

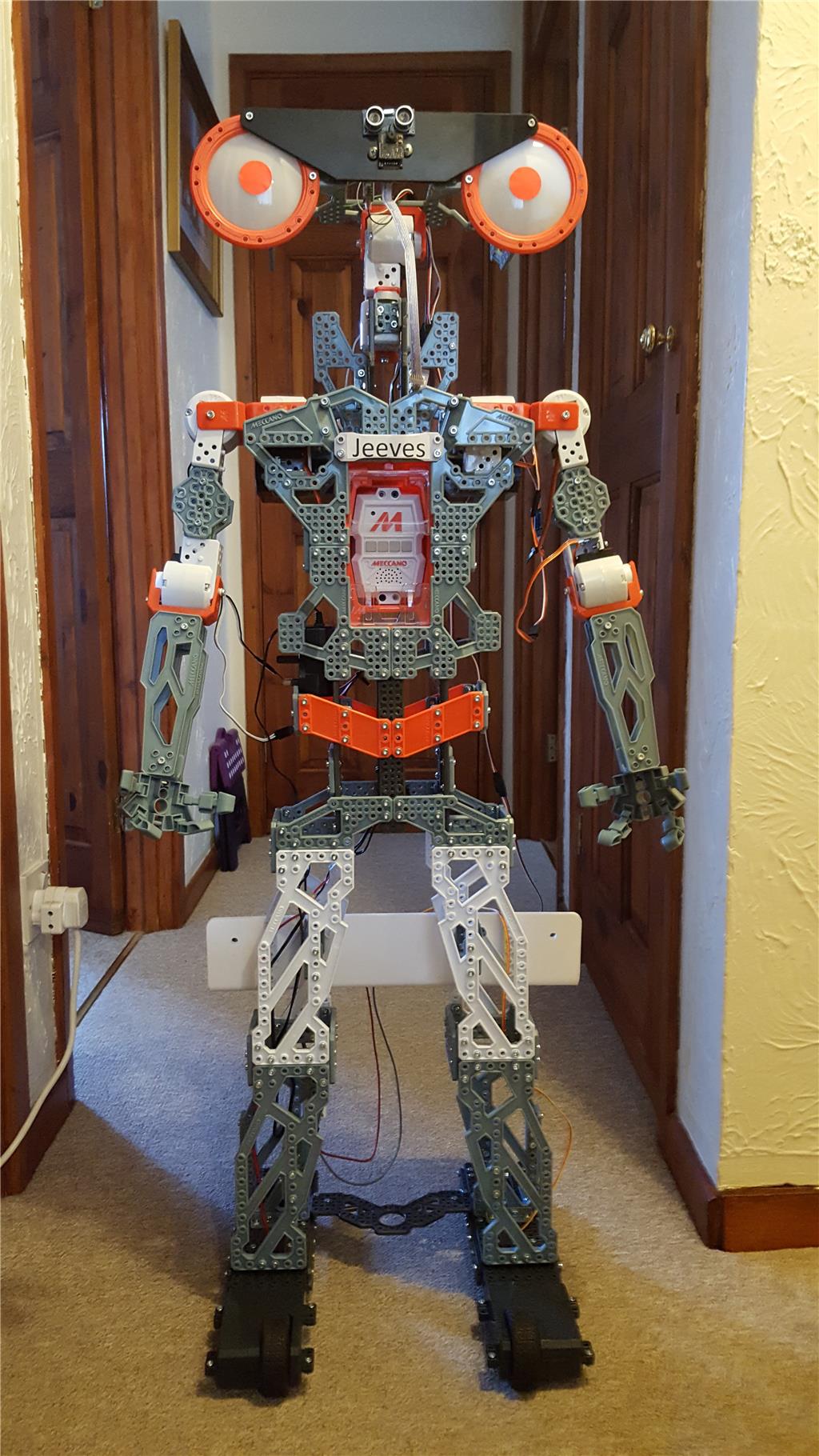
Hi there, my name is Tez, I have just completed EZ-Robotifying my G15 KS. Not a technical term but sounds good anyway. All the servos are now EZ and are controlled by the EZ-B v4 controller. The motors that allow the G15 KS to move around are now powered separately by a Sabertooth 2x12 which in turn is also controlled by the EZ-B v4 controller. A camera is present a shown in the images below. In addition to the camera is a Sharp HC-SR04 that is being used to help the ex-meccanoid now know as Jeeves to avoid objects. The meccabrain still remains within the frame as it may be useful later on in drone mode. I am awaiting my EZ grippers to replace the original plastic static hands. I also have a Revolution JD. Kitted out in a similar fashion to Jeeves (ex-meccanoid). Both robots are being used in conjunction with Emotiv EEG headsets. As my aim is to control them using just thought. I can get both robots to carry out actions by facial movements and eye blinking and winking. Pure thought is proving to be a bit difficult. If it was easy it probably wouldn't be worth while. I hope that the images below will show clearly what I have done so far. There is a long way to go yet.
