

Hi Friends!. well I'm finally ready to put my full size R2 to roll... But I need a tip from you. What kind of H-Bridge or controller do I need (or can I use) to use with my ez-b ? I believe that the regular one will not be able to power this Scooter motors that i'm using.. am I wrong ?!


By tevans
— Last update
Discover more robots
Autiboy's Max The Robot Based Off Of Inmoov
InMoov-based robot Max, fully 3D-printed and assembled; first 3D-printed robot with a FreeCAD-modified custom ear.
Morbeious's Alpha (Dev Servo Bot)
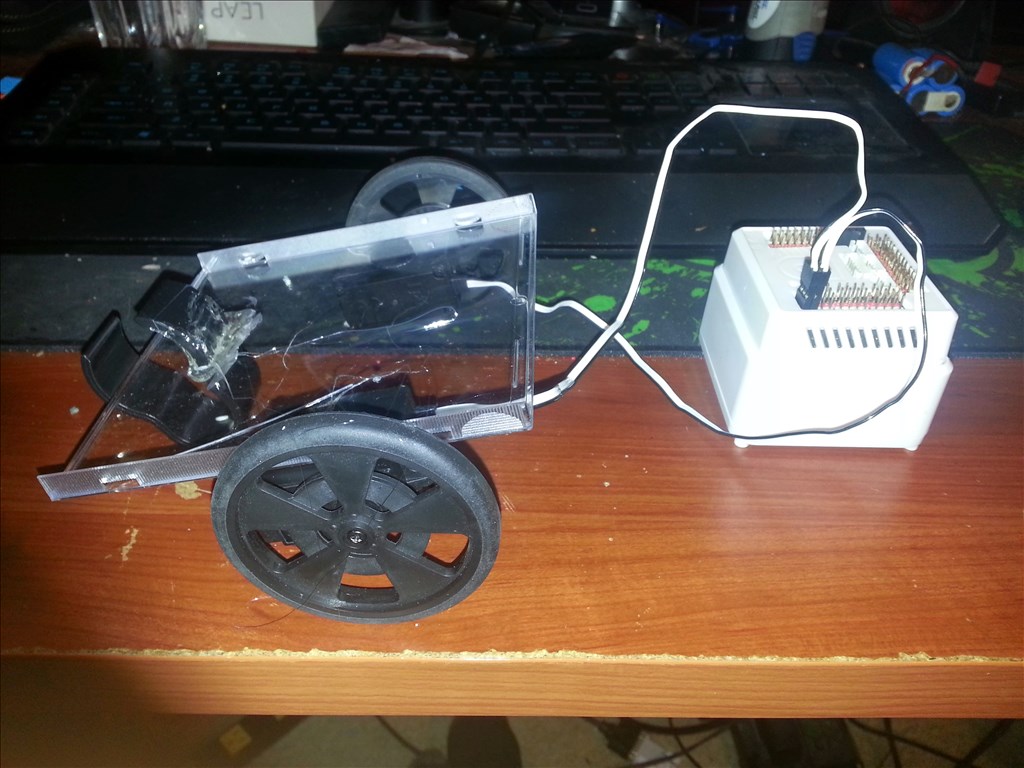
Dev Servo Bot using Ez-bit parts and recycled materials: CD-case caster, cable clip, hot-glued frame and sonar for...

Steve's Mini 6 Fabricated Robot
Mini Six EZ Robot with EZB3, micro servos and custom aluminum brackets - compact DIY build with Bluetooth speaker audio...

