

























































-636113389122355023.jpg)
-636113389180472117.jpg)
-636113389229237163.jpg)
-636113389290829174.jpg)


-635785172055556250.jpg)
-635785172158993750.jpg)
-635785172247743750.jpg)
-635785172413525000.jpg)

-635785172535868750.jpg)






-635539160746588750.jpg)
-635539160942370000.jpg)
-635539151418620000.jpg)
-635539151686276250.jpg)
-635506236904022500.jpg)
-635506236982460000.jpg)








-635541830861718750.jpg)
-635541830952968750.jpg)
-635542009881406250.jpg)
-635542010005625000.jpg)

-635542010164062500.jpg)
-635542010239375000.jpg)
-635550292359666250.jpg)
-635550292425760000.jpg)
-635550292762791250.jpg)
-635550292882166250.jpg)





-635588389714074531.jpg)
-635588389830012031.jpg)
-635588389903605781.jpg)
-635588390025480781.jpg)




-635740342543525000.jpg)
-635740342848525000.jpg)

-635740343052275000.jpg)





-635654945956718750.jpg)
-635654946193593750.jpg)
-635654944503750000.jpg)
-635654944608125000.jpg)
-635654945569687500.jpg)
-635654945677031250.jpg)
-635654945774843750.jpg)
-635654947723906250.jpg)
-635649848340668750.jpg)
-635649848423325000.jpg)
-635649848495512500.jpg)
-635649848636293750.jpg)
-635649848698012500.jpg)
-635648558878637500.jpg)
-635648558955200000.jpg)
-635648559038168750.jpg)

-635751639905293516.jpg)
-635751639972481016.jpg)
-635751640035137266.jpg)
-635608349000797500.jpg)
-635608350446578750.jpg)
-635608350539860000.jpg)
-635608350602672500.jpg)