This is Jeeves.
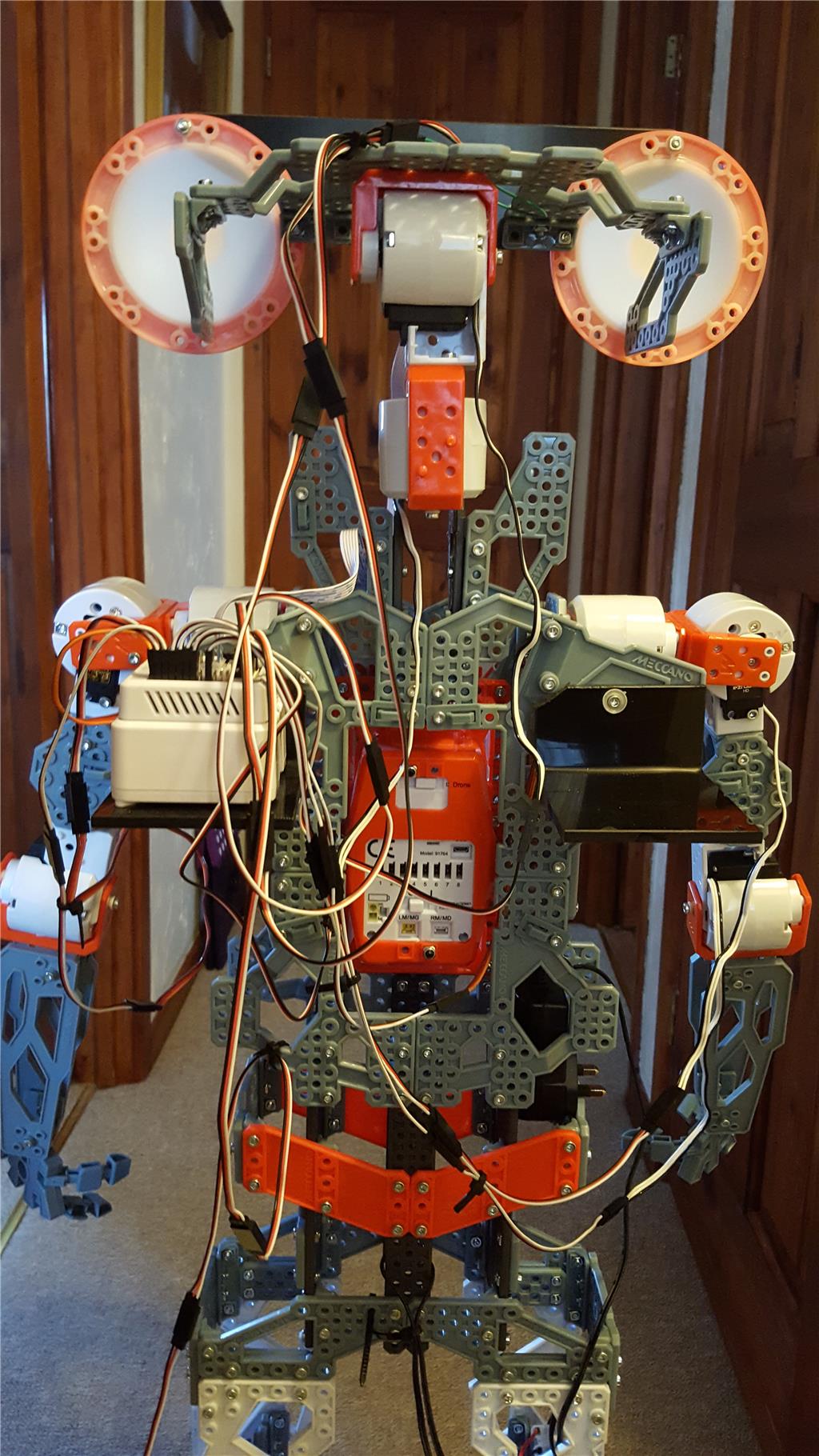
This close up shows my modifications to install a camera and distance sensor. I have also changed the arrangement of the neck and head servos to allow Jeeves to nod vertically for yes and horizontally for no.

