
Hello Team,
Well I'm diving in on this project. So it's sink or swim. The discussion thread for Automatic Battery Charger Docking is still open for those who wish to keep brain storming on the topic.
We decided that it would be better to start a separate thread when someone started their build on this project as each one will probably be unique for each individual's home or tastes in design.
I know Fred is doing one Home Base Finding Design Using A Ir Beacon Idea
And I think Technopro is working on one at Ir Autonomous Home Base
So kick back, grab a cup of coffee and try not to fall asleep I decided to put down all my thoughts and plans on this subject and work through a scenario (tailored to my home) to help me understand just what will be involved in all this. There will be a bunch of scripting to accomplish this (Rich are you available to assist?) and lots more hardware issues I'm sure. I will en devour to post schematics and pictures as time permits.
I decided to put down all my thoughts and plans on this subject and work through a scenario (tailored to my home) to help me understand just what will be involved in all this. There will be a bunch of scripting to accomplish this (Rich are you available to assist?) and lots more hardware issues I'm sure. I will en devour to post schematics and pictures as time permits.
Please...please, everyone who dares to wade through all this project, let me know your thoughts and criticisms. Poke holes in my theories, help brainstorm, whatever. All comments are welcome.
Discover more robots

Ezang's My New And Improved Talk Servo

Ericez's My Lita Can Dance With Modified Jd Movement


Automatic Battery Charger Docking Project 2/27/13 by Rex Gordon
Example Scenario (continued)
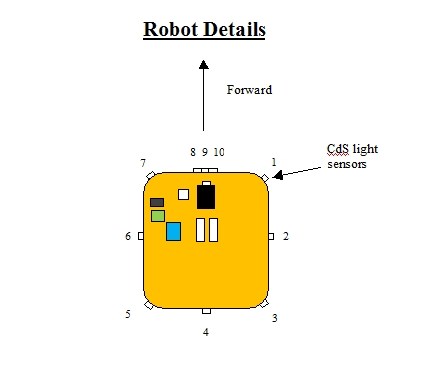
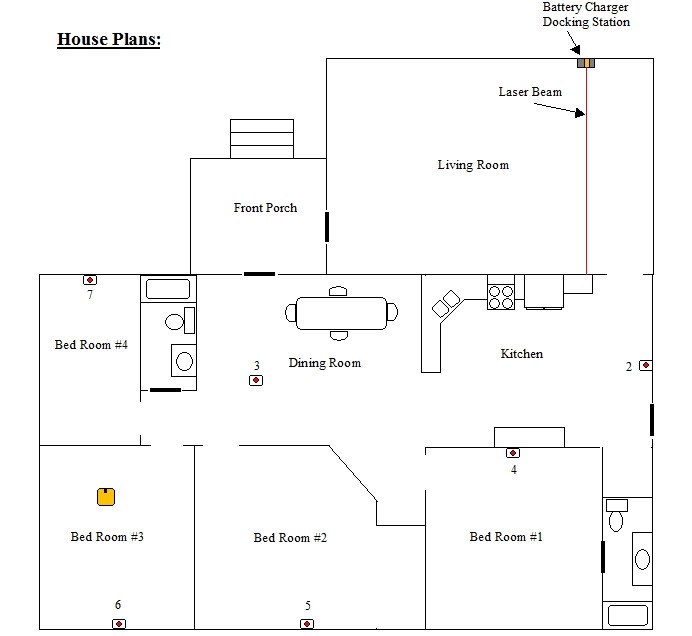
-For this example let's say that the laser is first detected on CdS light sensor # 2. -A stop command is sent to the Sabertooth drive motor controller. Halt all motion. -The robot needs to align the forward CdS sensor #9 with the laser beam. -A command is sent to the Sabertooth drive motor controller to rotate the robot very slowly to the right until the laser beam is detected on sensor #9. Note: The laser beam will also be detected on CdS sensor #1 & #10 as the robot rotates. -The laser beam is eventually detected on CdS sensor #9. -A stop command is sent to the Sabertooth drive motor controller. Halt all motion. -If the path is clear, then a forward at half speed command is sent to the Sabertooth drive motor controller. -If the robot's path drifts to far right or left and the laser beam strikes either CdS sensor #8 or #10, then the script commands the Sabertooth drive motor controller to make a very small course correction (Right or Left) until the laser beam is once again detected on CdS sensor #9. -If the path gets blocked, the script will have to handle the situation and then maneuver the robot to reacquire the laser beam and resume the docking procedure. -When the robot gets close enough that the camera recognizes the docking glyph, the script commands the Sabertooth drive motor controller to slow to minimum speed to reduce chances of damage to the BCDS or robot during docking. -Also when the glyph is detected, the script now ignores all collision sensors except the forward IR range sensor. This sensor plus the docking switches will ensure the robot stops at the correct spot.
