job though. Once you get him the way you want you could vacuum form carbon fiber to replace your bracket s and hands to save lots of weight. Since you have the means to vacuum form it should be right up your alley.. why dont you use a couple turnigy 2100 mah lithium batteries they are about the same weight as d cell batteries but higher capacity and rechargable
seriously great job though. Once you get him the way you want you could vacuum form carbon fiber to replace your bracket s and hands to save lots of weight. Since you have the means to vacuum form it should be right up your alley.. why dont you use a couple turnigy 2100 mah lithium batteries they are about the same weight as d cell batteries but higher capacity and rechargable
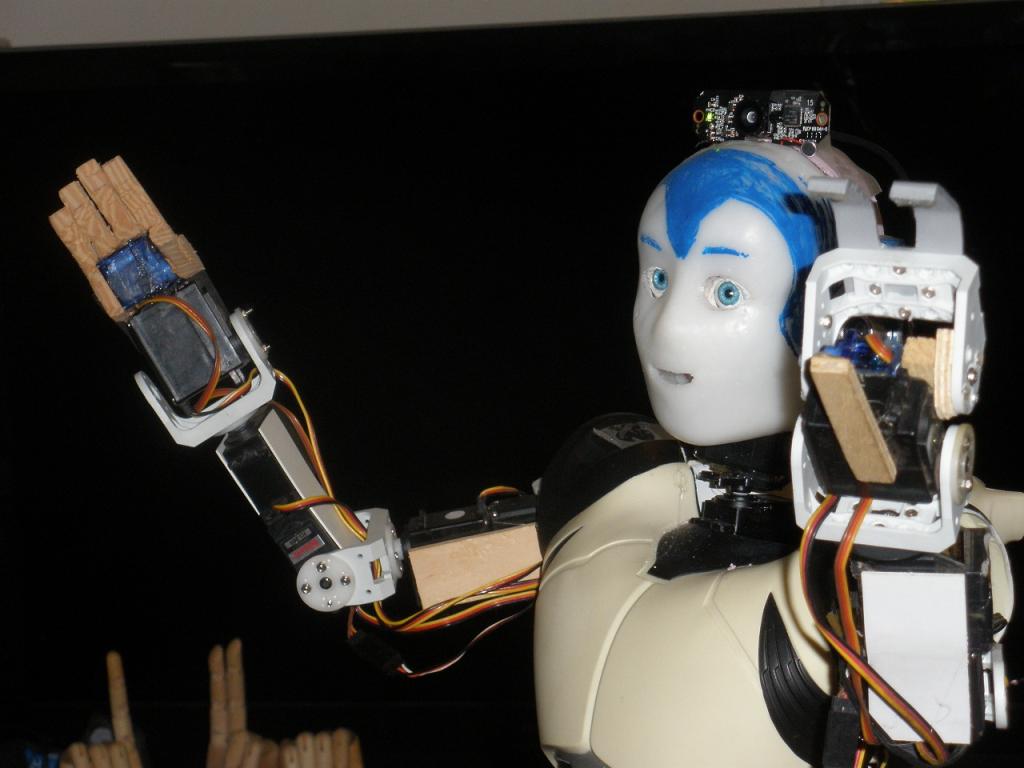
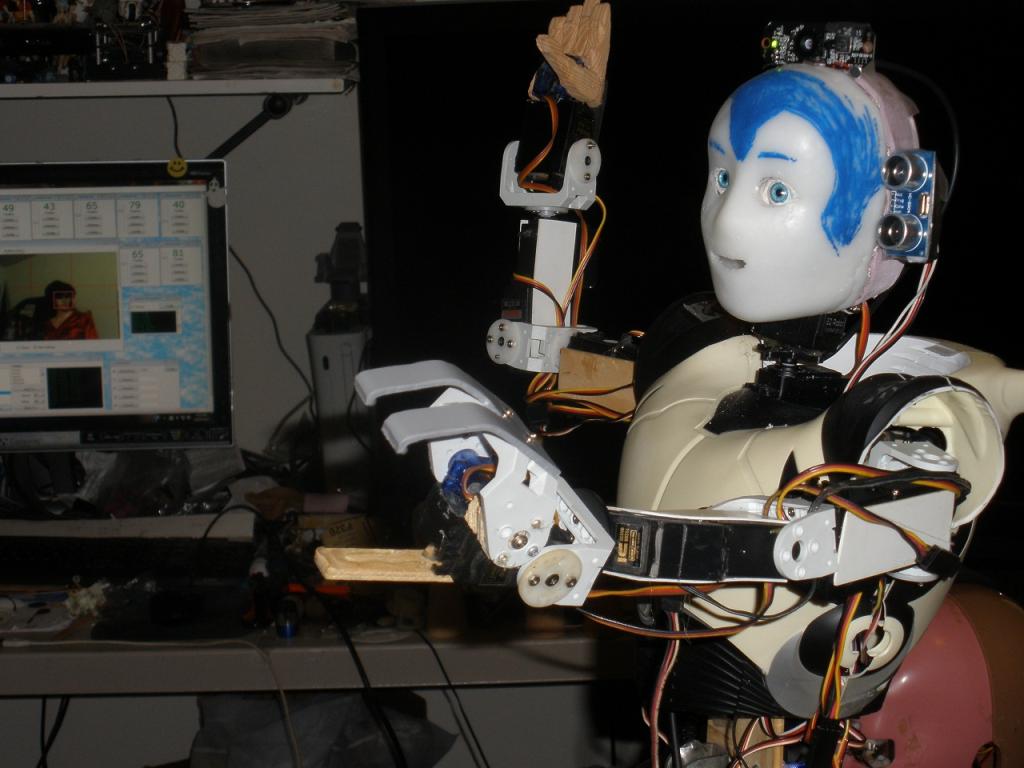
The latest update from DJ Sures makes controlling a humanoid robot so much easier. Now I can setup the movements to make the robot wave and then say hello and the robot can say hello and wave. Plus once he has legs