
Hello Team,
Well I'm diving in on this project. So it's sink or swim. The discussion thread for Automatic Battery Charger Docking is still open for those who wish to keep brain storming on the topic.
We decided that it would be better to start a separate thread when someone started their build on this project as each one will probably be unique for each individual's home or tastes in design.
I know Fred is doing one Home Base Finding Design Using A Ir Beacon Idea
And I think Technopro is working on one at Ir Autonomous Home Base
So kick back, grab a cup of coffee and try not to fall asleep I decided to put down all my thoughts and plans on this subject and work through a scenario (tailored to my home) to help me understand just what will be involved in all this. There will be a bunch of scripting to accomplish this (Rich are you available to assist?) and lots more hardware issues I'm sure. I will en devour to post schematics and pictures as time permits.
I decided to put down all my thoughts and plans on this subject and work through a scenario (tailored to my home) to help me understand just what will be involved in all this. There will be a bunch of scripting to accomplish this (Rich are you available to assist?) and lots more hardware issues I'm sure. I will en devour to post schematics and pictures as time permits.
Please...please, everyone who dares to wade through all this project, let me know your thoughts and criticisms. Poke holes in my theories, help brainstorm, whatever. All comments are welcome.
Discover more robots
Doombot's Dirgebot V1

Nomad's Adventurebot Cherry

I'm always available to assist, brainstorm, pick holes etc.
looking forward to this, it should be an interesting challenge.
Good idea to start another thread,but the last one has some very good idea's that might be forgotten.
On my idea looking at a cheaper way to use the pololu beacon idea,same design only not using the CPU ,but using EZB instead. from the costs of 4 receivers and 6 IR diodes it looks about $10
Using the EZB connections ,looking at 2 ways to use the digital I/O ,one is called multiplexing and other i might use is I2C to digital ,both chips under $1
I ordered the parts i needed ,plus a round pcb from radio shack
This week need to get some scope testing and data from pololu IR beacon
So total cost is about $15
I think Rex means this topic is one for his attempt, not a new one for the whole discussion.
The other topic wont get forgotten and I'm (slowly) collating everything that we have come up with so far too so I will pick up all of the ideas.
The original topic is still the place to generally discuss the various ideas, plans, thoughts, suggestions etc.
Proposed Setup
Each room in the house will have its own IR beacon with a unique blink pattern. All IR room beacons will be made using parts from www.rentron.com and will have a low power standby mode to conserve energy while not in use. The IR beacons will be mounted either on a wall or placed on a shelf at a particular height that makes it easy to be seen by the robot's IR receiver. It should be an unobstructed view. The beacons should be constructed so that they are omni directional. Each IR beacon will have a RF receiver that will activate the beacon via a signal from a RF transmitter that is mounted on the robot.
All RF transmitters and receivers will also be from rentron.com. Each RF transmitter will have a unique address code. RF receivers all will have a matching address code so one transmitter controls them all. The RF transmitter will be installed on the robot and will be activated by a digital output from the EZ-B. The RF transmitter on the robot will have its own separate battery supply to keep from using up main battery power while in hunger mode.
On board the robot will be an "omni-cone" reflector that allows the IR detector sensor to see an IR signal from any direction.
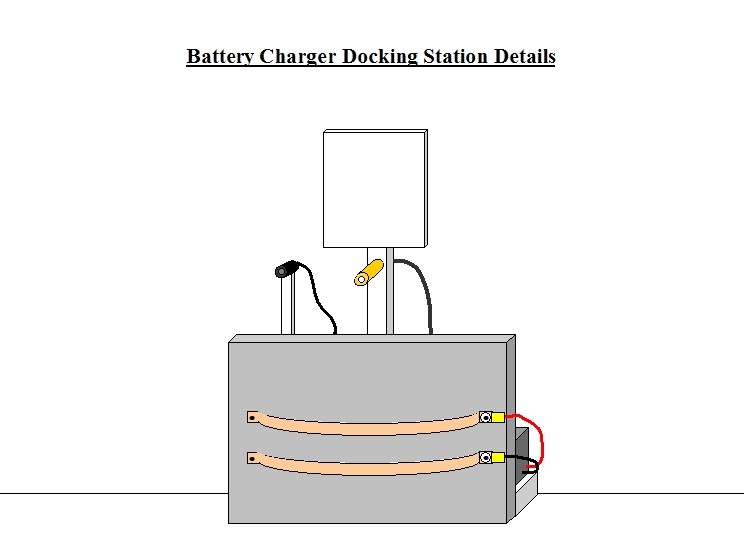
The Battery Charger Docking Station (BCDS) will be located in the Living Room (LR). It will also have a RF receiver with an address that matches the RF transmitter on the robot. When the robot RF transmitter becomes active the receiver on the BCDS and will turn on a laser pointer and a light that will illuminate a glyph symbol mounted on the BCDS. The laser and glyph will be used for guiding the robot into the BCDS. The laser is stationary.