Contact with charging dock:
-Docking switch on robot and on docking station actuate. -A stop command is sent to the Sabertooth drive motor controller. Halt all motion. -Turn off RF transmitter. -All IR room beacons, docking laser and glyph light turn off or go into power saving mode. -Power now flowing into batteries. -Script is now monitoring the phototransistor digital input.
Charge complete:
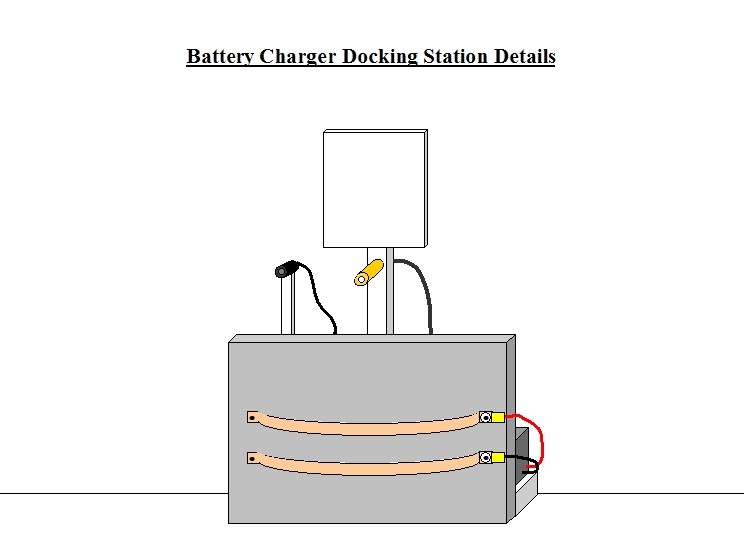
-There is a battery charger, externally mounted, high intensity, Charge Complete L.E.D. mounted on the BCDS that lines up with the phototransistor on the robot. When the charge complete L.E.D. comes on it triggers the phototransistor input to confirm that the charge is finished. The robot announces: "Charge complete. Exit docking station. Please stand clear." -A reverse at minimum speed command is sent to the Sabertooth drive motor controller for x seconds. -Docking switches open. -A turn command is sent to the Sabertooth drive motor controller. The robot turns left for x seconds. -Non-essential systems and collision sensors are turned back on or enabled. -The charging contacts on the robot and the BCDS are now disabled for safety reasons. -The robot resumes its normal activities.
yes i saw that ,he talking about room light not setting it off,sun light will set it off i guess you need to try it i have a laser diode made for lasers ,no light at all set it off ,i think is $2.42 i paid for it
so would i would do it check different types of lights
whats hard is to try different wavelengths of the spectrum and see if it sets it off,what you dont want is a false trigger to set it off
ONE of the main item i do is look at others who make a design and with testing i made the design alot better without any type of errors
thats one reason my job gives me sensors they design so i can redesign and make it better
on the thermopile sensor are you using the best one made TPA81 it has 8 thermopile sensors built in
Thanks Fred for the the thermopile info
Note: You may need to go back and read the previous page as I was entering it when you posted.
I know this is your post, your idea but you could try using floor map and putting marker on floormap for main room. Then use your sensor idea to guide it there.
That would be great if it is reliable enough. Do you know how to do this? I am new to scripting and know nothing yet about mapping. Thanks for the info. That's what I want....ideas....ideas....ideas
To anyone and everyone reading this post feel free to make any comments or criticisms about any of this stuff. I still have a lot to learn and if someone can save me time and effort I would greatly appreciate it.
Rex
My design is the same,you make a map and add your furniture,and items in your house,and plan a path using only sensors on your robot,same with home base you also add that to the map this was no other beacon or gyphs or anything else is needed to guide the robot to the home base
i can find the the map info,it is hard to add scripts but can be done ,i do see EZB does have a map feature
They call it path planning
Automatic Battery Charger Docking Project 2/27/13 by Rex Gordon
Questions (Keep check on this page as I will be adding more questions to it and /or including the answers that I find.)
-Does a compass module just have N, S, E, W or can it also do NE, NW, SE, SW?
-How far away can the camera detect a 4" x 4" glyph?
-What is the best method for using docking switches?