





























































































-635353562186322812.png)




















































































































































Hi all,
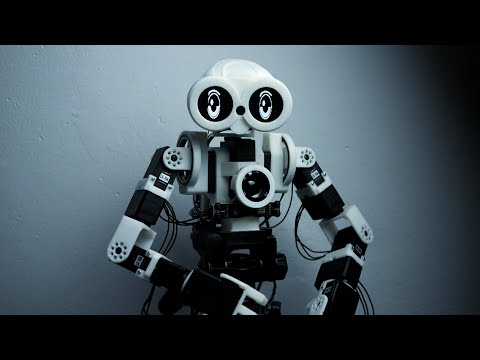
I'd like to share a video I just took of my full size Lost in Space B9 robot that's controlled by two EZ-B controller boards. Right now they are controlling limited movement and voice response of a few motors, lights and sound files played from a Sparkfun MP3 Trigger board. Although I'm just starting with the animation and have more building on the actual robot the result (mostly thanks to the EZ Robot controller board) is shocking. Please have a look at this (4 minute) You Tube vid and enjoy.
Please excuse some Technical camera lighting and sound issues. This is the first time I'd made and posted a vid online.
EDIT 8/2/13: Just realized I have no good pictures of how my B9 will look when complete. Here's one of the actual TV robots from the 60's TZ show Lost in Space and one recent shot of where I'm at with my build over 1 1/2 year after I started. Enjoy:



Thanks, Dave Schulpius
Discover more robots

Ericez's Smart Cute Trash Can
Mickey666maus's Oled Animated Eyes For ARC Pro And ARC Free


I had hair to worry about back in those days, so I was careful...LOL..
Are you going to jury rig another pot and see what happens? I still think the PID loop is part of the problem, which makes the dead band get to wide, which makes you loose the resolution you need, and make it hunt? If you slow way down, does it get better? Stop at closer/ the same number, from up or down? Repeatability, though the wrong value better?
I will shut up if you like..
Ron R
Insanity is to be shared
@Ron, PLEASE DON'T SHUT UP! Lol. No, I respect and want any and all feedback as long as it's constructive and your true view point.
Thanks for reminding me about the 2nd pot. It's a wonderful idea and tool to troubleshoot. If I can make it work I'll try it. One problem that may keep me from trying this is that each time I change anything on the system that the Kangaroo is controlling I need to re-tune. With my arm build that is a real pain in the butt and has always given me autotune settings that are unacceptable by making the motor jerky and hard to control. I have to say here that my arm build is the only type of rig that the roo hasn't been able to give a perfect tune to. All my other motors controlled and tuned by the roo operate great. When I finally get an autotune on my arm it takes me a full day of fiddling around with the settings to get the arm running smoothly again. tired
The green trace that shows the drive signal looks like you are in speed mode. It is switch 3 on the Kangaroo. In position mode your drive signal should look full on in either positive or negative or stopped. Or your gain is too low in you parameters.
@Purple, I have the dip switches set for Position mode. Interesting about the trace you mention. I'm not really picture what describing. I understand which trace your talking about but I don't understand the behavior. I have the Show "Command" box checked in the Live Test and not the "Speed" command box.
I did see better control when I increased the Position Gain. Maybe I need to fuddle around with that more and the other gains.
Hi Dave Last idea, for now, if you want to try it, based on Dave Cochran’s post.
What happens if you send a stop value 30 mv or so, outside the target value (and deadband), then drive home? It would mean two stops, one rough, one fine.
Like: If home is 2614 with a 15 deadband
Do something like goto 2644, stop , goto 2614 for forward or up from a low position goto 2584, stop , goto 2614 for reverse or down from a high position
( I might have the directions wrong but you get the idea )
This would kill some of the mass / inertia effect. What happens? Does it still over shoot? Repeats to a value? One way should be better than the other.
Ron R
@Ron, funny you should brainstorm this idea. I had a long 2 hour phone chat with a follow builder last night and he suggested something like this. I've actually had a couple people suggest to somehow slowdown the arm before it gets to canter. I seem to get better (but not exact) centering when it comes in slower. However I think instead of sending a stop command (or powerdown in Kangaroo's Simple Serial language), I may try asking for position feedback in a loop and when it gets to a point before I want it to stop send another position command with a slower speed command. I fear by sending a raw powerdown command and then resending a new position and speed command may give me a jerky stop and start condition. eek
My best case solution would be to get the Kangaroo's built in speed ramping working correctly. eyeroll
I think the position feedback, speed ramp is a good idea. I understand why you don't want to do a "powerdown" command", thinking how the "roo" works. I agree a position ramp should be better anyway.
If this doesn't work, I would think the factory should be able to help. They should be able to simulate what you have and tickle the settings to get you closer.
Let us know your test results.
Ron R
Brain is running again.... The lower speed should allow different PID and smaller deadband to equal more accurate stop?