

























































-636113389122355023.jpg)
-636113389180472117.jpg)
-636113389229237163.jpg)
-636113389290829174.jpg)


-635785172055556250.jpg)
-635785172158993750.jpg)
-635785172247743750.jpg)
-635785172413525000.jpg)

-635785172535868750.jpg)






-635539160746588750.jpg)
-635539160942370000.jpg)
-635539151418620000.jpg)
-635539151686276250.jpg)
-635506236904022500.jpg)
-635506236982460000.jpg)








-635541830861718750.jpg)
-635541830952968750.jpg)
-635542009881406250.jpg)
-635542010005625000.jpg)

-635542010164062500.jpg)
-635542010239375000.jpg)
-635550292359666250.jpg)
-635550292425760000.jpg)
-635550292762791250.jpg)
-635550292882166250.jpg)





-635588389714074531.jpg)
-635588389830012031.jpg)
-635588389903605781.jpg)
-635588390025480781.jpg)




-635740342543525000.jpg)
-635740342848525000.jpg)

-635740343052275000.jpg)





-635654945956718750.jpg)
-635654946193593750.jpg)
-635654944503750000.jpg)
-635654944608125000.jpg)
-635654945569687500.jpg)
-635654945677031250.jpg)
-635654945774843750.jpg)
-635654947723906250.jpg)
-635649848340668750.jpg)
-635649848423325000.jpg)
-635649848495512500.jpg)
-635649848636293750.jpg)
-635649848698012500.jpg)
-635648558878637500.jpg)
-635648558955200000.jpg)
-635648559038168750.jpg)

-635751639905293516.jpg)
-635751639972481016.jpg)
-635751640035137266.jpg)
-635608349000797500.jpg)
-635608350446578750.jpg)
-635608350539860000.jpg)
-635608350602672500.jpg)



-635611773195797500.jpg)
-635611774051735000.jpg)
-635611774942985000.jpg)
-635611775598766250.jpg)
-635611775696110000.jpg)
-635611775779235000.jpg)
-635609741260641250.jpg)
-635609741333610000.jpg)
-635609741411735000.jpg)
-635609741477828750.jpg)
-635614157409705000.jpg)
-635614252981416015.jpg)
-635614253073603515.jpg)
-635614253146416015.jpg)
-635614265943447265.jpg)
-635629208523613281.jpg)
-635629208617050781.jpg)
-635629208700644531.jpg)
-635629208828769531.jpg)
-635629208897675781.jpg)
-635629208978769531.jpg)
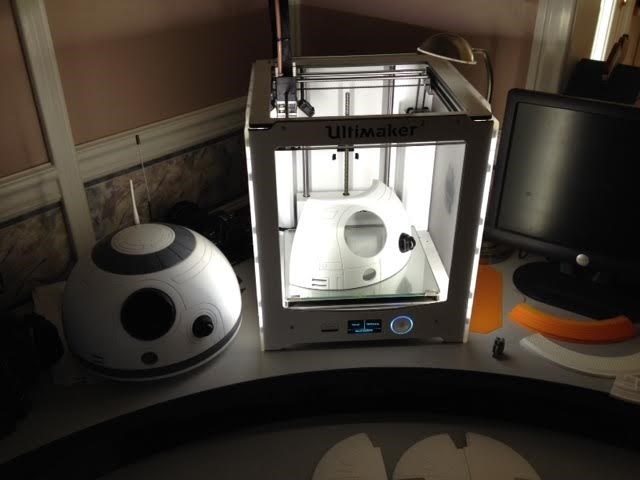
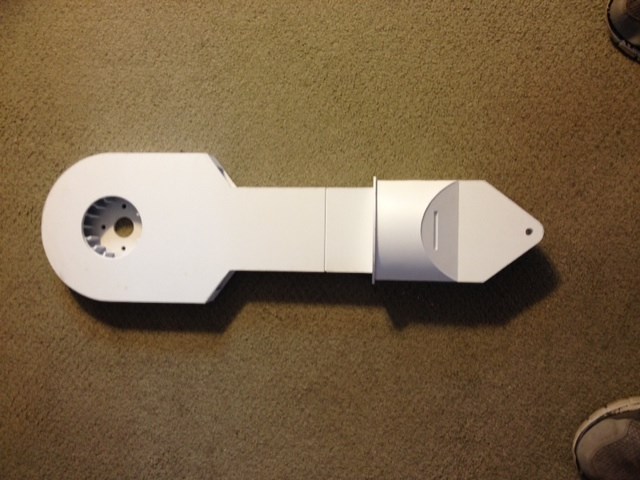
Hello everyone so i have begun building my full size astromech droid! I know that this project is going to take a long time but I feel it will be worth it in the end. My droid will be built from styrene and 3d printed parts. The dome is actually a security mirror but requires a 2" riser made from a floral craft ring and styrene cover.
so i have begun building my full size astromech droid! I know that this project is going to take a long time but I feel it will be worth it in the end. My droid will be built from styrene and 3d printed parts. The dome is actually a security mirror but requires a 2" riser made from a floral craft ring and styrene cover.









