

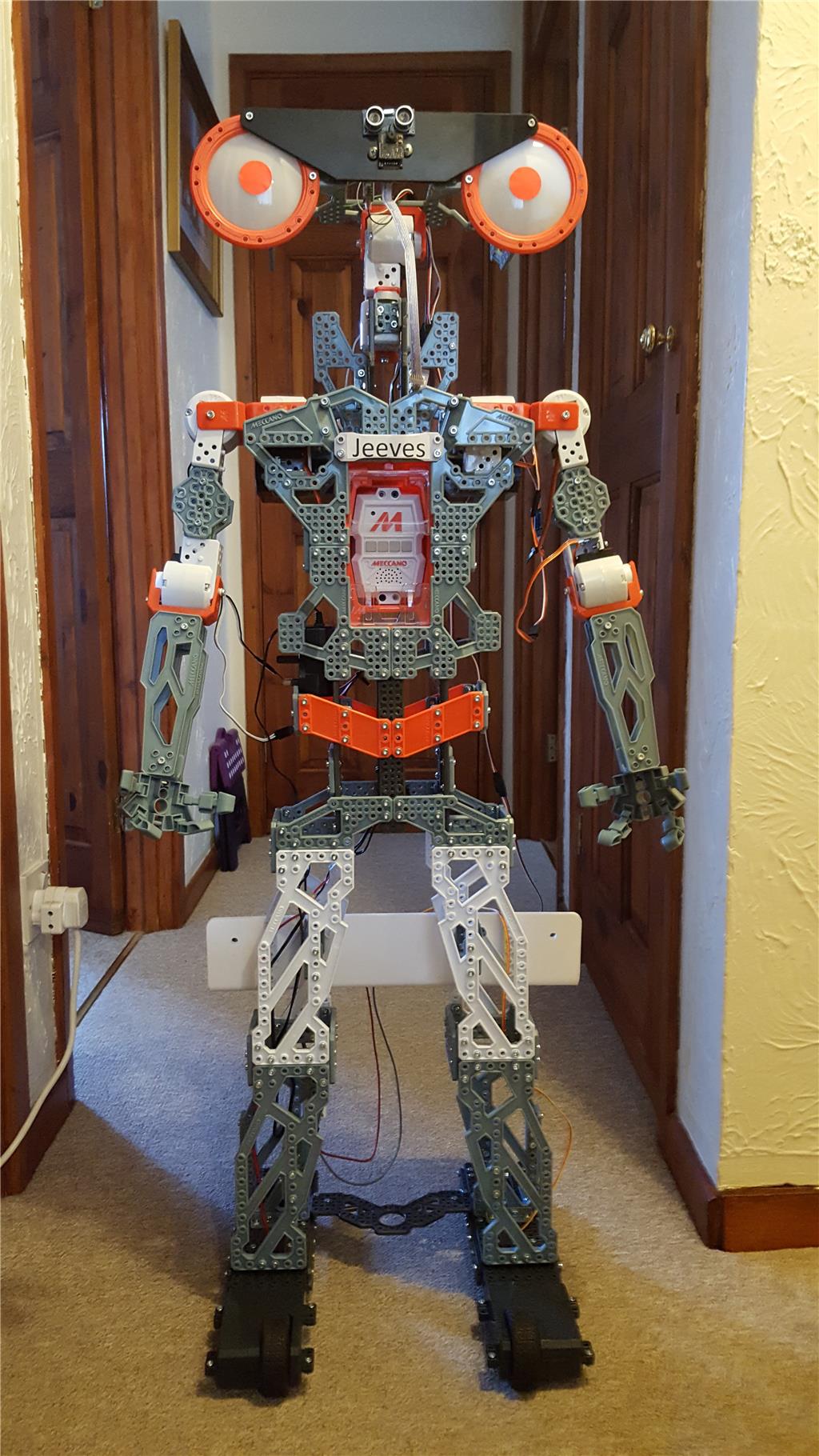
Hi there, my name is Tez, I have just completed EZ-Robotifying my G15 KS. Not a technical term but sounds good anyway. All the servos are now EZ and are controlled by the EZ-B v4 controller. The motors that allow the G15 KS to move around are now powered separately by a Sabertooth 2x12 which in turn is also controlled by the EZ-B v4 controller. A camera is present a shown in the images below. In addition to the camera is a Sharp HC-SR04 that is being used to help the ex-meccanoid now know as Jeeves to avoid objects. The meccabrain still remains within the frame as it may be useful later on in drone mode. I am awaiting my EZ grippers to replace the original plastic static hands. I also have a Revolution JD. Kitted out in a similar fashion to Jeeves (ex-meccanoid). Both robots are being used in conjunction with Emotiv EEG headsets. As my aim is to control them using just thought. I can get both robots to carry out actions by facial movements and eye blinking and winking. Pure thought is proving to be a bit difficult. If it was easy it probably wouldn't be worth while. I hope that the images below will show clearly what I have done so far. There is a long way to go yet.
