
Hello!
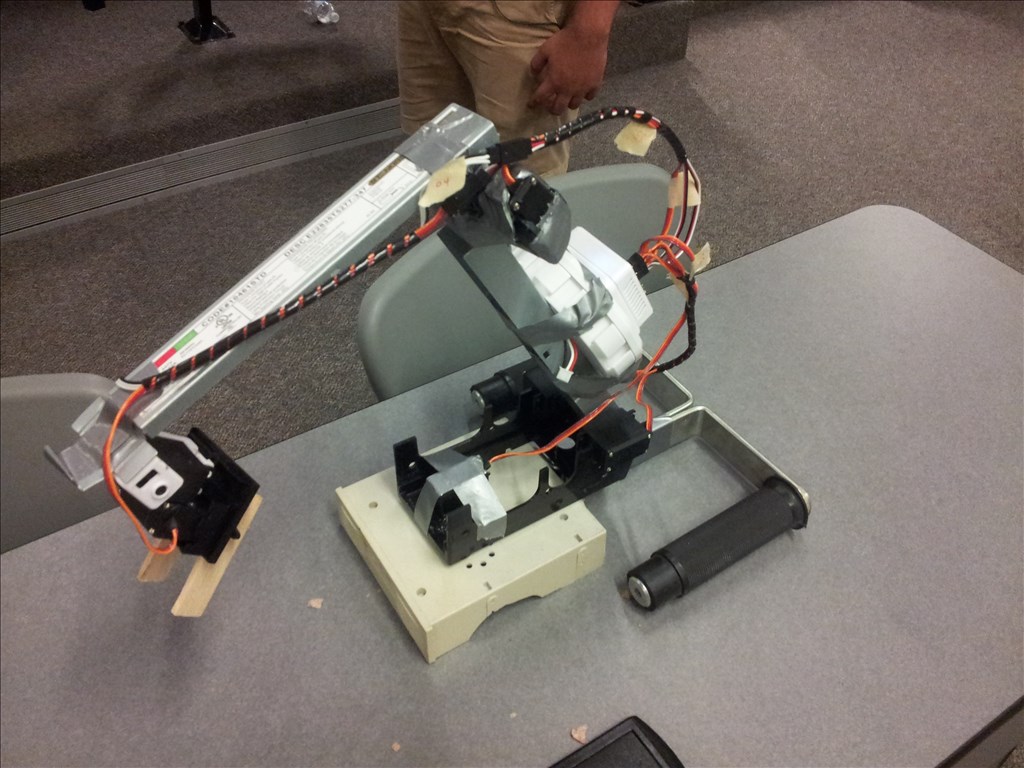
At this year's University of Waterloo Enghack hackathon, 3 of my friends and I created a motion controlled robotic arm using scrap metal, plastic, a myo, a wii remote, and ARC . In the span of 20 hours we created this!
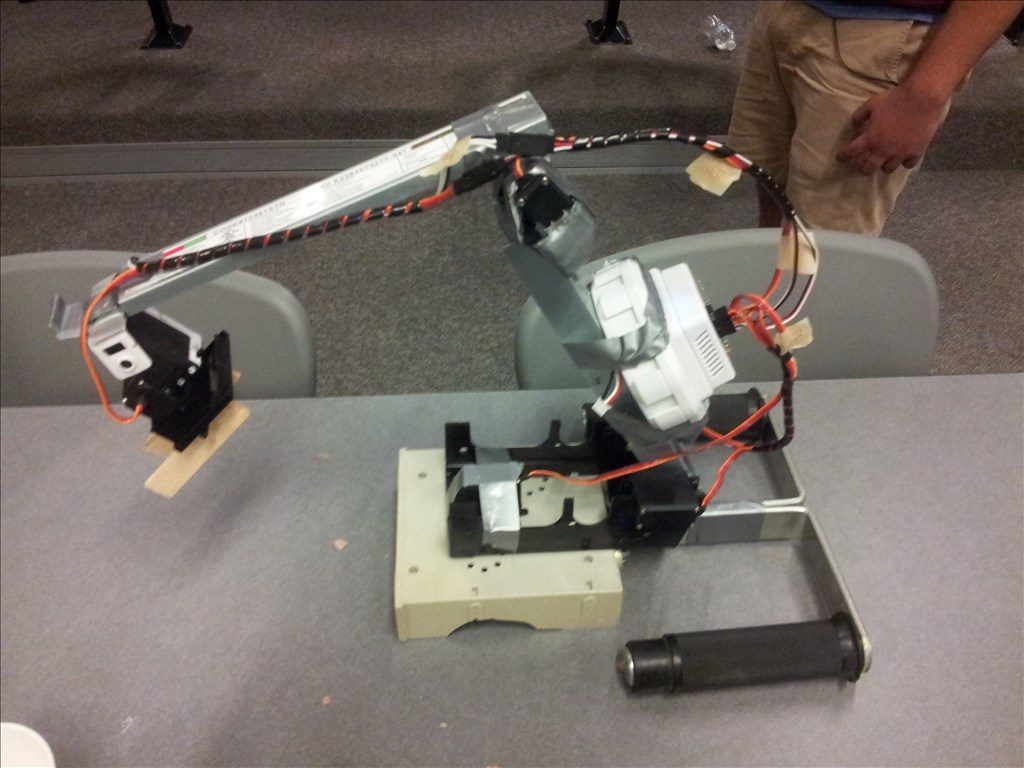
We got 3rd place and won this gift certificate!

I think I'm going to frame it
By Johnnybib
— Last update
Discover more robots
Ezang's Mymodifiedadventurebot
Modified Adventure Bot with ultrasonic radar, camera, RGB animator and custom back wheels
Steve's Rolling Bot Ez Robot Experiment
Build a rolling bot with EZ Robot EZB3 using coffee-lid wheels, continuous-rotation servos and LiPo-simple balance...
Jstarne1's Ladybug Lawn Mower 3D Designing The First 3D...
Ladybug-themed all-in-one mower and weed eater kit showcasing an integrated lawn mower and trimmer design.

Awesome James! Great to see your skills being put to good use
I see the servos were a little shaky - i would recommend using the ServoSpeed() command on the INIT script for those servos. Perhaps setting them to a value of 2 or 3 will cushion the shakiness.
When you coming back to work at ez-robot?
I set the servos to a speed of 0.75 to slow them down since the arm would go crazy if you moved too fast. Does the servospeed command even take a double (or floats) as a parameter?
I should be back by August 31st
@James.... You built that arm in 20hrs? Not bad, not bad at all.... Love the duct tape..... LOL. I use it all the time when I need quick assembly...
congrats
Hahaha This thing is held together by duct tape, hot glue, screws and a little bit solder...
But mostly duct tape