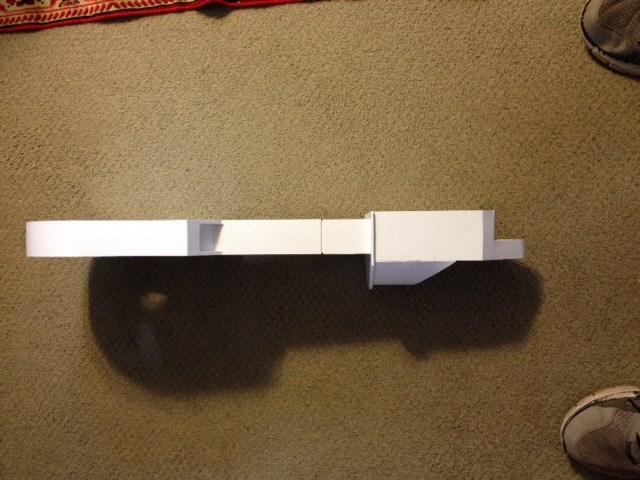
I wil be loading larger and not sideways photos soon.... stress
By robot56
— Last update
Discover more robots

Therat's My Own Wall-E
Learn the ez-robot platform to build RC ground and flying drones and a DIY WallE using a Roli kit and a newly won...

Ezang's For Some Fun, Arduino LCD Monitor And ARC Serial...
Test Arduino LCD and Synthiam ARC serial monitor 2021 EzAng

Tachyon's First Robot
Convert household junk into a remote-controlled robot using EZ-Robot EZ-B and Synthiam ARC for quick video control,...