This is Jeeves.
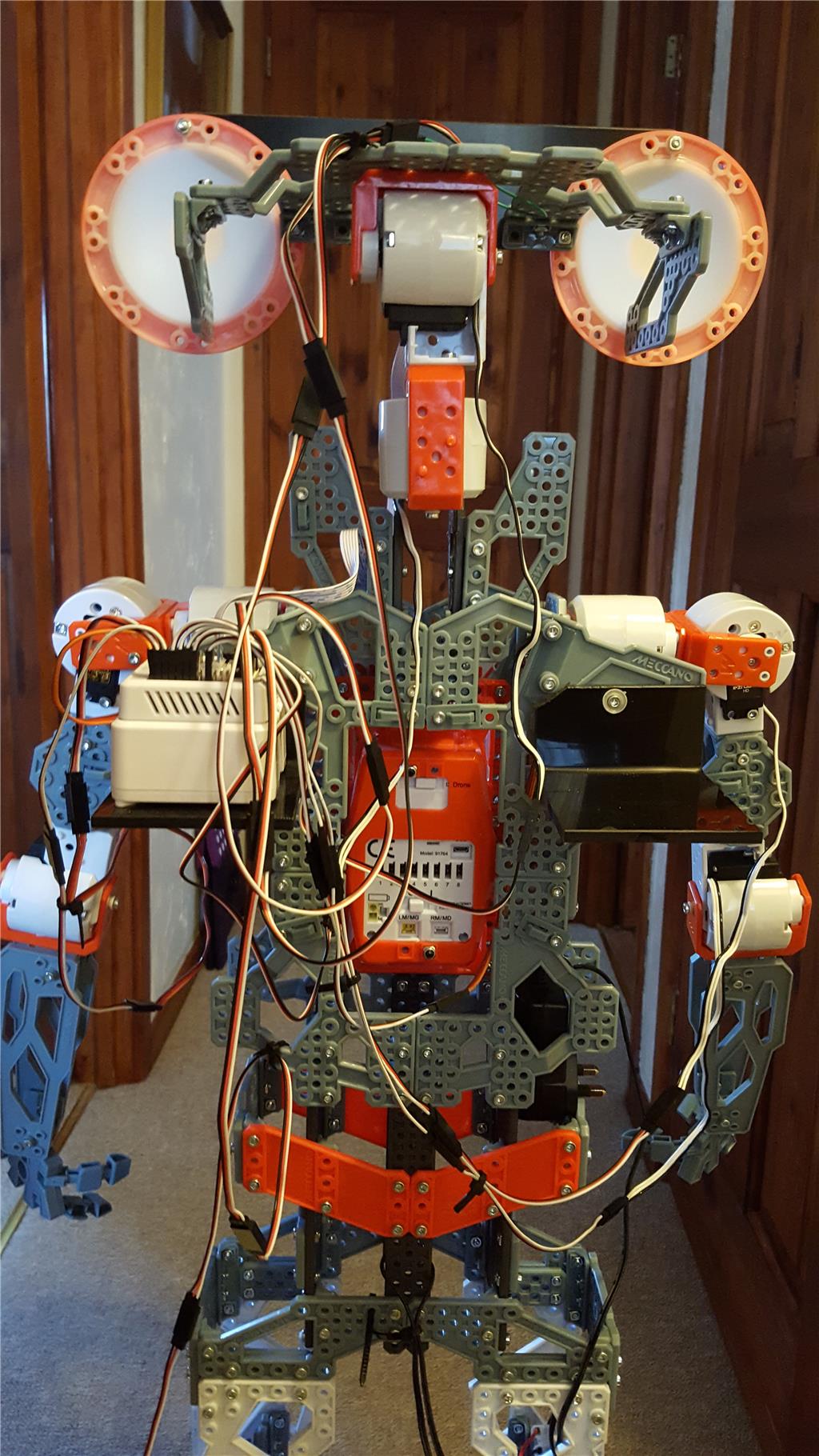
This close up shows my modifications to install a camera and distance sensor. I have also changed the arrangement of the neck and head servos to allow Jeeves to nod vertically for yes and horizontally for no.

