
The project is moving forward! I tested the main features of the ez-b on my robot, and make a perfect marriage! This is just the beginning, the vision and speech, as well as other tricks are in future project. Very good, DJ Sures, I'm having a good time! Good job!

By Athena
— Last update
Discover more robots

Pittom's Rc Rock Crawler
Custom AXIAL XR10 rock-crawler with Novak M2 ESC, dual 55T motors, Acer PC, Foscam IP cam, sensors, speakers, onboard...
Tombrookyo!'S Another Wall-E But With A Few Different Bits
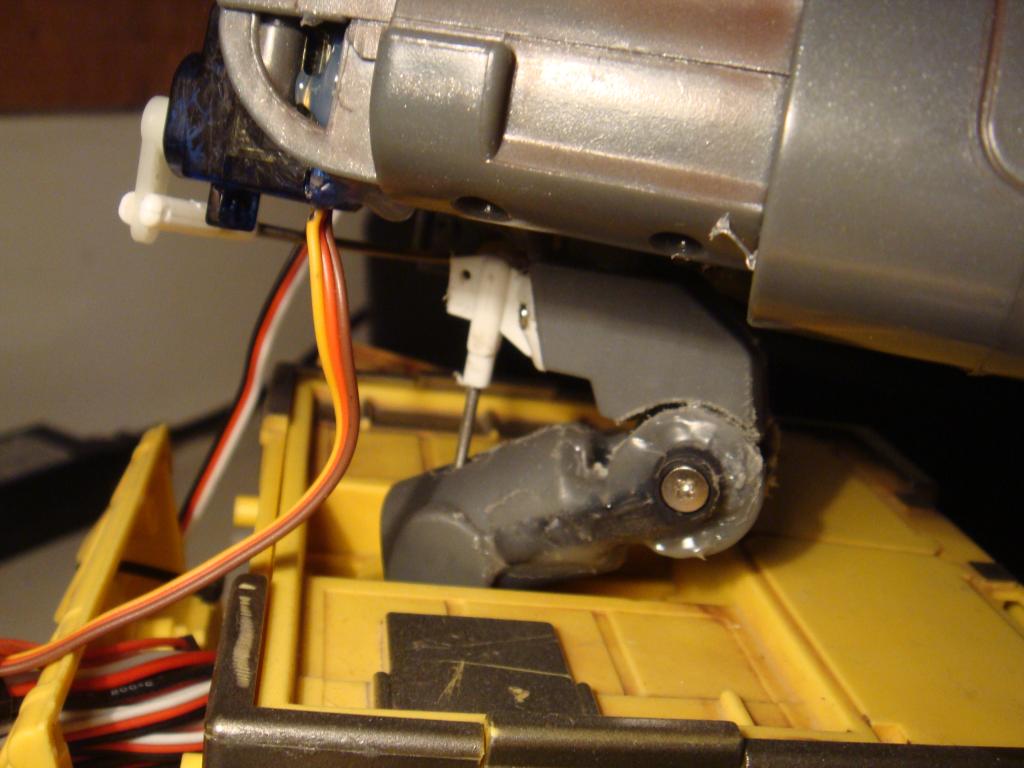
Wall-E style robot build with servo-driven expressive eyes, hinge neck using a pushrod and stock pivot, ezB on back, I2C...

Fxrtst's Mecha Morphix Robot Platform
Build and program the Mecha Morphix robot head ALAN with hours of 3D printing, assembly, wiring and coding tutorials...

good job
Looking pretty sharp. I love the LED mouth and the ping sensor eyes that can look up and down.
Most people seem to put the ping sensor near the floor instead of on the head. Does it have any problems with obstacles mounted that high?
Alan
I'm glad you like it actually has 2 ping sensors, one in the head and another at the base, the base did not detect objects such as chairs or tables, head crashed into them, and one in the head does not detect small obstacles like a book on the floor or a shoe, so this solved the difference in height of the obstacles, although the area of medium height, you need to move down the sensor head. A script to move up and down the sensor head while the robot moves forward, and good .
I put a ping sensor up higher, and i aim it down towards the ground. At around ~65 degrees, so it can see outward too. I find that works well to see a variety of heights.
You can also mount the sensor on two servos. And have it move all over with a script.
So you can run two ping radar controls?
I think you are the or one of the only people who has created their own custom robot design. And a brilliant design it is. Amazing job. Also, this thread was apparently by Moderator. Should that be changed?
Hello creativita, the project's original post is this:
synthiam.com/Community/Questions/10
I'm not an administrator, just a simple user, I guess you meant this, greetings!
Do you still have that EZ-B? DJ Sures has been looking for people who own those.