I understand the concept. But I'm not Shure if I know how to do it. Do you suggest any tutorial where I can start from ? Thanks.
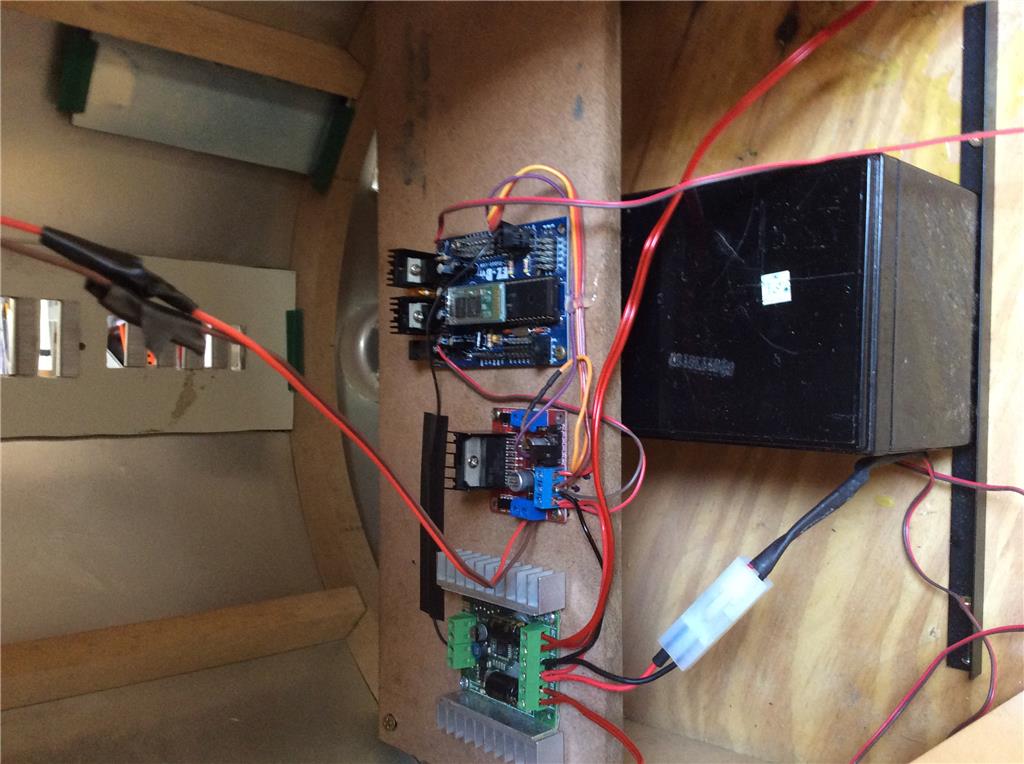
Since you're already familiar with the Sabertooth you can get a Kangaroo X2 daughter board and attach it to the Sabertooth at the control ports. This will add position and speed control to your DC motor. You will have to attach some kind of feedback device like a multi turn potentiometer or encoder to the pivot point of your dome. Either the center point of the dome where the motor shaft attaches or the shaft itself. This feedback device will tell the Kangaroo/Sabertooth where to stop and how fast to get there. You use simple serial commands to send that info from ARC just like you do the Sabertooth commands your sending now. Here's a couple pictures how I've mounted both a pot and an encoder to use with the Roo:
Here you can see I have two Sabertooth 2x32 with a Kangaroo x2 attached to each waiting to have the wiring completed.
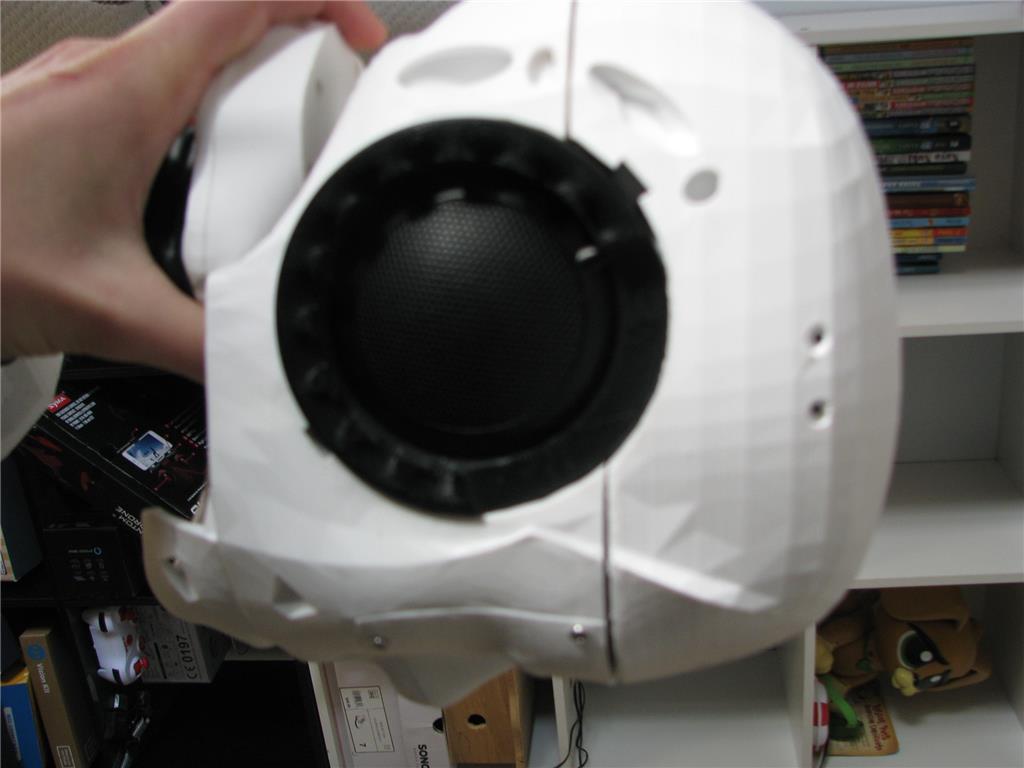
The motor is seen on the bottom, my pulleys are in the middle and the encoder is mounted on top to centered a shaft extension.
Here I have a single turn pot attached to the motor shaft
Here I have a multi turn pot (the little blue thing) running inline on a gear set next to the motor it's providing feedback for.
Hope this helps.
Thanks Dave! I just ordered a Kangaroo. As soon as I get it I'll try your solution. But.. Unfortunately, Since I live in Brazil, only God knows when I'll receive that...
Anyway, here is a video showing how far I get until now... Any suggestion of improvement will be very welcome.
https://youtu.be/Ck3SkrnCrRs
Thanks!
Hey, he looks great! Looks like he's fully working. How do you want to use the Kangaroo?
Actually , what I need is control the position of the dome.. At this point he is working via remote control, but I want it to be autonomous... Btw, I've been thinking, I use the sabertooth to move the legs, and a small controller to drive the dome motor. Will the kangaroo work with this second controller or I'll have to buy another sabertooth?...
Kangaroo only works with Sabertooth controllers.
You could still use a pot on the dome plugged into an ADC port, and sue some scripting for position control. Won't be as precise or possibly as quick to react as a "roo" but would achieve the same effect.
Alan
The kangaroo works only with the sabertooth (possibly the Syren too)... I still think an easier solution is to use a pot for position control... as you mentioned that's all you need....
Well, then the pot seems the perfect solution... since the domo move does not need to be as accurate as an jaw or arm for example... So I need to find an script that reads the pot value to determine the direction and how long the motor will run.. Am I right? Can you point me such script?