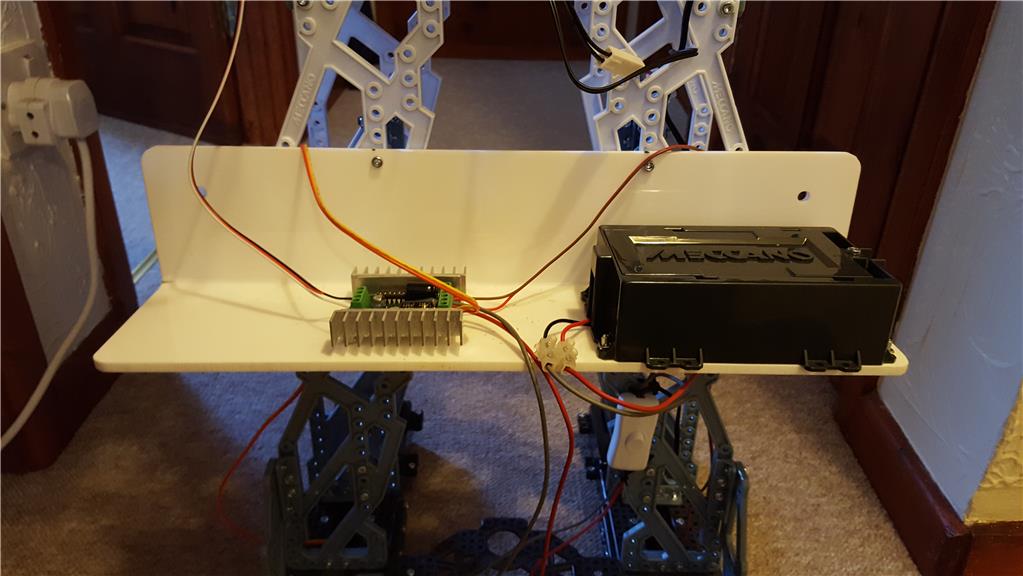
Here is a rear view showing the EZ controller and connections and the bracket holding the Meccano battery and the Sabertooth 2x12. The meccano battery means the motors have a separate power supply.
-635975794375180196.jpg)
A close up of the battery and Sabertooth 2x12.
A close up of the EZ controller and head and neck servo arrangement.