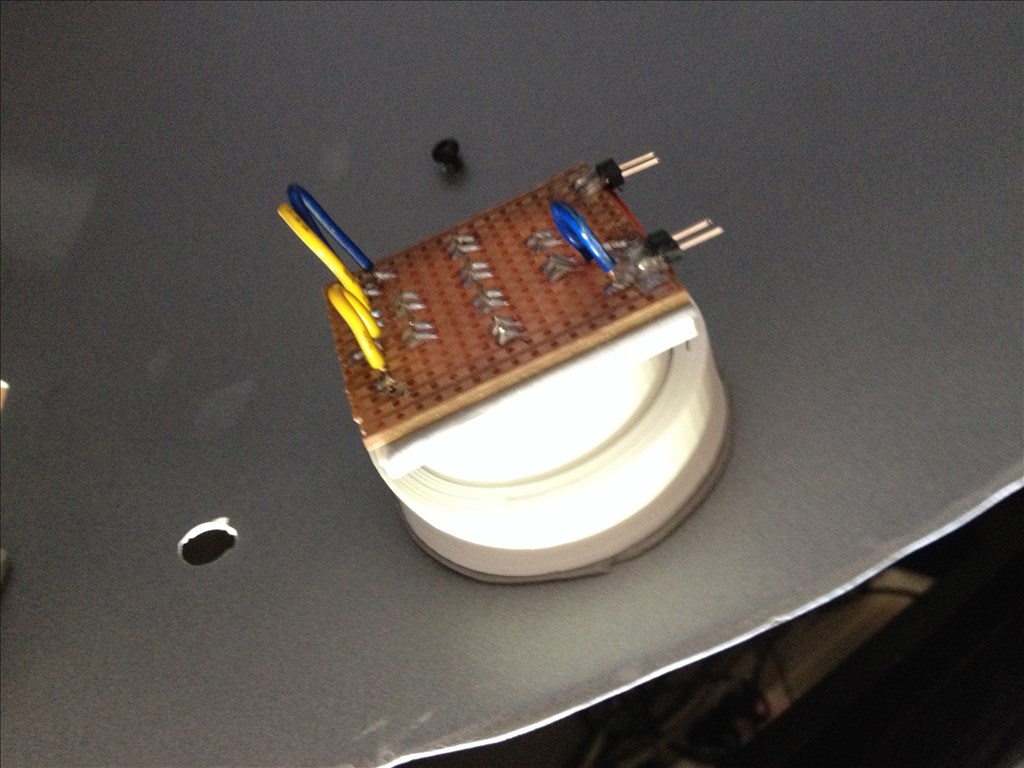
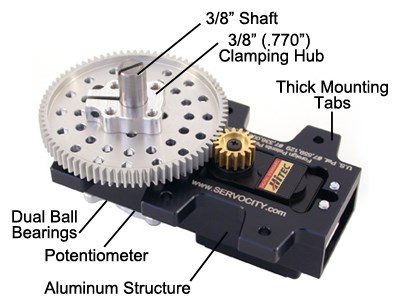
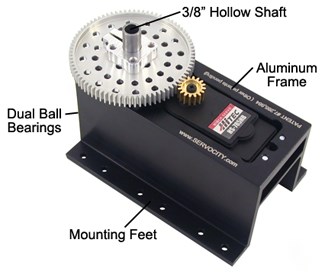
ok so I took some more detailed photos of the domes drive system:
this is the servo gearbox mounted with the 4 mounts that I printed. I used 1/2 inch delrin square stock to space out the mounts and to bolt down the servo gearbox. bellow you can see how the gearbox is floating between the frame rails and is easily removed.
I used a piece of plastic to key in the main spur gear and the outer bearing.