The robot will have a typical array of sensors used for collision avoidance including; IR distance sensors, ping radar, and Ultrasonic Distance Sensors.
There will be a thermopile sensor mounted on the robot that will be used to sense whether an object is living or inanimate. It senses body temperature.
There will be a PIR sensor mounted on the robot to detect motion.
CdS light sensors will be mounted around the perimeter of the robot's mid deck. These sensors will detect the laser beam that shines out from the BCDS. Whenever the laser strikes one of these sensors the robot will stop, then rotate until the laser is shining on the front middle sensor.
IR beacons from www.pololu.com will be used to make it so the robot will follow me around.
Contacts on the BCDS and the robot will be disabled (i.e. not live) until the robot is fully docked for safety reasons.
Automatic Battery Charger Docking Project 2/27/13 by Rex Gordon
Example Scenario
-The robot is going about its normal activities. -Battery level monitor analog input indicates that the main batteries are low. -A stop command is sent to the Sabertooth 2x12 drive motor controller. Halt all motion. -The robot makes an announcement: "Hunger mode active. Seeking battery charger". -A digital output shuts down all non-essential devices such as: L.E.D. displays, eye
lights, voice lights,etc. If possible. -A digital output activates a RF transmitter located on-board the robot. This transmitter has a 300-ft.range and sends out a signal that activates all IR room beacon receivers and the Battery Charger Docking Station (BCDS) receiver. All receivers have the same address code as the transmitter. So the one transmitter rules them all.
-The IR beacons begin their unique blink patterns:
-In the Living Room the BCDS laser pointer is now on and the docking glyph is
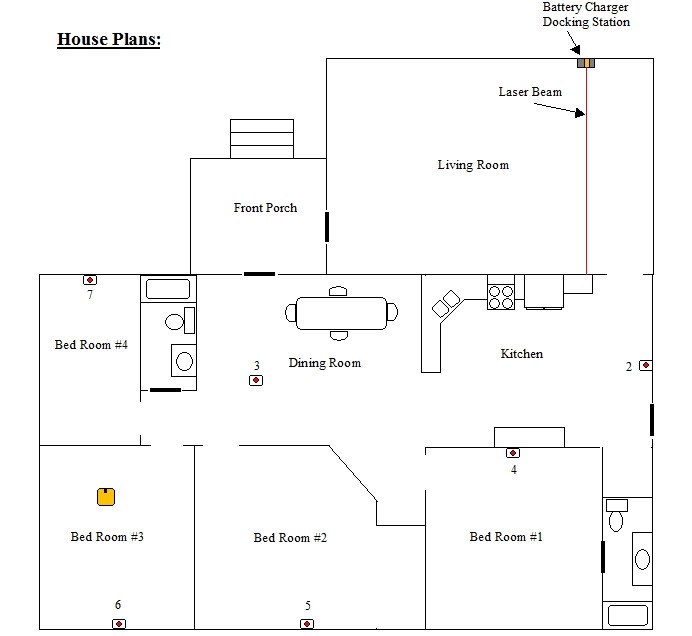
illuminated. -Script checks for IR signal blink pattern. -The omni-cone IR receiver digital input detects a repeating blink pattern of 6 blinks then a 5-sec. pause. --Within the script.whenever each IR blink is detected a counter is incremented and a 3sec.wait period (timer) starts. Each time a blink is detected, the timer gets reset to zero and starts over. However, when the beacon gets to the last blink in its pattern, there is a 5-sec pause. This 5-sec pause allows the timer to finish and "time out". When the timer finishes, the script compares the number of blinks stored in the counter to the blink pattern database listed above. The robot has confirmed that it is in Bedroom No. 3 (6 blinks= BR No.3).
-Based on information in the script about the location of the BCDS plus the current compass heading, the robot makes a decision on what direction to take. -A turn command is sent to the Sabertooth drive motor controller. The robot turns and tries to go east (because the script tells it that if you are in BR #3 the only way out is to go east). The script counter is reset to zero.
New directive:
-The robot is now searching for beacon #3. The script ignores all other blink patterns except for beacon #3. It uses wall following techniques and compass heading to find and work its way through the doorway. -After emerging from BR#3 the IR detector starts to see a new blink pattern. -A stop command is sent to the Sabertooth drive motor controller. Halt all motion. -The robot counts three blinks and confirms it is in the Dining Room (DR). -Based on information in the script about the location of the BCDS plus the current compass heading, the robot makes a decision on what direction to take. -A turn command is sent to the Sabertooth drive motor controller. The robot turns and tries to go south (because the script tells it that if you are in the DR the way to the BCDS is south). The script counter is reset to zero.
New directive: -The robot is now searching for beacon #2. The script ignores all other blink patterns except for beacon #2. It uses wall following techniques and compass heading to find and work its way through the next doorway.
Automatic Battery Charger Docking Project 2/27/13 by Rex Gordon
Example Scenario (continued)
New priority:
-* The Ping radar sensor and forward IR sensor detects an object blocking the path! -A stop command is sent to the Sabertooth drive motor controller. Halt all motion.