I have also changed the rear wheel castors for for metal ball bearing castors. These give less resistance than the plastic ones from meccanno
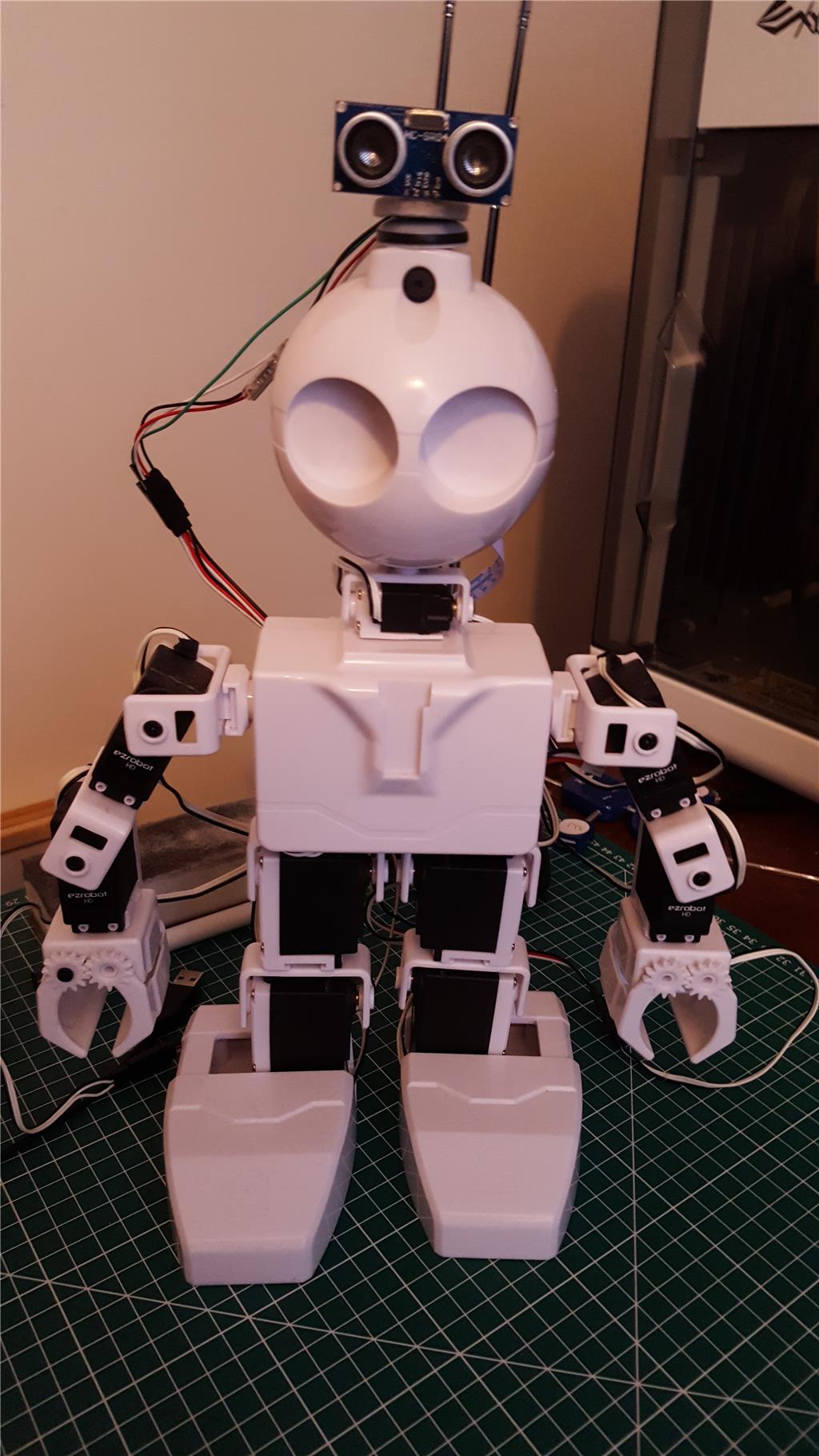
Finally, the best little robot a programmer like myself could own. My Revolution JD.
This is the first time I have used the forum. I hope I have used your forum correctly.
Discover more robots

Itsmeintorre's 3D Printed Adventurebot

Jstarne1's Meet Rc-Xd Airsoft Droid Dual Wield Gunner...


Meccanoid servos are 6v but they will not work with ezbv4. Most ordinary servo's will fit in place of meccano ones.
westies
i used the HDD ones from ez robot.
thanks
@tezsmith
hey any progress on your meccanoid tez? and idd slow down the motions is best,even with HDD servo. what i also did,is remove the plate from upper arm.it makes the arm chorter, but stronger.more surprizes later .is it ok that i use your topic for maccanoid?
Yes of course it is. I have not been able to be involved in the discussion. Bit to busy. Good luck with your meccanoid. The meccanoid makes a great platform.
great then this is THE meccanoid topic come together.
Yes let Meccanoiders swop ez ideas. I am rather poorly at moment but still trying to convert mine to the Ez platform. All ideas wellcome.
hi westies
what do you need to do then.
@ Nomad 6R Hi. I have converted one arm and trying to make a gripper but so far it works in reverse ie open when it should be closed. If I sort this out will convert other arm. Regards.