the move command can control his walking. He could track a red ball and follow it around. The legs will take some time as the Robosapian legs are too short. Where his foot is will be his knee. I hope I can make him walk. Robosapian V2 can turn his waist side to side, lean side to side and even lean forward and backward. The legs only have one motor each to move then back and forth. Because he can shift weight from foot to foot he can walk. Because my robot will be taller and carry more weight it will need to time everything better to walk. I will need to give him a gyro so he can balance himself. I am building him a new right hand. I never worked with carbon fiber, but yes to get it stronger and lighter it would need vacuumed to get out excess resin and make it lighter and stronger.
Amazing ! Really good job. Post some video's please.
Greetz,
PhG
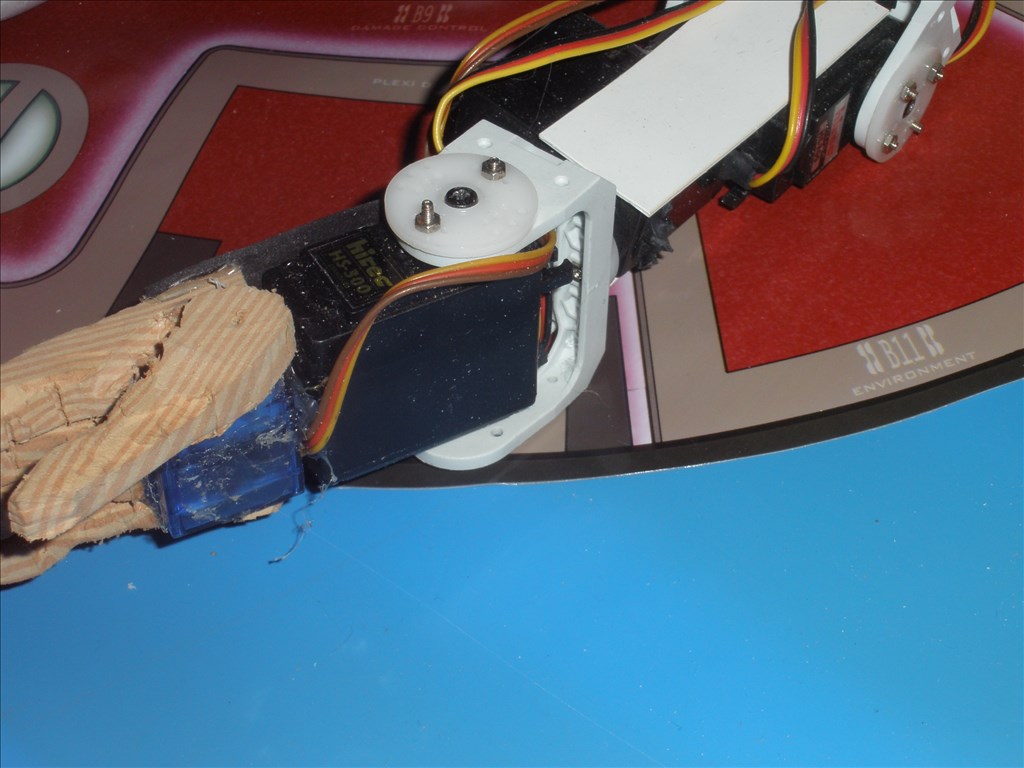
I have been working on his eyes. Ordered a few from China. His left gripper works, his right hand moves but is not able to grip anything.