Examine object:
-The thermopile sensor input detects the presence of a warm object. (if object temperature is above x degrees then it could either be a pet or a human). The robot makes an announcement: "Excuse me. I need to find my charging dock. May I proceed?" -Wait for proper verbal response: "Yes or OK" -Speech input detects proper response of the word "yes". -The PIR sensor input detects motion. -The thermopile sensor input is now below x degrees. -The forward IR distance sensor input shows all clear ahead. *Note: Ping radar is set so it is only active when the robot is in motion. -The robot makes an announcement: "Thank you." -With the correct verbal response plus all forward sensors showing "clear" then the robot is ok to proceed. -A forward command is sent to the Sabertooth drive motor controller. The robot resumes forward motion. Once again the robot is searching for beacon #2. The script ignores all other blink patterns except for beacon #2. It uses wall following techniques and compass heading to find and work its way through the next doorway. -The robot encounters a new blink pattern. The robot counts two blinks and confirms it is in the Kitchen (K). -Based on information in the script about the location of the BCDS plus the current compass heading, the robot makes a decision on what direction to take. -A command is sent to the Sabertooth drive motor controller. The robot turns and tries to go south (because the script tells it that if you are in the Kitchen then the way to the BCDS is south while following the east wall). The script counter is reset to zero. The script ignores all other blink patterns.
New directive:
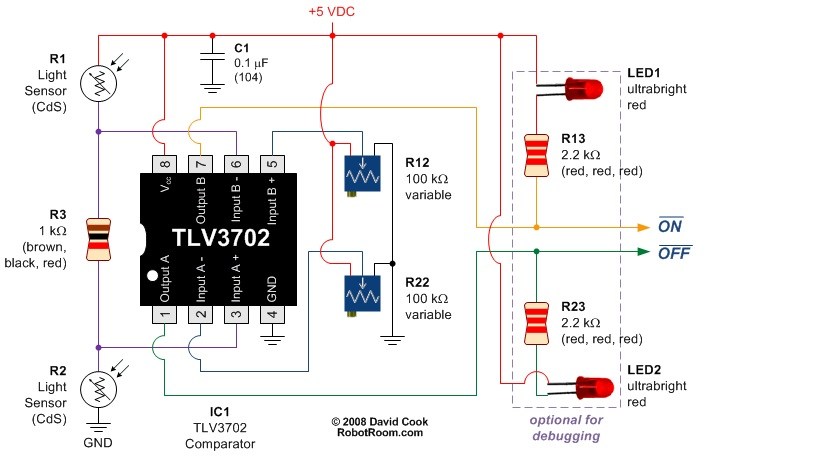
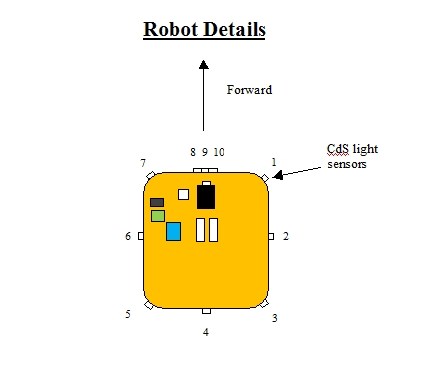
-The robot is now searching for the BCDS laser. It uses wall following techniques and compass heading to find and work its way through the next doorway. -The omni-cone receiver analog input has not detected any IR blinks for x seconds. If no IR blinks are detected for x seconds then robot has confirmed that it has entered the Living Room (LR). -Based on information in the script about the location of the BCDS plus the current compass heading,the robot makes a decision on what direction to take. -A turn command is sent to the Sabertooth drive motor controller. The robot turns and tries to go north (because the script tells it that if you are in the LR then the way to find the BCDS laser is north while following the west wall). -The robot encounters the BCDS laser beam: (See Robot Details on page 7) >The robot has 10 CdS light sensors mounted around the perimeter of the middle deck of the robot. Sensors 1 through 7 are all hooked to the same digital input so no matter which one the laser strikes first it will cause the robot to stop and then rotate until it strikes sensor #9. Sensors 8, 9, 10 are each on separate digital inputs. There are circuits on board on the robot that output a digital Logic "1" when the laser strikes a CdS sensor.
yes i have the thermopile,witch one did you get,also i bought a very good PIR sensor if you look at my brookstone rover project
t hought about using beacons and using a transmitter for each one,first cost is high second i want all sensors on my robot ,and none in any rooms for many reasons
I also have a few other sensor designs for my main robot ,lux sensor and maybe LIDAR
on using CDS you will have a problem with any light hitting it,need something like IR detector to block light
another idea you said i see you are using CDS for is for a laser,what you really need is a LASER photodiode for the wavelength of the laser sensor,this will not let any light in but the laser
Fred, the CdS circuit is not sensitive to lighting changes. Watch the video at Laser-Detector
Note: I will not be using the latching chip.