
Gang,
I'm working on creating a simple bot to play with that's designed around the Dev Kit Components with either 3d parts printed on your own, or by the community, any suggestions are appreciated.. The picture doesn't show the arms yet.. I also plan on adding the Camera and the Sonar..
Parts needed to print, Buy..
Qty Name 1 Hexapod Body 1 Extension Cube 2 Lever servo - 180 Degrees 2 Continuous Rotation Servo 1 Hexapod Foot (modified - Shorten)

By Morbeious
— Last update
Discover more robots

Rb550f's Ez Robot Attacknid 6Lr
Attacknid robot with EZB V3: 18-inch walker with 12V lithium, dual H-bridge drive, sound/LED mic, 12-inch LED fan, under...
Luis's Using The Sure Dc Ss503v100 With Ezb4 From Ez-Robots
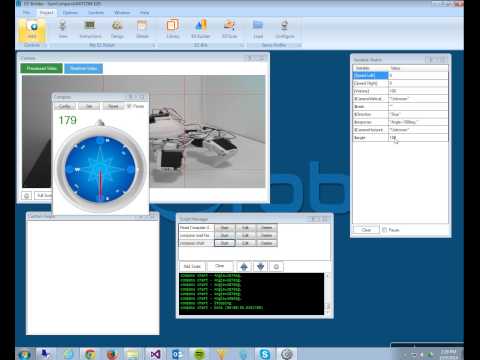
Connect Sure DC SS503V100 compass to EZ-Robots EZB4 via UART: RX/TX wiring, set OPT high to 3.3V, 4ft wire tested,...
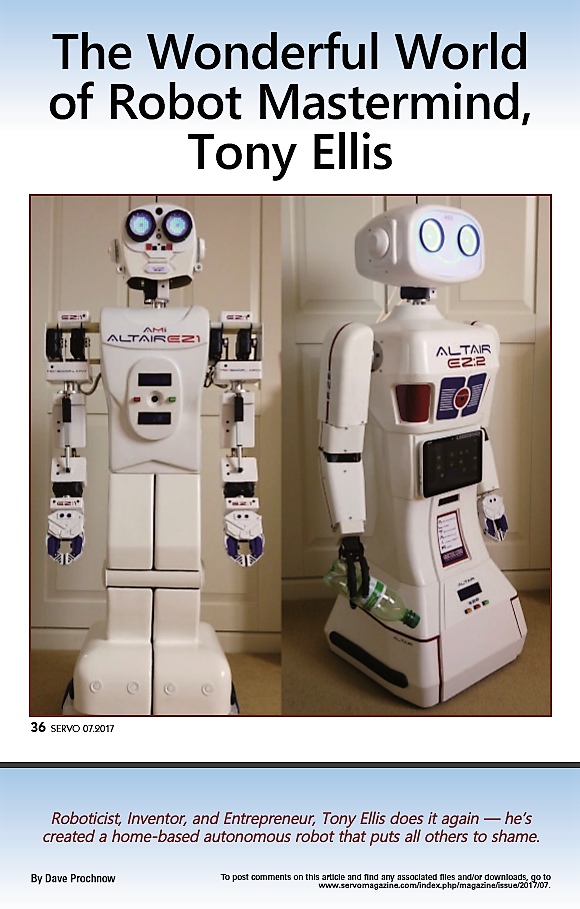
Toymaker's Altair Robots In Servo Magazine
ALTAIR robots featured on Servo magazine July cover; Dave Prochnow spotlights Tony's robotics work, 1979 programmable...

That's an awesome robot idea!
Ha, ha... awesome.... just need a castor wheel ez bit....
@Richard r I'm going to shorten/widened the hexapod foot and put a ballbearing in it. That should do the trick..
Two words... "Balance Bot"
There were examples of balance bots running on just 2 wheels back in the EZ-B V3 times, with the uprated power of the V4 it shouldn't be too difficult to detect the platform's angle and move the servos to keep it nice and level...
@rich yeah, I thought about that.. but I wanted to create a bot with just what was included in the Dev Kit, and only ez-bit parts.. If I modify more parts and reduce the 6 AA battery pack to a 7.4 lit pack it would be a lot easier to achieve a balance bot.. but maybe not for the average Dev Kit owner.. I trying to create somthing that anyone with the kit should be able to create with little or no modifications of ez-bit parts, etc.. But it is a good suggestion..
thanks..
My first box bot used plastic skids for the rear and rotation servos for the wheels, and it was a pretty good solution (I used 3M Command Hooks as the skids). I think your idea of a shortened Hexapod foot would work well.
Alan