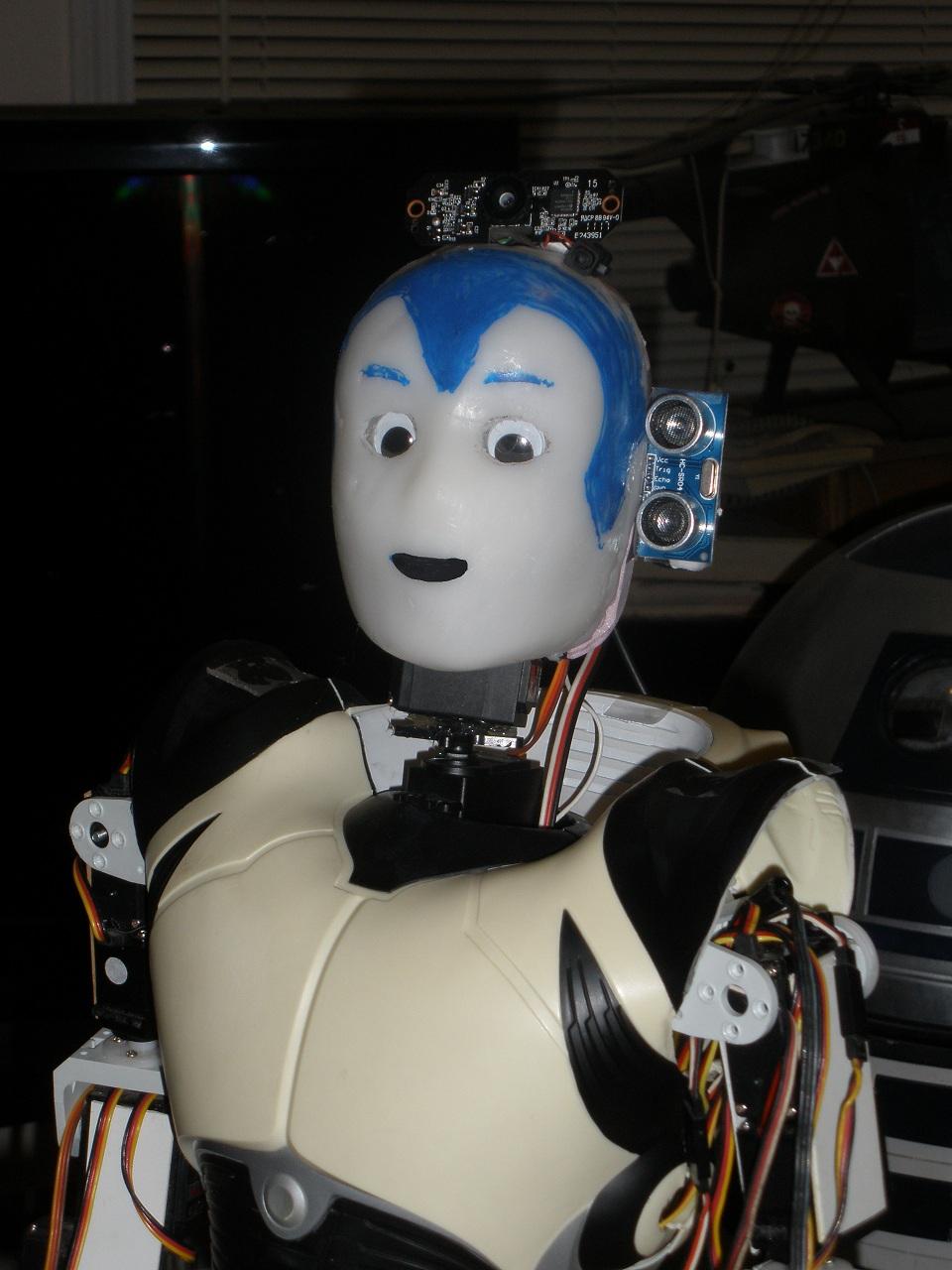
The video camera will be hidden in his mouth unless I can find very small cameras.
I will be painting his head when I get it closer to finished. Right now the blue paint is just there to show what will be blue the rest of his face will be silver.
Hand moldabl Plastic Link
This is a link to the plastic I used to make his head and face.
Wicked cool!
My video camera is charging or I would have included some video. I need to make his mouth a little bigger so the camera will be able to fit in his head and see.
My next project is a full scale android using parts from an Elvis Alive robot and molding rubber skin from a mannequin. This will take some time to build. I have 2 Elvis Alive robots. One doesn't work so it is apart now and soon will have a female face over the servos and motors.