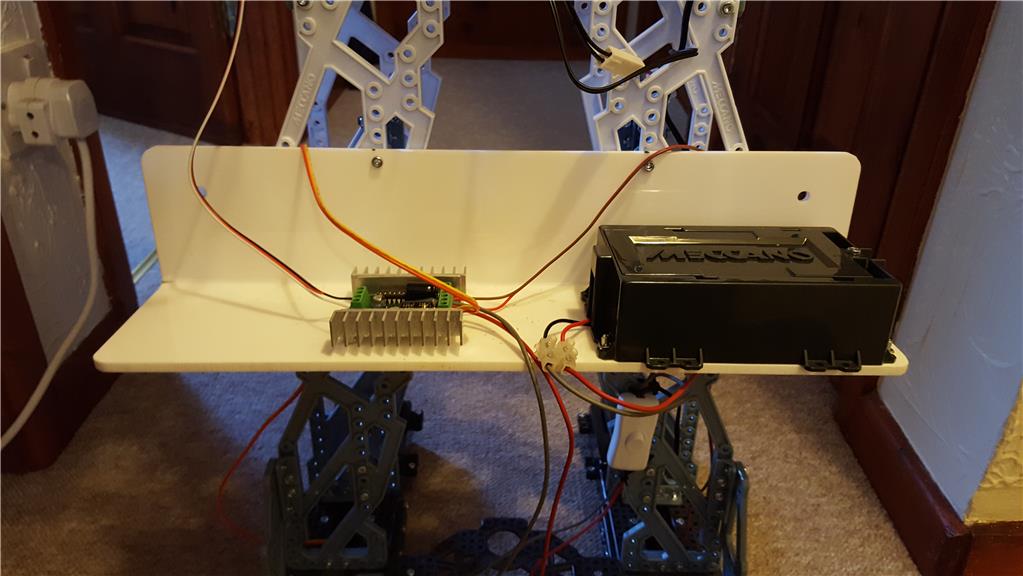
Here is a rear view showing the EZ controller and connections and the bracket holding the Meccano battery and the Sabertooth 2x12. The meccano battery means the motors have a separate power supply.
-635975794375180196.jpg)
A close up of the battery and Sabertooth 2x12.
A close up of the EZ controller and head and neck servo arrangement.
I have also changed the rear wheel castors for for metal ball bearing castors. These give less resistance than the plastic ones from meccanno
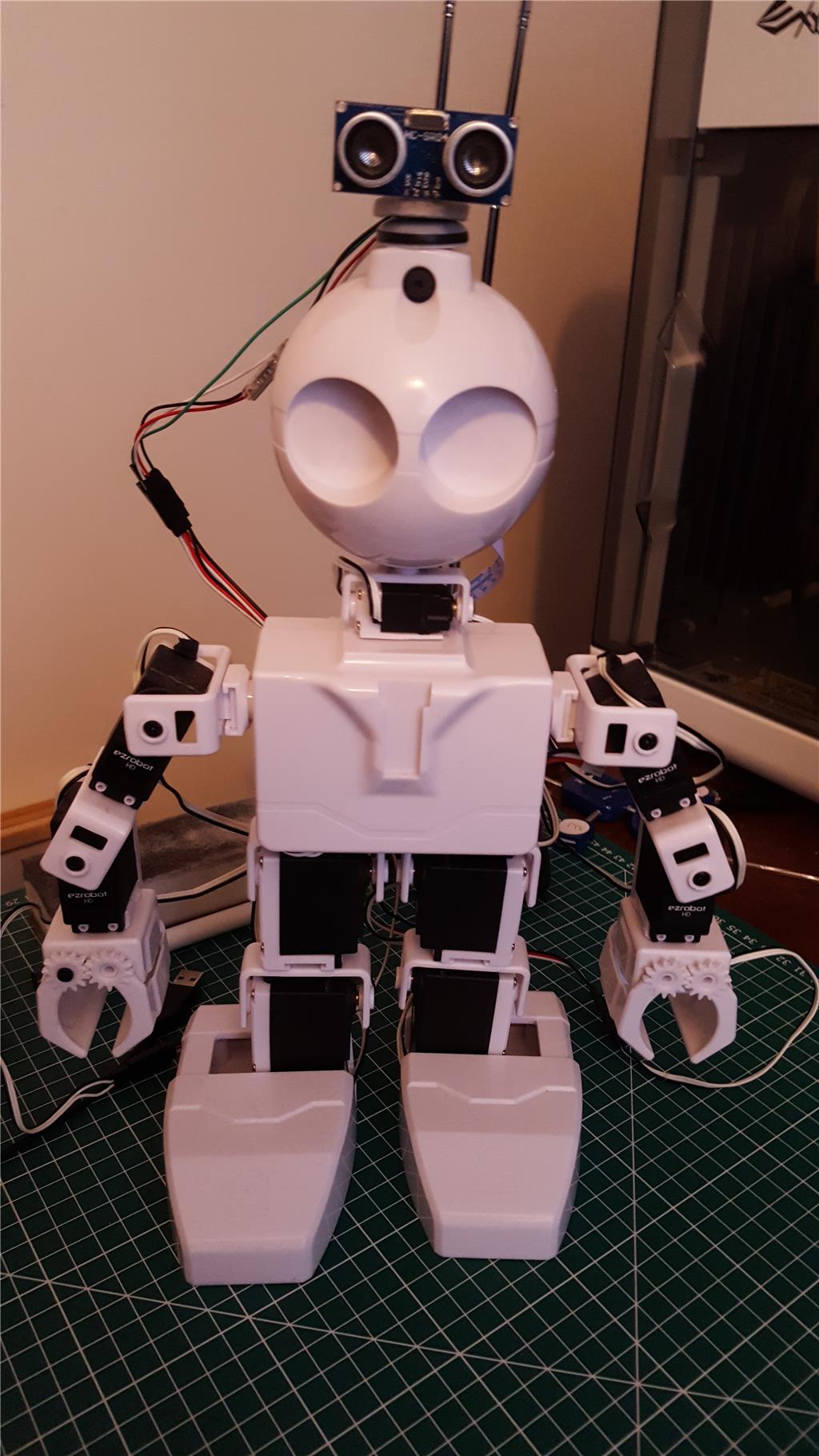
Finally, the best little robot a programmer like myself could own. My Revolution JD.
This is the first time I have used the forum. I hope I have used your forum correctly.
Discover more robots

Jstarne1's Meet Dusty , Modded Omnibot 4 Home Security Cam,...
-635396587467336392.jpg)
Robot's R3 Roomba Control Using 5 Volt Relays


In my eagerness to get my work onto the forum. I have noticed some typing errors in the first block of text. I apologise.
Oh this is great! We have seen a few people attempt the swap - but no one (to my knowledge) had done it yet. I believe someone had changed servos, but haven't seen an ezb connected. Also, the placement of the camera is great and fits very well in that location.
It's nice that the chassis has places to mount those shelves - as it really makes it easy to mount additional components on the back.
Really clean install - I'm impressed! Thank you for sharing.
It will be exciting to see a video one you've taught him a few ez-tricks!