Finally the 2 inch riser is placed onto the outer bearing and the dome is velcro'd to the top of the riser
that is really kick ass! I tried something similar with mine.. but could not get the torque right and it was killing the servo trying to spin the dome. Well done!
I love it! I think your doing a fantastic job. Makes me want to start building my own.
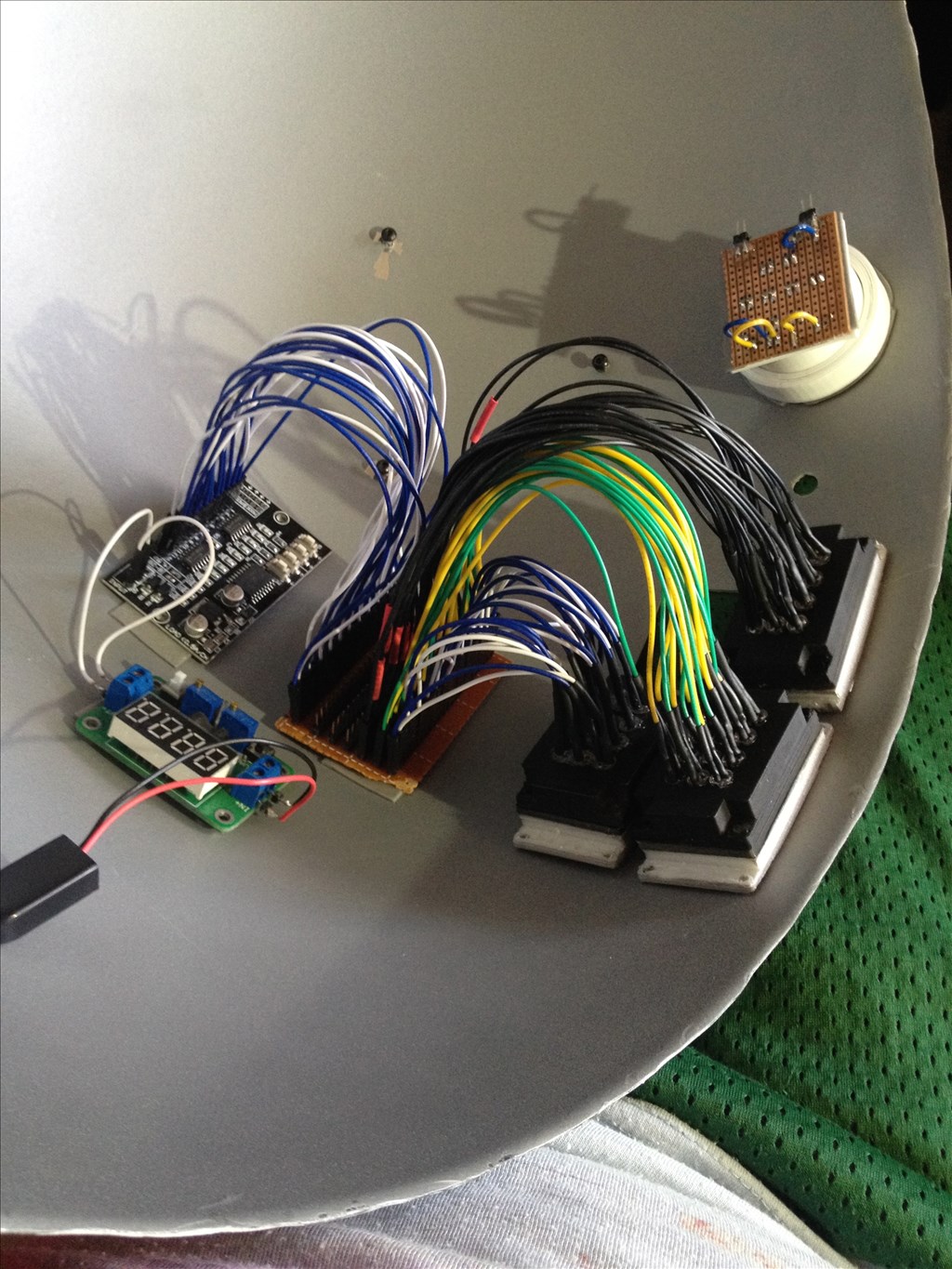
hey guys I have a small update and need some help with my build.
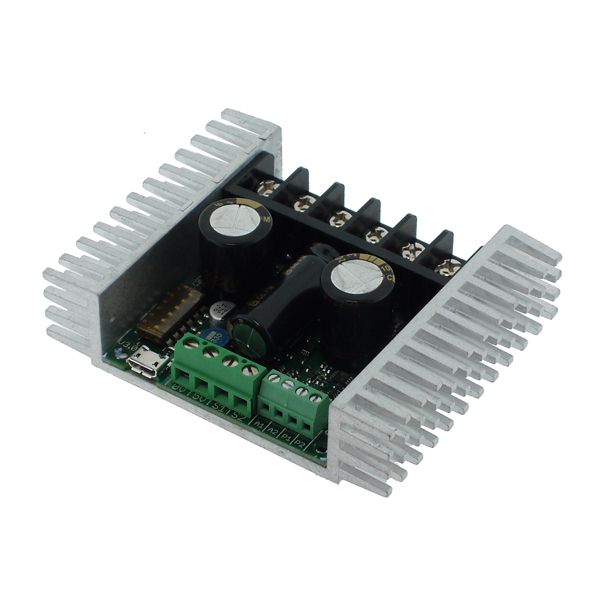
