

























































-636113389122355023.jpg)
-636113389180472117.jpg)
-636113389229237163.jpg)
-636113389290829174.jpg)


-635785172055556250.jpg)
-635785172158993750.jpg)
-635785172247743750.jpg)
-635785172413525000.jpg)

-635785172535868750.jpg)






-635539160746588750.jpg)
-635539160942370000.jpg)
-635539151418620000.jpg)
-635539151686276250.jpg)
-635506236904022500.jpg)
-635506236982460000.jpg)








-635541830861718750.jpg)
-635541830952968750.jpg)
-635542009881406250.jpg)
-635542010005625000.jpg)

-635542010164062500.jpg)
-635542010239375000.jpg)
-635550292359666250.jpg)
-635550292425760000.jpg)
-635550292762791250.jpg)
-635550292882166250.jpg)





-635588389714074531.jpg)
-635588389830012031.jpg)
-635588389903605781.jpg)
-635588390025480781.jpg)




-635740342543525000.jpg)
-635740342848525000.jpg)

-635740343052275000.jpg)





-635654945956718750.jpg)
-635654946193593750.jpg)
-635654944503750000.jpg)
-635654944608125000.jpg)
-635654945569687500.jpg)
-635654945677031250.jpg)
-635654945774843750.jpg)
-635654947723906250.jpg)
-635649848340668750.jpg)
-635649848423325000.jpg)
-635649848495512500.jpg)
-635649848636293750.jpg)
-635649848698012500.jpg)
-635648558878637500.jpg)
-635648558955200000.jpg)
-635648559038168750.jpg)

-635751639905293516.jpg)
-635751639972481016.jpg)
-635751640035137266.jpg)
-635608349000797500.jpg)
-635608350446578750.jpg)
-635608350539860000.jpg)
-635608350602672500.jpg)



