

Hi Friends!. well I'm finally ready to put my full size R2 to roll... But I need a tip from you. What kind of H-Bridge or controller do I need (or can I use) to use with my ez-b ? I believe that the regular one will not be able to power this Scooter motors that i'm using.. am I wrong ?!


By tevans
— Last update
Discover more robots

Bhouston's A New Hand For Inmoov?
InMoov hand hack: Exiii Handii modified for independent finger control, wrist with EZ-Robot lever servo, EZBv4 control...
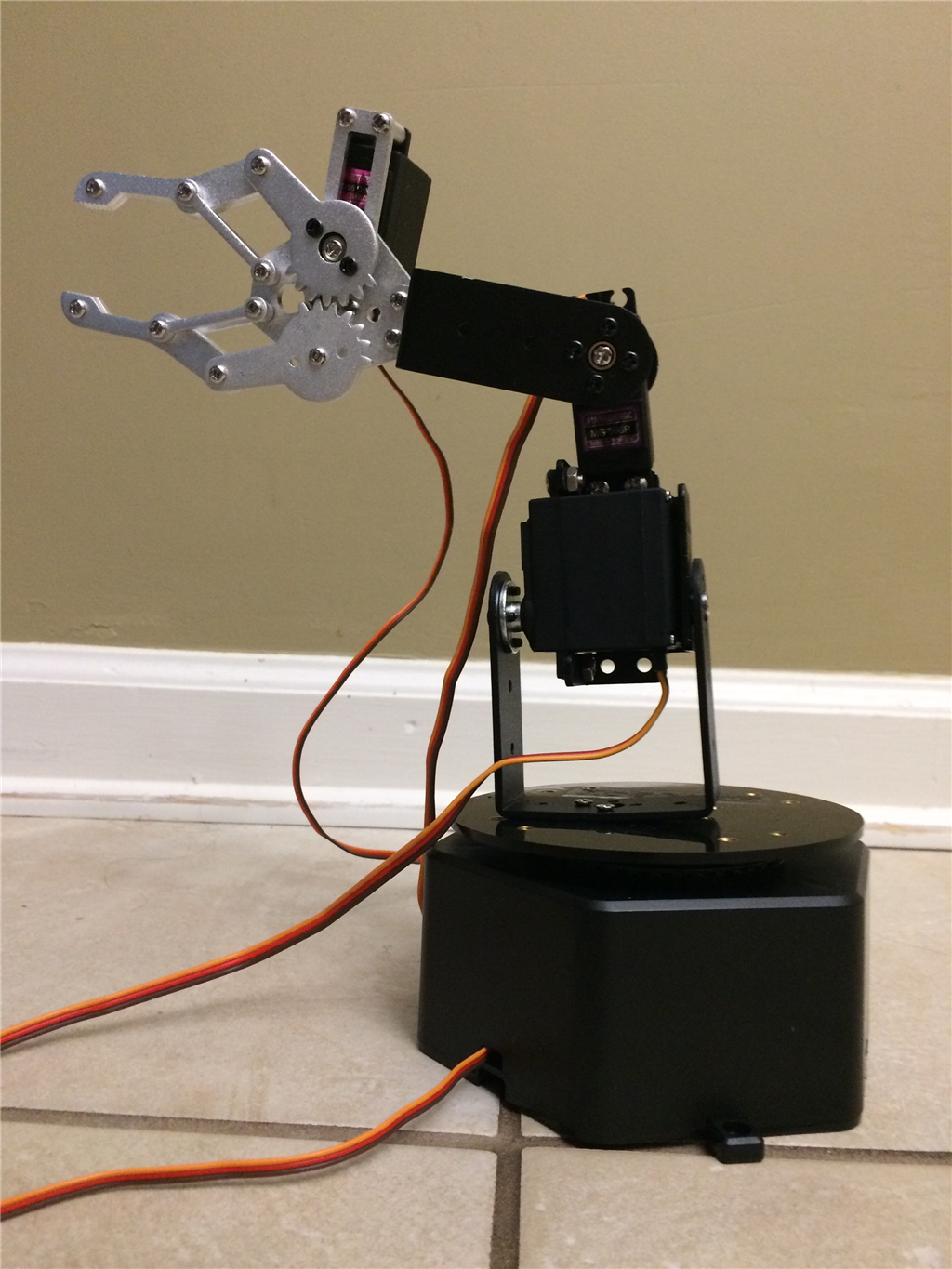
Ezang's My New Robot Arm On ARC
New robot arm in EZ-Builder with a gripping personality-demo video coming next week.

Rural's My Experiment 626
Scratch-built expandable robot platform for roaming guard, companion voice-controlled info, remote presence and...

I had that setup working nicely a few years ago before I switched over to the Sabertooth / Kangaroo combination. Have a read through my old thread where I got great help from a member and got it working. : synthiam.com/Community/Questions/2333
Remember, you will need to use a multi turn pot. Regular ones will only do one turn. If you go past it's limits it will break and if powered on it may catch fire.
Hope this helps.
Thanks Dave! I'm not Good in scripting... But I try hard! Lol I'll try it so, and please allow me to get your help in the process, can I? Once again, Thank you.
I'll be happy to help if I can. I'm sure there's many others here that will beat me to the proper answers when you ask.
David... another stupid question (if you don't mind..) how should I wire the Pot ? I just got one 5K multiturn as you teach me.. since I connect the signal to the midle, it does not matter the positive and negative ? thanks.
Ok! I figured out how to wire and read the ADC value. Now, i'm trying to write some script to control the position. I start with that one you pointed me (the other thread), but not having sucess... Once again, any help is highly appreciated!
thanks!
Please post the script your useing. Not the one I posted. I need to see the one you wrote. I'll see if I can see anything.
well.. this is what i've been trying... //////////////////// my intention is to have a script that I can call to position the Dome. for example, if I want it turn rigth, then I call the script "rigth"and it will turn thru that position, no matter where it is at the start point.. (exactly like we do with servo and animation command..) ////////////\\\\\\
The code you have seems to be running right. It keeps going to the Lookleft section. It seems like it's reading your ADC port as less than 125. What is it that is not working for you? Do you have a ADC monitor installed for the port you're attached to so you can actually see what the reading is so you can set your values in the script properly?
EDIT : It goes to less than 125 for me because I don't have a ezb reading an adc port attached to ARC. Also how are you sending your movement command and setting the variable? You can use a separate script to as a trigger to start a movement script waiting for a variable and movement command.