Yesterday I went to Orvac electronics and got a 12 volt battery and a power distribution board with a built in fuse box incase the worst happens...
I mounted the power distribution board into the frame and connected the amp and the V4 to the 12 volt power source. I was super pleased with how it looks and the fuses are easily changed from the top. I need to lower the amp though so that I can easily adjust the sound..
The problem I'm having though is when I power both the ezb and amp from the same power board, the servo moving the head no longer rotates and makes a strange buzzing noise. To try and diagnose the issue I separated the amp and ezb so that way they were powered by their own independent battery. When I did this the servo worked perfectly. I then reconnected the ezb back to the power distribution board, without the amp, and the servo would still not rotate correctly. Therefore I have isolated the issue to the power board/fuse box. confused
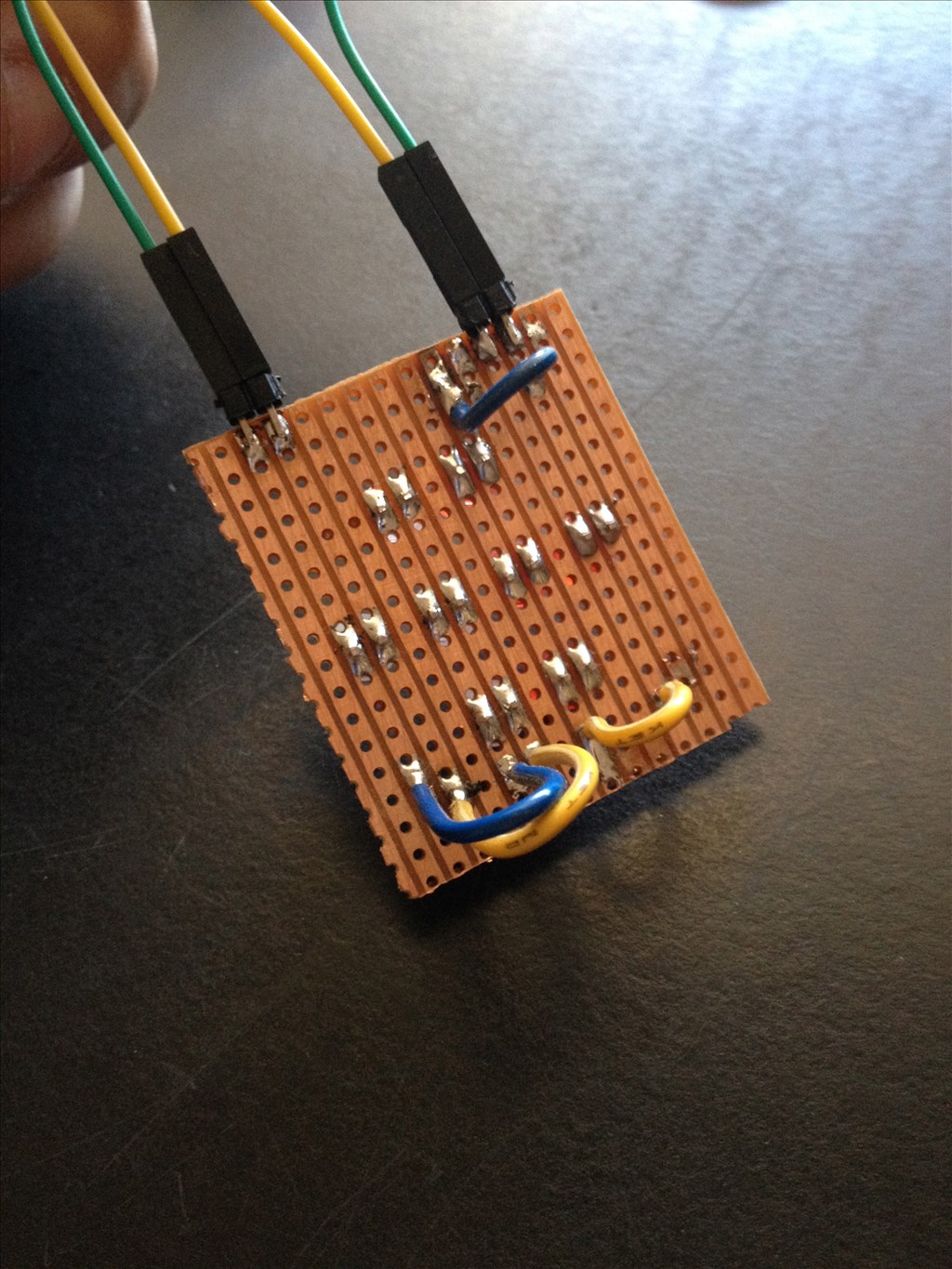
this is a picture of inside the power distribution board:
I think that there may be a ground issue within the power board that i bought? Any suggestions would be great..