-635611773195797500.jpg)
-635611774051735000.jpg)
-635611774942985000.jpg)
-635611775598766250.jpg)
-635611775696110000.jpg)
-635611775779235000.jpg)
-635609741260641250.jpg)
-635609741333610000.jpg)
-635609741411735000.jpg)
-635609741477828750.jpg)
-635614157409705000.jpg)
-635614252981416015.jpg)
-635614253073603515.jpg)
-635614253146416015.jpg)
-635614265943447265.jpg)
-635629208523613281.jpg)
-635629208617050781.jpg)
-635629208700644531.jpg)
-635629208828769531.jpg)
-635629208897675781.jpg)
-635629208978769531.jpg)
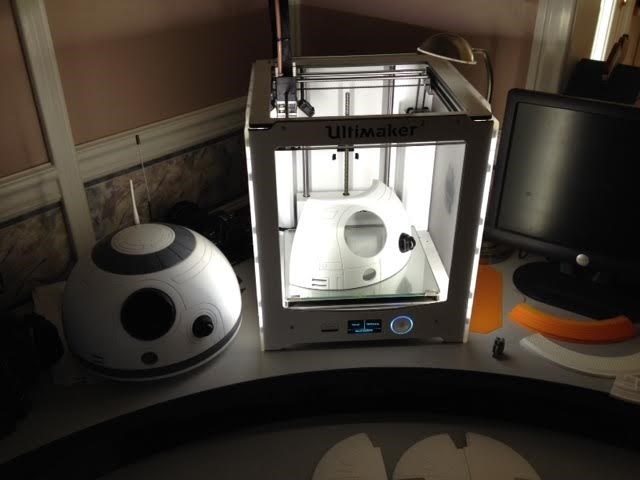
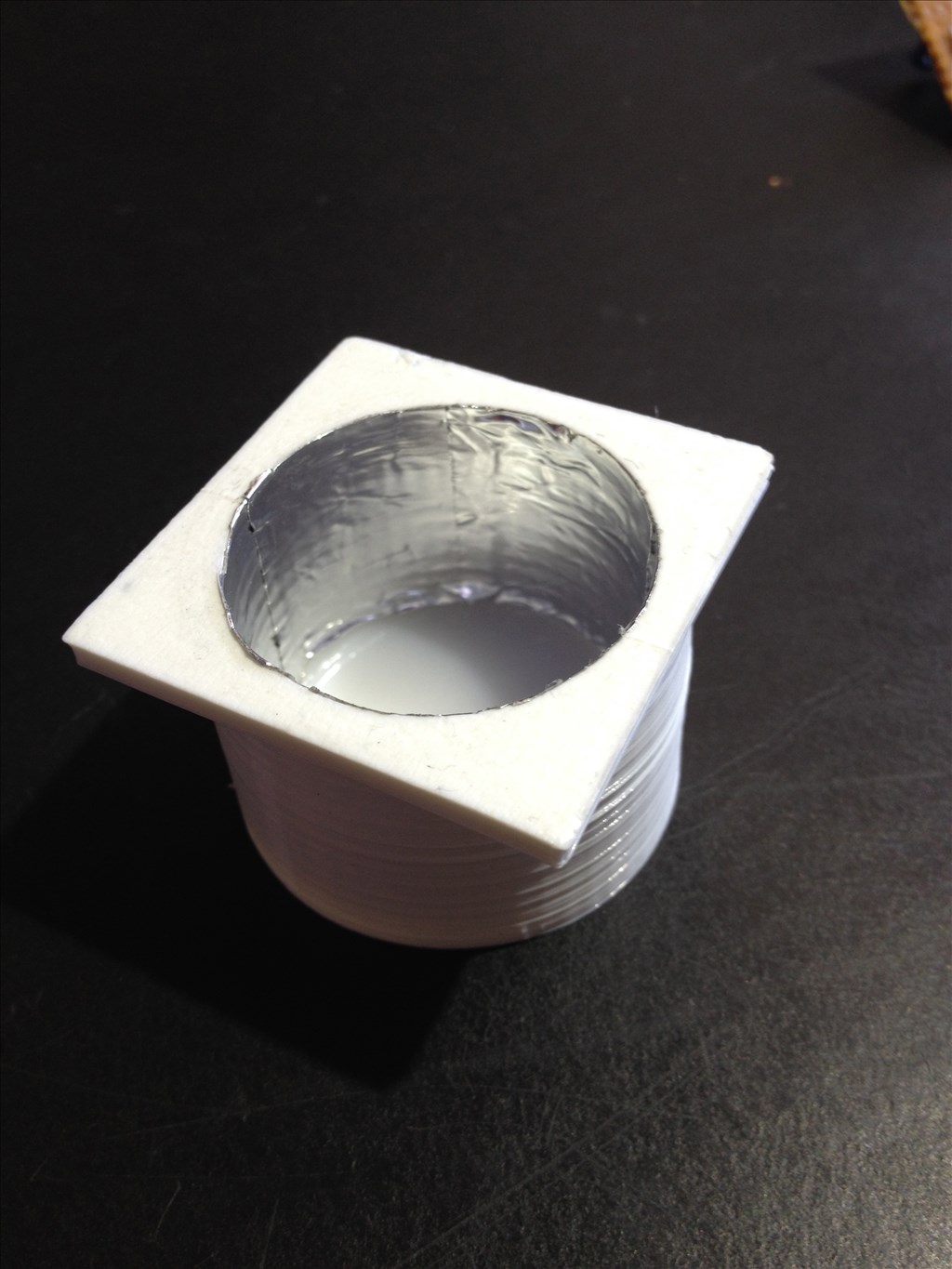
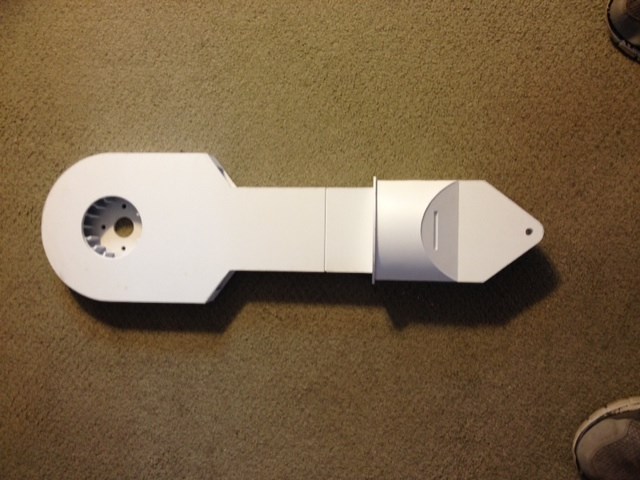
Hello everyone so i have begun building my full size astromech droid! I know that this project is going to take a long time but I feel it will be worth it in the end. My droid will be built from styrene and 3d printed parts. The dome is actually a security mirror but requires a 2" riser made from a floral craft ring and styrene cover.
so i have begun building my full size astromech droid! I know that this project is going to take a long time but I feel it will be worth it in the end. My droid will be built from styrene and 3d printed parts. The dome is actually a security mirror but requires a 2" riser made from a floral craft ring and styrene cover.









