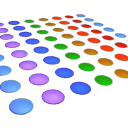

Hi there, my name is Tez, I have just completed EZ-Robotifying my G15 KS. Not a technical term but sounds good anyway. All the servos are now EZ and are controlled by the EZ-B v4 controller. The motors that allow the G15 KS to move around are now powered separately by a Sabertooth 2x12 which in turn is also controlled by the EZ-B v4 controller. A camera is present a shown in the images below. In addition to the camera is a Sharp HC-SR04 that is being used to help the ex-meccanoid now know as Jeeves to avoid objects. The meccabrain still remains within the frame as it may be useful later on in drone mode. I am awaiting my EZ grippers to replace the original plastic static hands. I also have a Revolution JD. Kitted out in a similar fashion to Jeeves (ex-meccanoid). Both robots are being used in conjunction with Emotiv EEG headsets. As my aim is to control them using just thought. I can get both robots to carry out actions by facial movements and eye blinking and winking. Pure thought is proving to be a bit difficult. If it was easy it probably wouldn't be worth while. I hope that the images below will show clearly what I have done so far. There is a long way to go yet.
This is Jeeves.
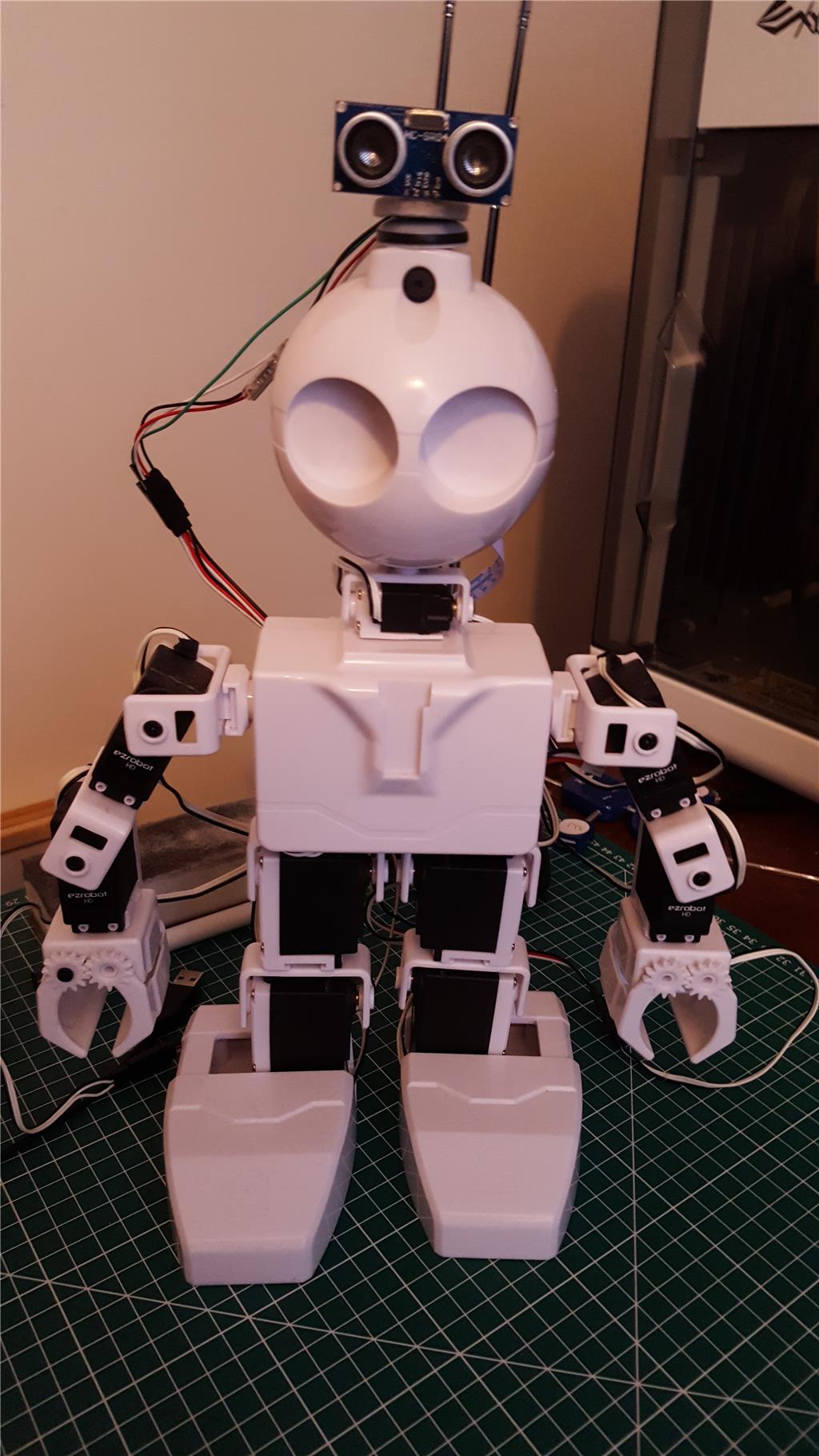
This close up shows my modifications to install a camera and distance sensor. I have also changed the arrangement of the neck and head servos to allow Jeeves to nod vertically for yes and horizontally for no.