Yes, I will make a video when I have taught him some tricks. Thanks for your comments and thanks to you and your team for giving us Revolution JD. I think mine is great.
Thanks for the kind words looking forward to seeing your meccanoid "ezrobotified"
looking forward to seeing your meccanoid "ezrobotified"
Hi Tez, fantastic job you've done. I've been modifying Meccanoid slowly for a little while now, and initially went the arduino route, but have been dissatisfied with the result, which led me to EZ-Robot and I'm very glad it did!
I'd love to see further details on your mod, and a video when you can! I'm assuming you replaced the servo's for more torque? My preference would be to use the standard servo's to allow selectable control via the EZB4 or the meccabrain, as my daughter still likes playing with him in LIM mode, but I'm more after autonomous behavior.
Hi Aceboss, I do plan to produce a video to demonstrate what my meccanoid can do when programmed using ARC. The reason for changing the servos is I wanted everything to be EZ. ARC in my opinion is a fantastic piece of software. The control and ease of use is brilliant. Quite soon I will produce an ordered list of all the steps I took to make my meccanoid completely EZ. I will get it out soon as I can. Thanks for your comments Aceboss
@tezsmith : fantastic,great mod-job! I like his evil eyes Hope to see your video soon...
Hope to see your video soon...
Sweet Taz. Nice work. Looking forward to the video. Your plan to use mind control is interesting. To my knowledge this hasn't worked yet and some even call it Voodoo and not possible. Hope you can prove them wrong. Good luck with bringing this concept out of the graveyard.