Thanks guys Aaron
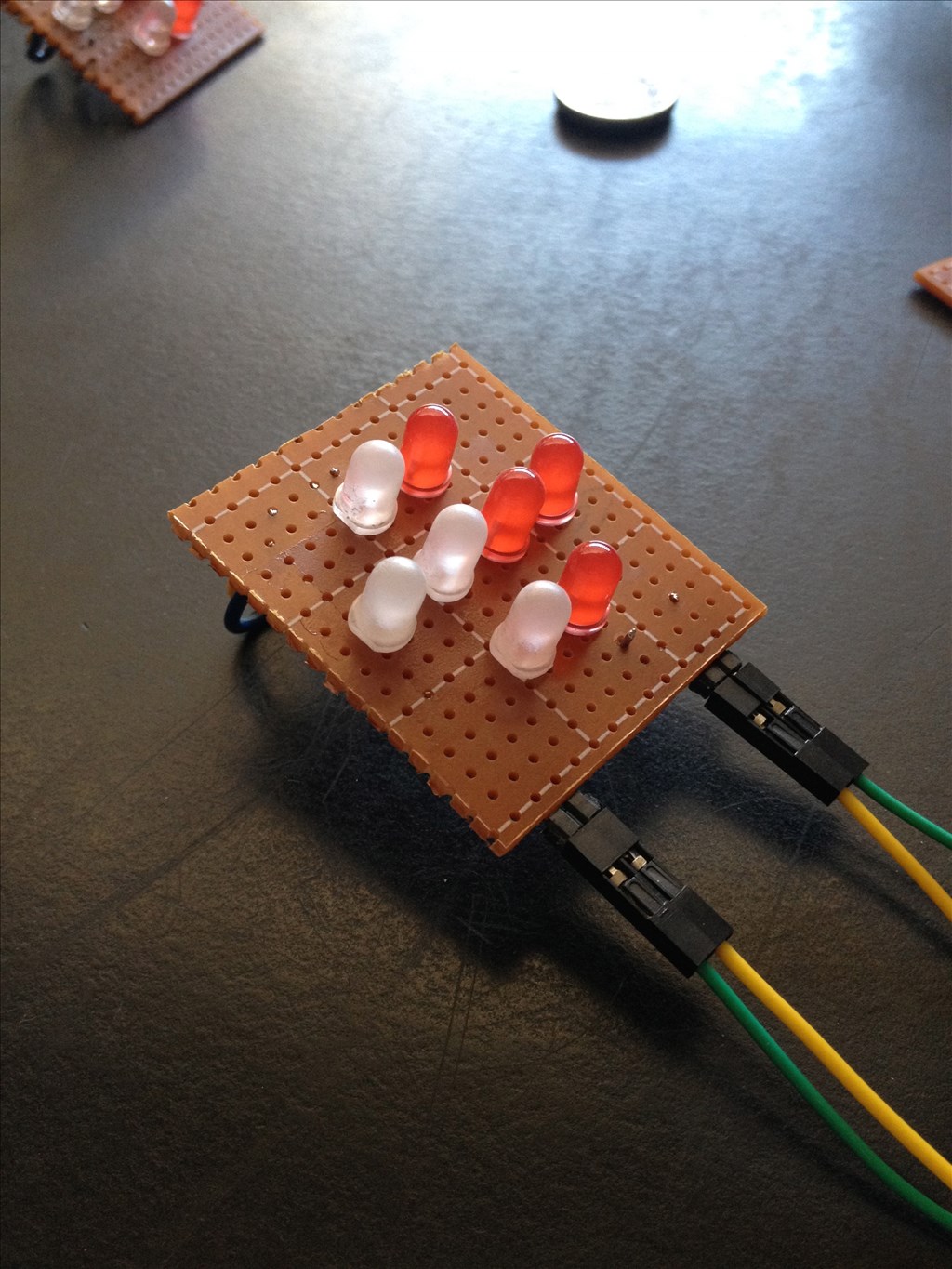
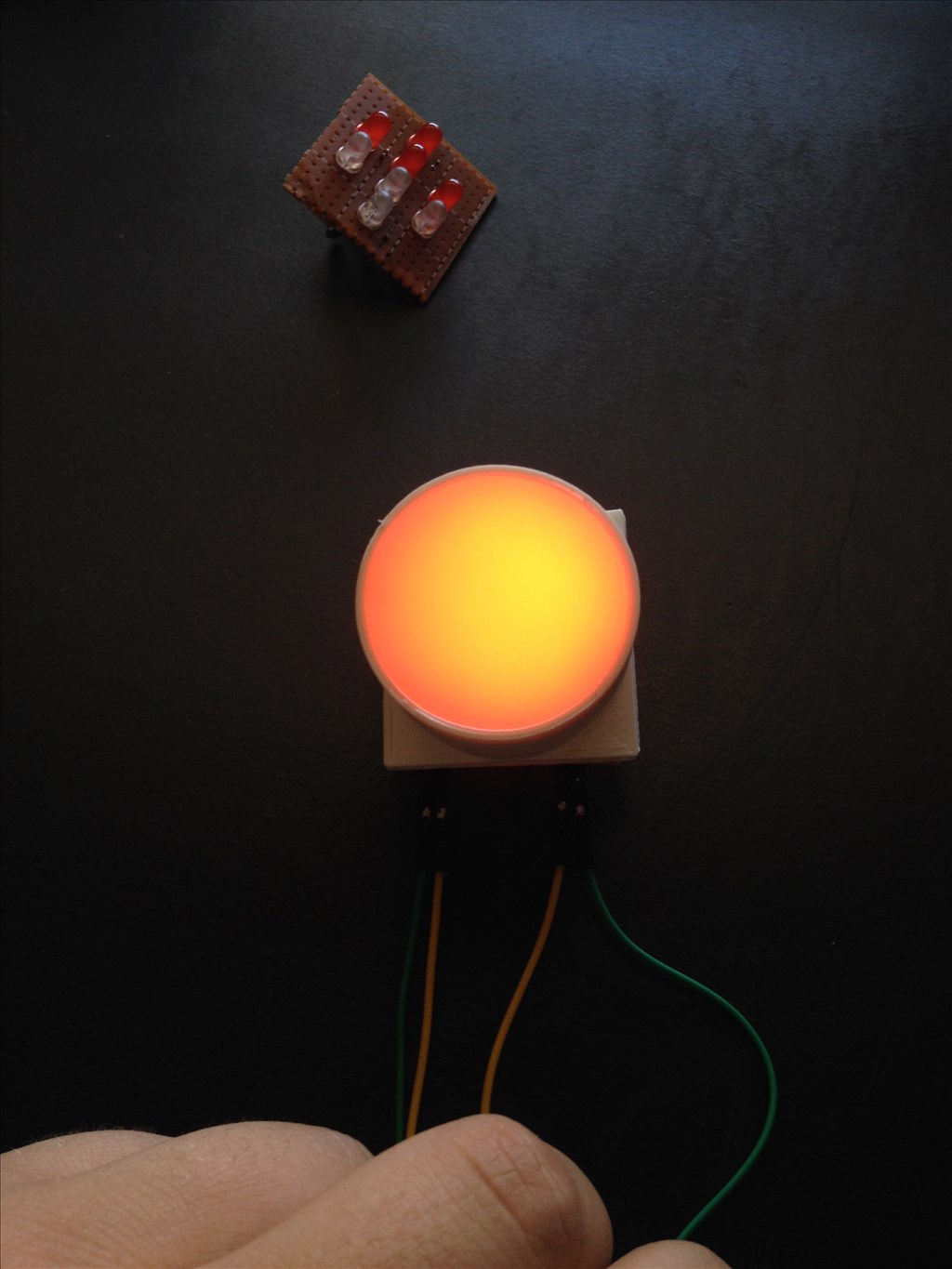
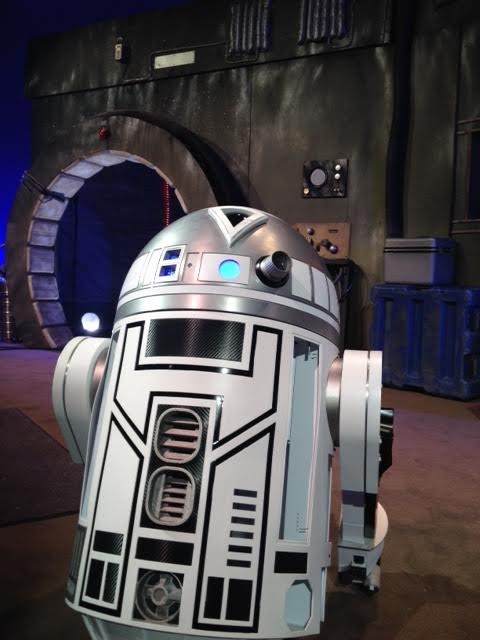
Also I got the sound system up and running! the sound quality is way better than i expected
the sound quality is way better than i expected
R7 finally has some personality
Looking great! I'm a big R2 fan so I'll be sure to follow this thread as you update your bot!
By the way, did you figure out your possible grounding issue?
Your build is looking great! Very cool!