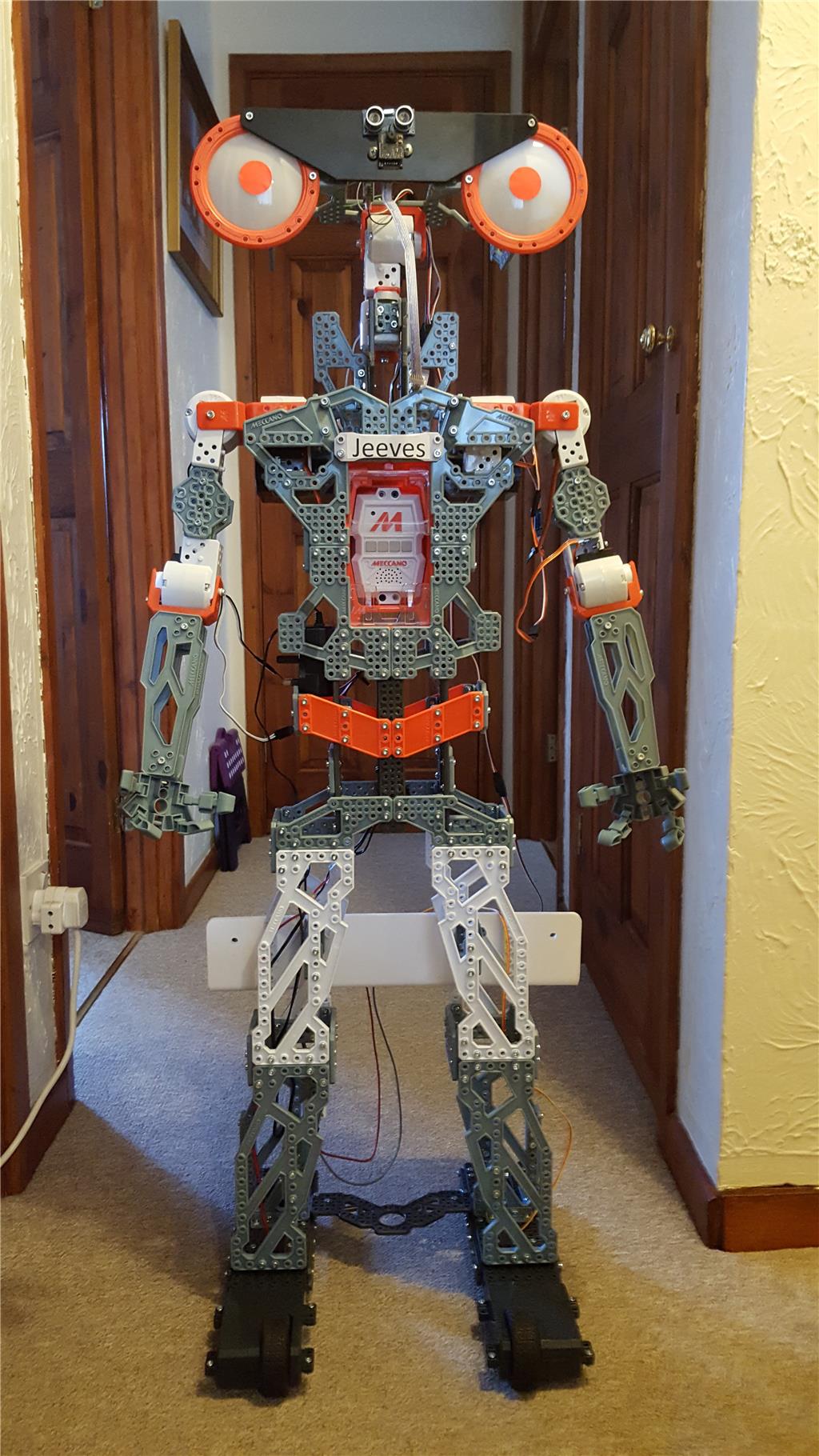
Here is a rear view showing the EZ controller and connections and the bracket holding the Meccano battery and the Sabertooth 2x12. The meccano battery means the motors have a separate power supply.
-635975794375180196.jpg)
A close up of the battery and Sabertooth 2x12.
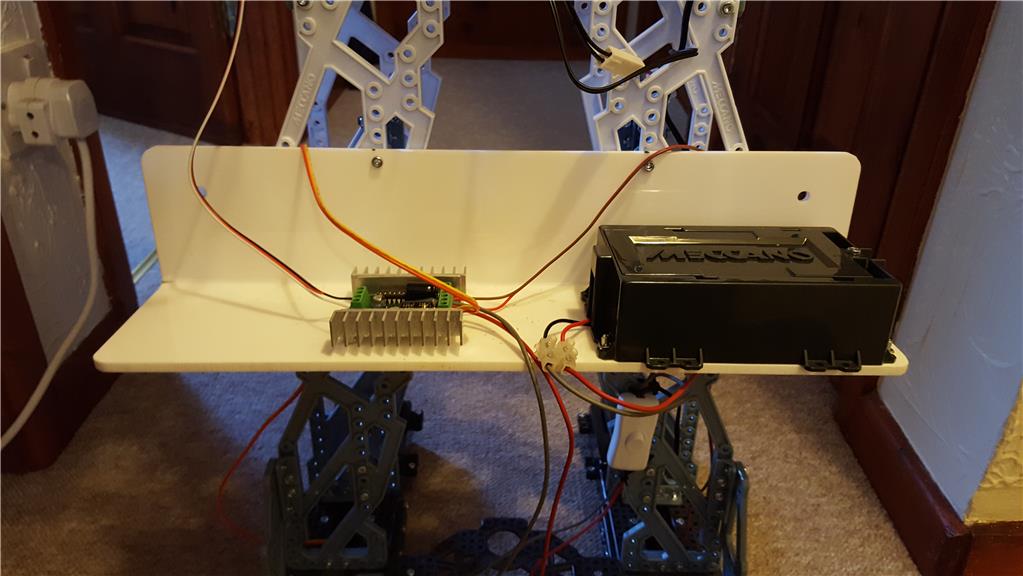
A close up of the EZ controller and head and neck servo arrangement.
I have also changed the rear wheel castors for for metal ball bearing castors. These give less resistance than the plastic ones from meccanno
Finally, the best little robot a programmer like myself could own. My Revolution JD.
This is the first time I have used the forum. I hope I have used your forum correctly.
Discover more robots