-635611773195797500.jpg)
-635611774051735000.jpg)
-635611774942985000.jpg)
-635611775598766250.jpg)
-635611775696110000.jpg)
-635611775779235000.jpg)
-635609741260641250.jpg)
-635609741333610000.jpg)
-635609741411735000.jpg)
-635609741477828750.jpg)
-635614157409705000.jpg)
-635614252981416015.jpg)
-635614253073603515.jpg)
-635614253146416015.jpg)
-635614265943447265.jpg)
-635629208523613281.jpg)
-635629208617050781.jpg)
-635629208700644531.jpg)
-635629208828769531.jpg)
-635629208897675781.jpg)
-635629208978769531.jpg)
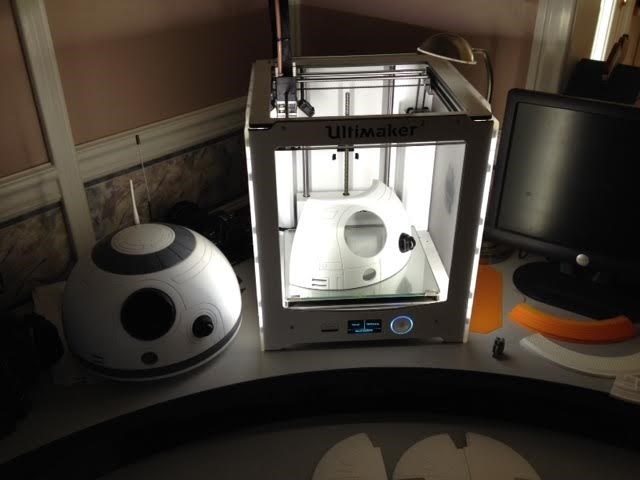
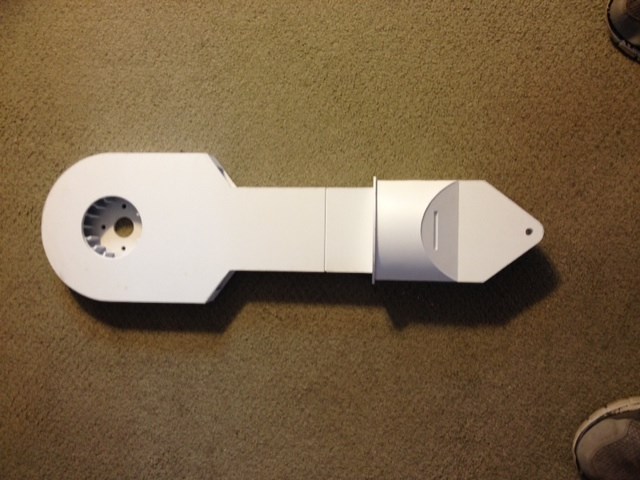
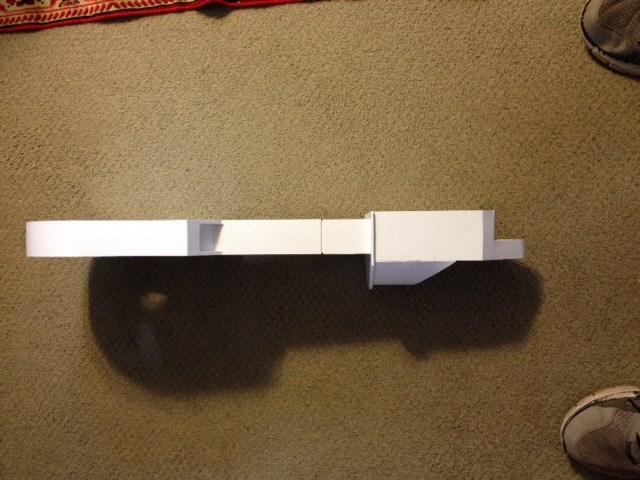
Hello everyone so i have begun building my full size astromech droid! I know that this project is going to take a long time but I feel it will be worth it in the end. My droid will be built from styrene and 3d printed parts. The dome is actually a security mirror but requires a 2" riser made from a floral craft ring and styrene cover.
so i have begun building my full size astromech droid! I know that this project is going to take a long time but I feel it will be worth it in the end. My droid will be built from styrene and 3d printed parts. The dome is actually a security mirror but requires a 2" riser made from a floral craft ring and styrene cover.









I wil be loading larger and not sideways photos soon.... stress
By robot56
— Last update
Discover more robots

Rb550f's Jo Robosapien Project
Custom Robosapien head from 3D kids projector with tinted LED face shield, adjustable R/C shocks, HD head servo and EZ-B...

Jstarne1's Meet Squeegee , The Flooring Mopping Robot ,...
Refurbish a RadioShack Robie Jr RC robot into a squeegee cleaner that navigates close to furniture, toilets and...

Ezang's My New Talking Mr. Head Robot
Mr. Head robot with jaw movements and more to come; I will be meeting AIMLbot soon