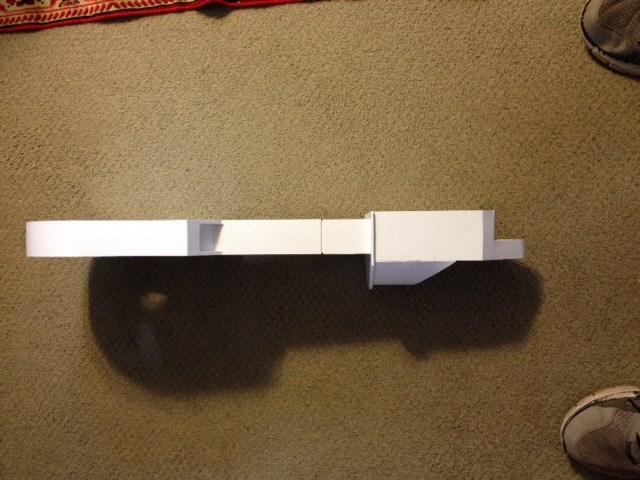
I wil be loading larger and not sideways photos soon.... stress
By robot56
— Last update
Discover more robots

Charleybot's Project Multi-Omnibots 2000
Upgrade Omnibot 2000s with Mini-ITX PCs, 12V battery power, servo-replaced arms, L298 motor controllers, USB Lifecam...

DJ's Omnibot TV Watching
Synthiam ARC and EZ-SDK enhanced motion tracking with improved edge detection for omnibot vision, demonstrating cartoon...

Rich's The Testbot
Testbot: low-cost EZ-B robot built from spare parts to test scripts, sensors (ultrasonic, IR, camera), and troubleshoot...

