











Antonn started off as Lilian. She had the ability to move through the family room, react using voice commands, speak, and amuse as requested. She had a camera mounted under her nose, and eyes that moved, followed via tracking etc. Her arms were originally borrowed from Jd, but were replaced with a weak copy of "Poppy’s" arms. The arms were modified to use standard servos instead of the strong dynamixel servos. Being a prototype, she has been stored away and may come back as "Antonnett" some day if, Antonn decides to retire.
Due to a Halloween project called Madame Ninndo, which was developed using an Ez Robot's EZBv4, the idea for Antonn came to be.
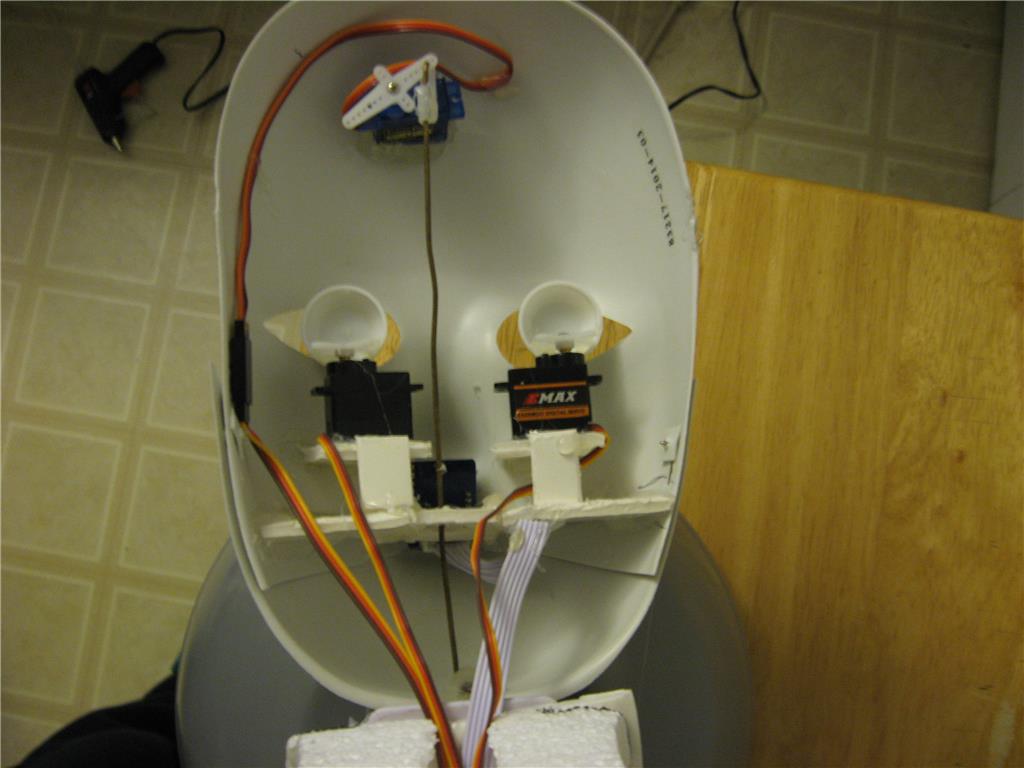
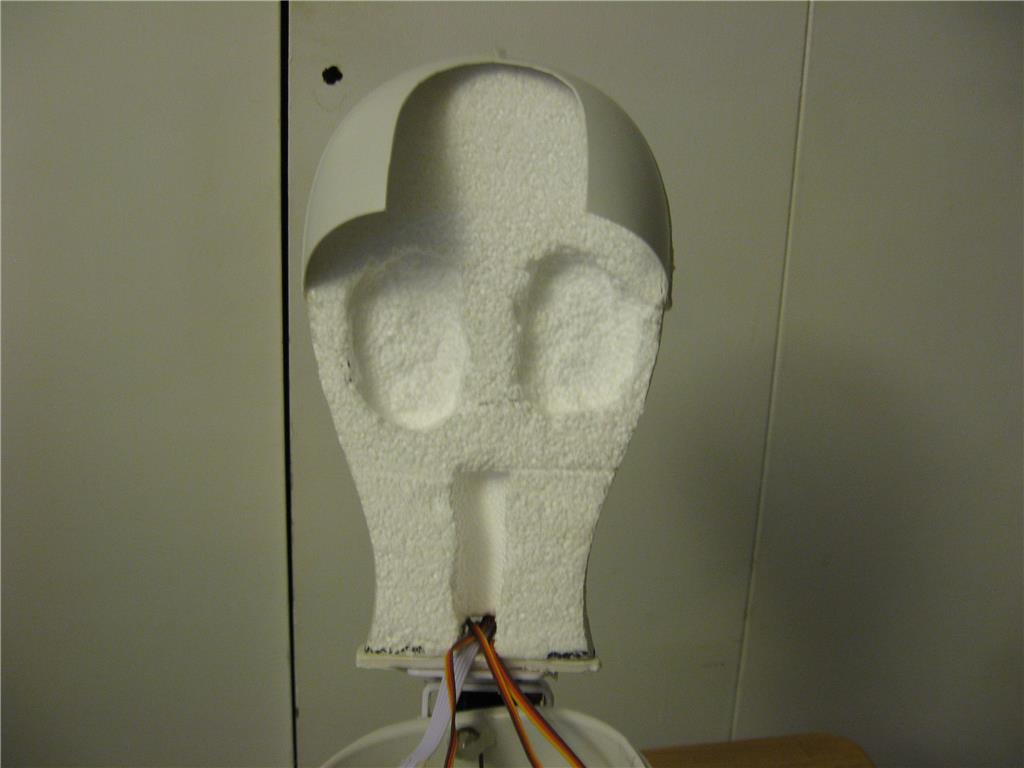
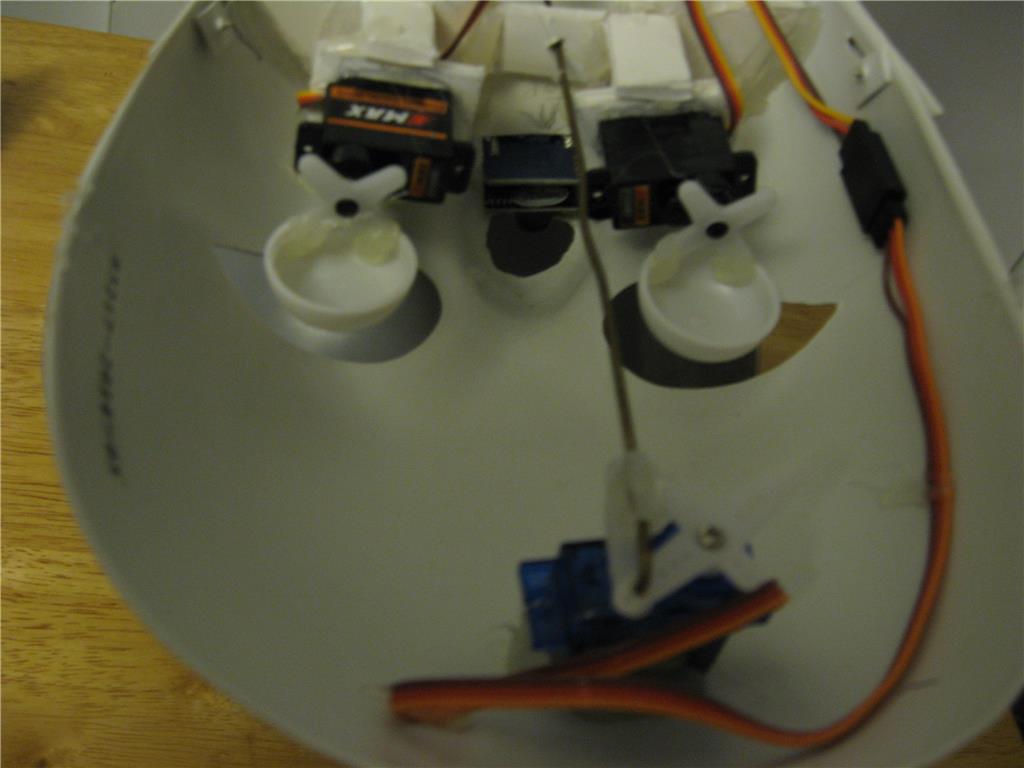
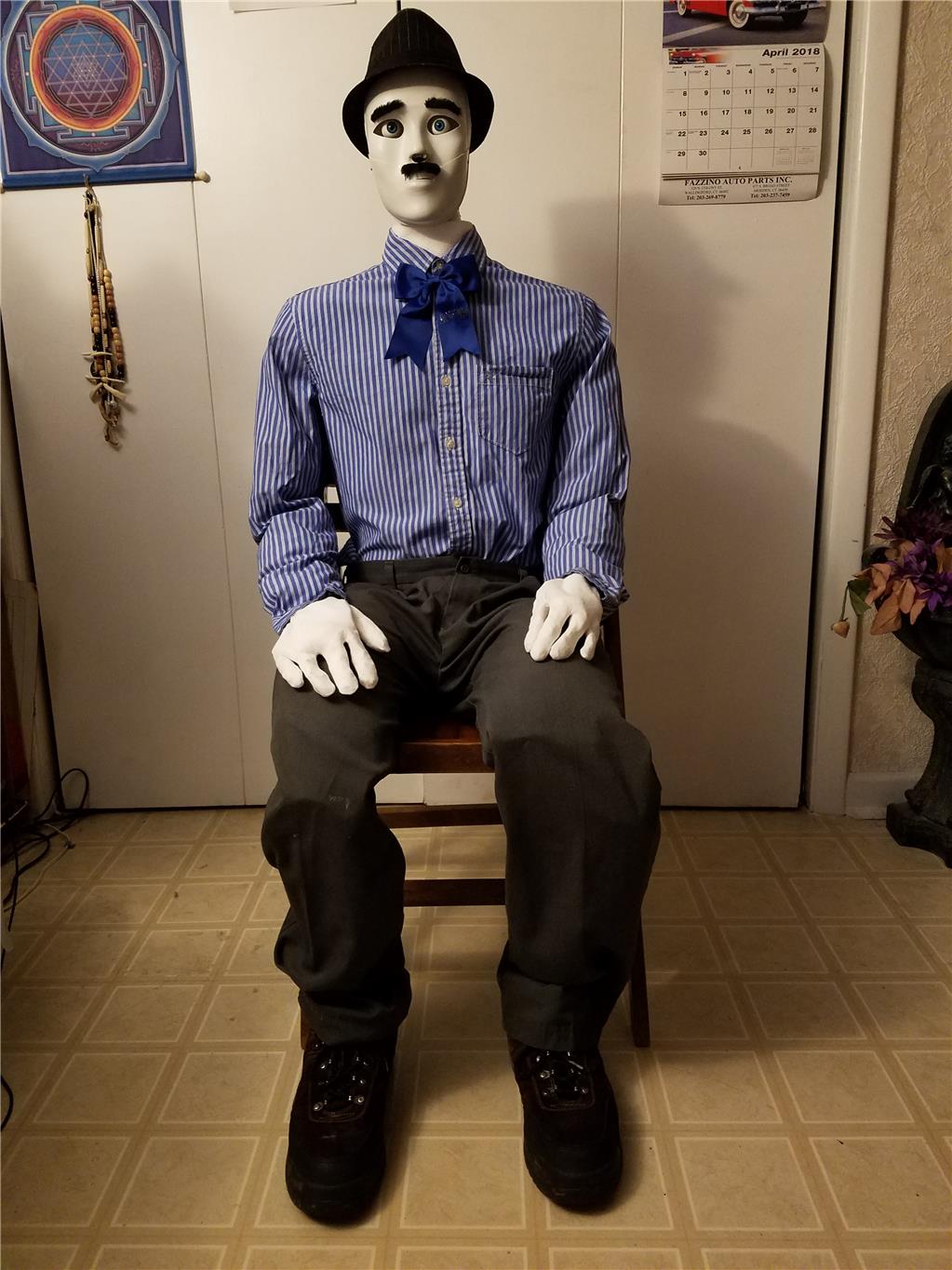
Lilian gave up her life for now. Modifications to the mask were made to allow jaw movement. The original easter egg eyes are replaced with doll eyes, giving a better look. (pun intended)
The scripting is a continuing process. Antonn currently can respond to about 30 plus phrases, turn on lights and appliances,(using old technology built before Alexa). He also uses Alexa to perform duties he is to lazy to do because "she is very helpful". He will soon operate and interact with my R2D2 and Minion Stuart.