Ezang's My New Adventruebot Robot

Kenny's Humanoid #2


@westies
open the gripper then reposition the gripper.
Good afternoon, I have a problem with a meccanoid 2.0 xl, the Spanish language is not available, I want to know if the g15 ks software is compatible and if it has the Spanish language available ........ where can I download the software for the g15 ks? Thank you
hi i found this video.it has info where to choose and download your version
Instead of using an arduino as a bridge, couldn't the uart port on the mecanno Brian's circuit board be used to connect directly to the ezb? The port is not exposed on the case. You would have to cut a hole to get the wires through.
BTW -toys r us has the dev 6 servos on clearance for 4.99 ea.
@DJ Sures
Don't you think Tezsmith's Meccano robot looks a lot like ROBERTO from Futurama!? @tezsmith where did you say you got his brain from?
Just don't go so far as to make ROBERTO 2.0! Then we will have some trouble!
@Bumsteadsean curious what the benefit of talking to meccanoid brain from EZ-B to servos versus an arduino. Sounds like a lot of work and I don't know if there is enough documentation on the MeccaBrain to interface with it. You just need a pull down resistor and you can hang as many servos you want off a $5 arduino, there is an opensource library and there is lots of script examples for EZ-B with Arduino to Meccanoid servo's.
Good point.
@tezsmith Hi tezsmith, have not seen any up to date information on your Meccano Project.I want to take this time to say thank you for your tutorial and video which has help me very much with my Meccano Project. I noticed that the forearms and their servos in your pictures were mounted/connect differently than in your demo video, any reason? How did you mount/connect the sensor and camera to the black board? I was thinking of using BLU TACK. Can you provide a copy of the EZ-B script used in your demo video? Here are some changes I'm working on:
You help will be greatly appreciated, thank you.
I will provide my conversion process and a demo video when I have finished my first version.. Lets keep in touch, thanks again.