Sorry for being dense and asking all the questions....I just like some of the unconventional stuff that you have done. So the Omni-wheels do not provide any drive? They just act as casters for rotation?
@Zap Brannigan
Don't worry about questions! I'm glad that there are some people interested in it enough to ask!
I'm glad that there are some people interested in it enough to ask!
The omniwheels are not driven. I originally made it to use the traditional caster setup but after watching how unstable some of the droids were during turning around at star wars celebration I decided to go with something else. With the omniwheel you are getting a HUGE footprint for the weight of the droid to rest on (not just 2 little wheels) and when the droid rotates the smaller outer casters spin so that the wheels never have to physically turn. There are a couple guys on astromech using this type of a setup now. I hope it becomes standard because the droids are much more stable and not so terrifying to drive with the omniwheels lol
I wanted to use omniwheels in the rear legs too instead of the small ball casters but ran out of room trying to get everything to fit. The main drive wheels are way too big
Nice video update. He moves around really well. The omniwheels make a great difference. Shame you couldn't get any on the side legs too, but it moves around so well, I don't think it would have made much of a difference as he is moving around great as it is.
Keep up the good work.
Awesome. I really like that setup. Can you point me to the specs on it?
@Zap Brannigan yeah no problem! I also 3d printed the omniwheel hub that bolts up to the a&a front ankle. I have the files if you ever wanted to print or modify them for your needs. I believe there is a picture of the full ankle assembly a couple of pages ago.
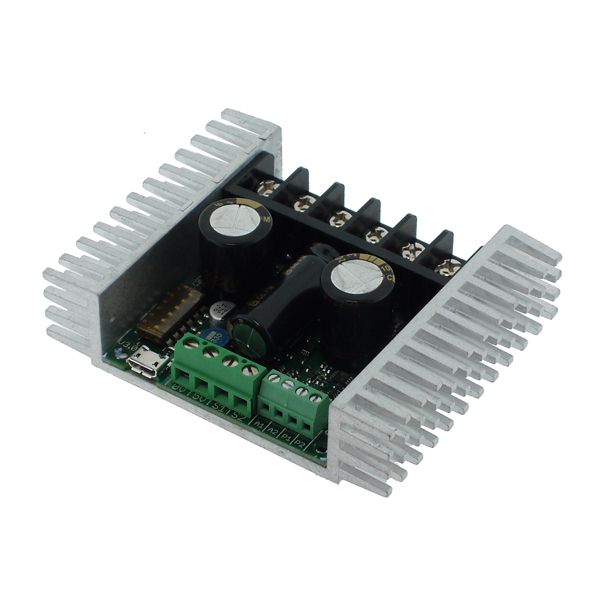
Vex Pro Link:
mcmaster carr link:
what I used:
from vex robotics: 4x 4" omniwheel 217-2584 4x 3/8" flanged bearing 217-2732 1x 1/4" acetal spacer with 3/8" hex 217-3260