@jeremie Thank you! Yes I did figure out the problem.. the voltage regulator sold in the ez-robot store, as a servo extension, is only rated at 1 amp. I ended up getting another voltage regulator so that I could power the servo and ezb separately. After powering the two individually the servo motor ended up working normally
thank you @mcsdaver
@robot56 Everything is really coming along nicely. I like everything that you have done.
One thing I have noticed, and please don't take this as a criticism, but there is a bit of drift with the dome movement when it is stopping. Is this something that you are just going to live with or are you working on more precise starts and stops?
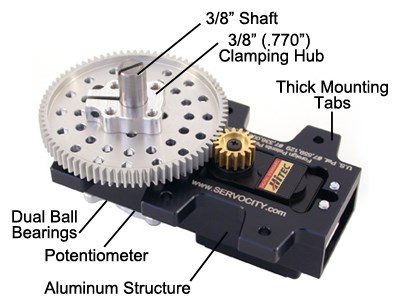
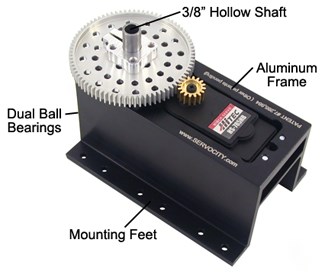
Also, with that gearbox you are using for the dome, what gear ratios did you go with?
@zap thank you! I don't consider it critisim at all I have noticed that the dome seems to want to drift at the end of it's rotation.. I'm thinking that the drift is because the domes weight as it is spinning. As the servo is locating it's position the inertia from the dome keeps the dome rotating slightly longer than it should be? I'm using a 2:1 gear ratio but one of the things on my list to try is a higher gear ratio since the gear are cheap to buy separately. Hopefully then the drifting will be reduced as the servo has a bit more torque to stop the dome.
I have noticed that the dome seems to want to drift at the end of it's rotation.. I'm thinking that the drift is because the domes weight as it is spinning. As the servo is locating it's position the inertia from the dome keeps the dome rotating slightly longer than it should be? I'm using a 2:1 gear ratio but one of the things on my list to try is a higher gear ratio since the gear are cheap to buy separately. Hopefully then the drifting will be reduced as the servo has a bit more torque to stop the dome.
It could also probably be programmed to be more accurate by scripting? The servo always seems to find center and the desired position proberly.. However it almost seems like there is a deceleration built into the servo at the end of a rotation lol
I have spent the last few days cutting and fitting skin mounts to the frame of my astromech. along the middle section/doors I used delrin that holds velcro to locate where the skins need to be lined up. then i made delrin mounts that screw to the frame on the side of the seam lines. The skins will be countersunk so that the screws sit flush with the side of the body Its finally starting to look like something!
Its finally starting to look like something!
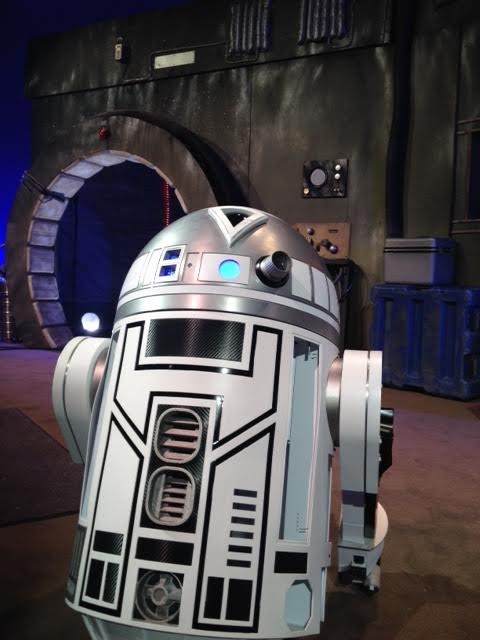
With Star Wars Celebration fast approaching and the added bonus that R7 needs to be loaded/displayed inside the facility a day before the convention starts it was time for me to start making some simple scripts. My goal is to make him as lively as possible for people walking by the display. I set up the camera to follow motion and faces, as well as wrote scripts for randomized audio files to be played within a certain interval. i will have an Ipad mounted by one of his lower doors to show people that he has a camera inside the dome. Next to his name display board I plan to have a QR code that will lead people to the ez-robot forum page and this build. hopefully people get a kick out of him as most the other droids just sit there with no movement whatsoever... I still have the skins and legs to paint before I can apply the black/carbon fiber vinyl and mount all of the other detail pieces.
hopefully people get a kick out of him as most the other droids just sit there with no movement whatsoever... I still have the skins and legs to paint before I can apply the black/carbon fiber vinyl and mount all of the other detail pieces.
For the first audio clip I need to find a file that isnt cut off but all in all for being completely randomized sound and movement i think he looks decent?
Looks fantastic in my opinion. Have fun at celebration!
Awesome and well done! thanks for the vid! If you can, send a few pics back from the Star Wars Celebration