from Mcmaster Carr: 4x flanged sleeve bushing 6338k414 1x 3.5" long 3/8" steel bolt 92240A950 3/8" nylon lock nut
Excellent astromech, were you using any of the dave everett styrene plans? Very cool droid.
@r2d2tech01 sorry for the late reply! I haven't logged onto my thread in a while! my frame is based off of Dave's but the legs were cut by Frank over at media conversions thank you!
thank you!
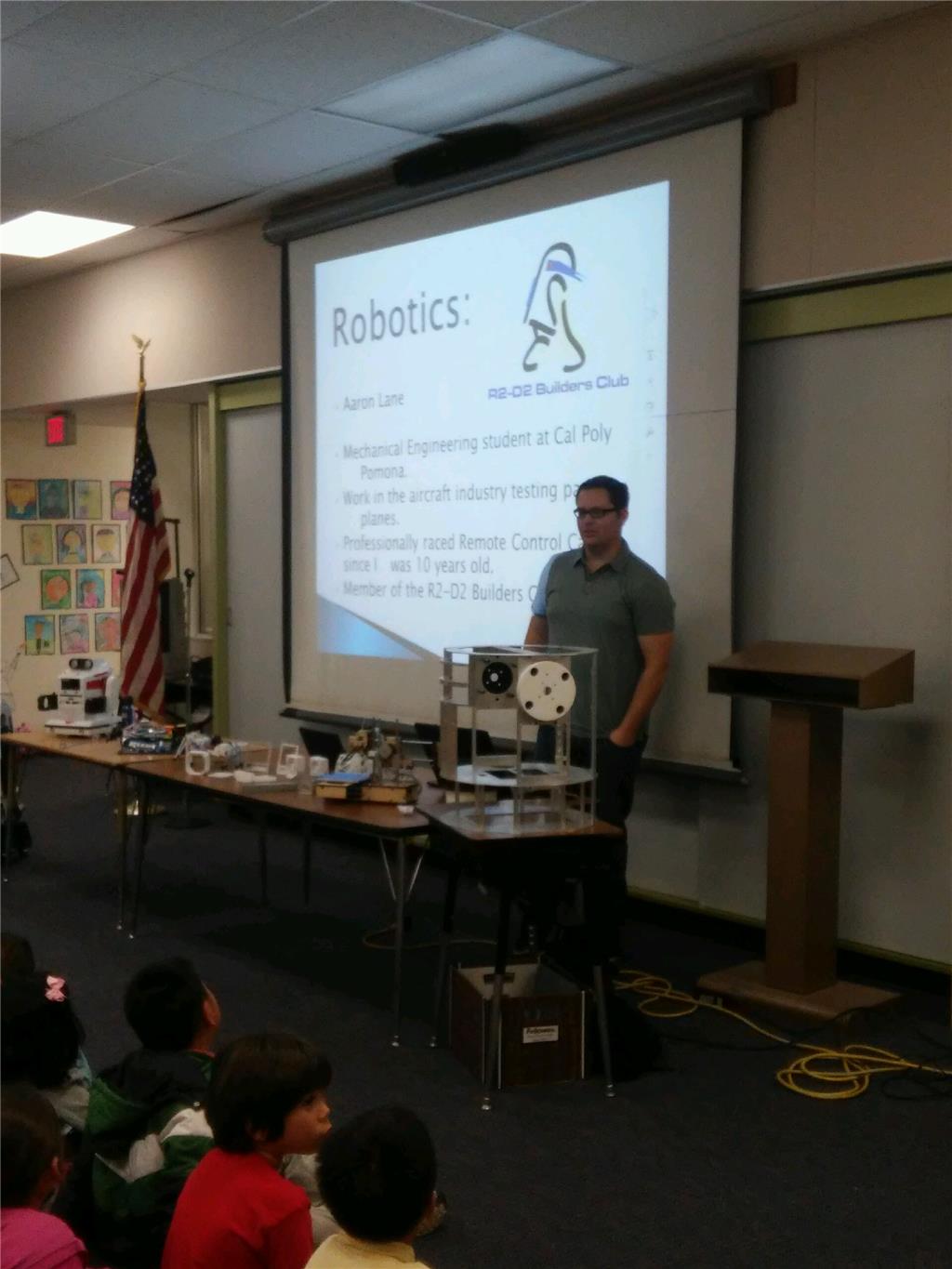
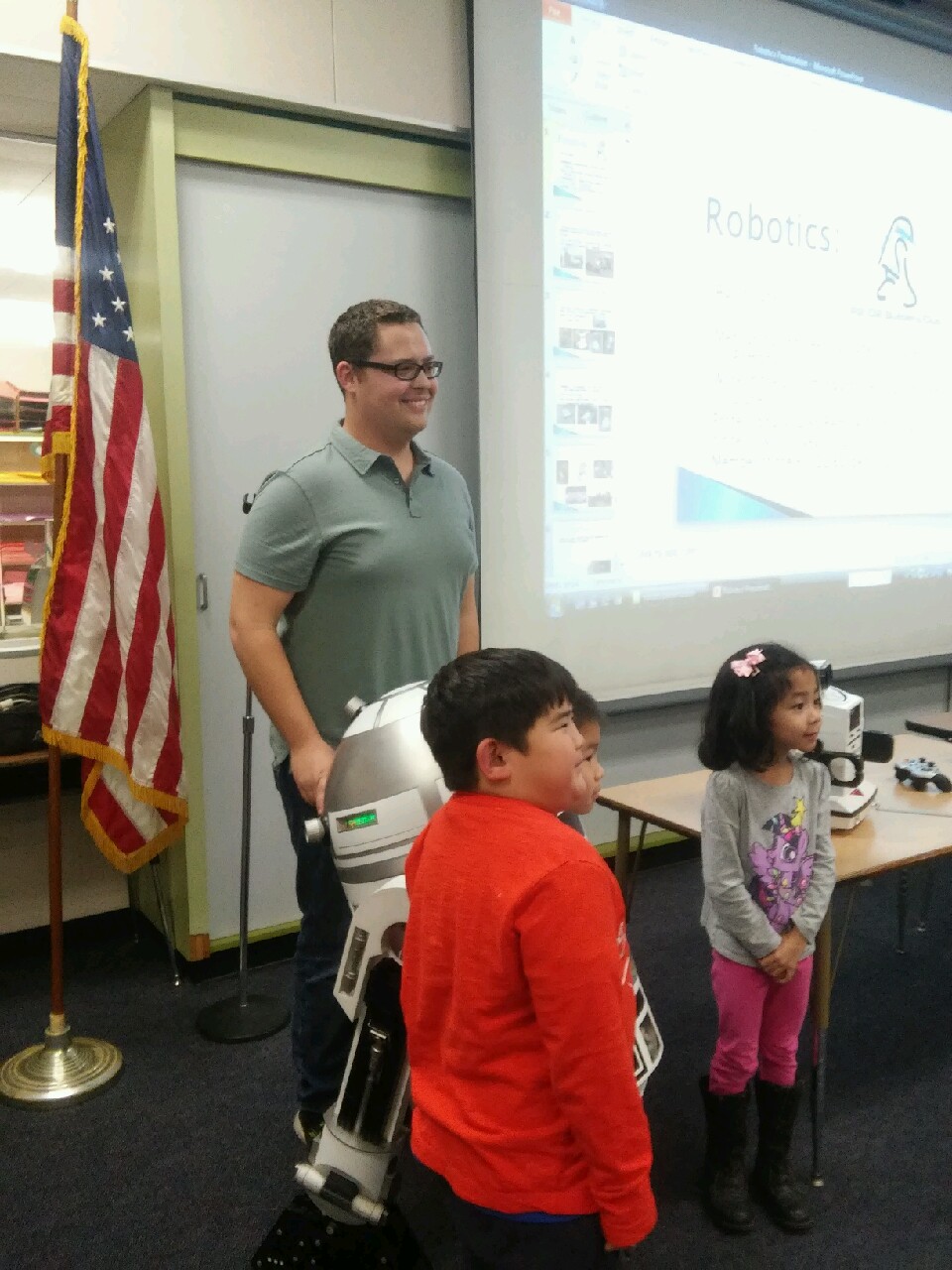
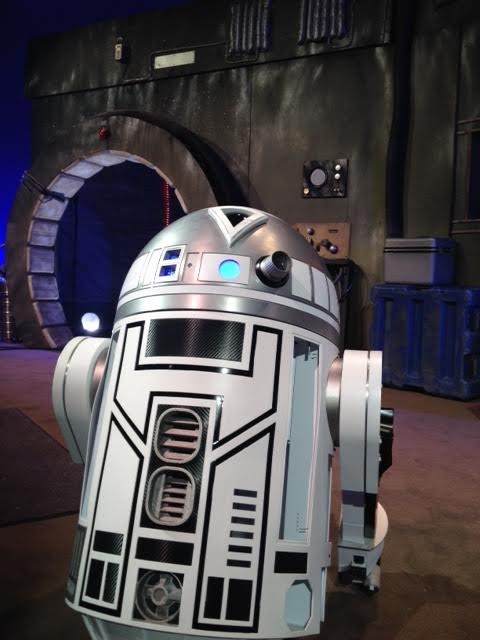
I got to take my droid to work the other day because I had to leave early and give a presentation to a local elementary school about robotics and coding. The production of my job was zero for the 4 hours the robot was in the building lol
The school uses a website called coding.org and is a great way for kids to start learning code. The principal asked if i would be willing to bring my robot and do 2 thirty minute presentations to k-6th grade.
All went well and the kids really enjoyed seeing the robot in action
Aaron