A video will come, but my video graphic skills are lousy. I will plan a time soon to have a conversation with Antonn and record it.
The computer I normally use doesn’t have Win 10 installed yet, so the new plugins are not able to run with him yet. I will install the upgrade soon and see how he converses with cloud power.


Discover more robots
Perry's Scratch

Markthebotbldr's What Should I Name This Robot?


Hello @Mickey666Maus,
Thank you for the compliment.
Yes a stationary head is fun to work with. I still need to add more features and abilities to him. It is a lot of fun to see him interact with my Echo Dot.
The Poppy arms may come out to the project bench again now that Dj has given us the new servos. Lack of power and "buzzing" was one of the reasons I never went further with them. I will be getting some servos soon and see what they do.
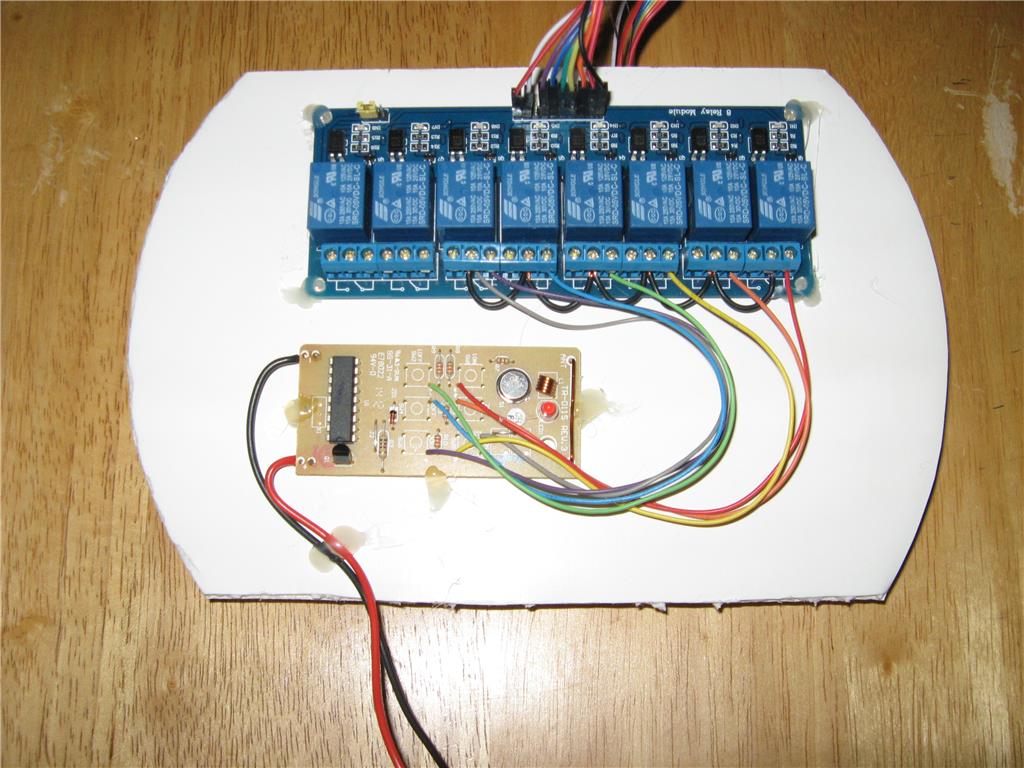
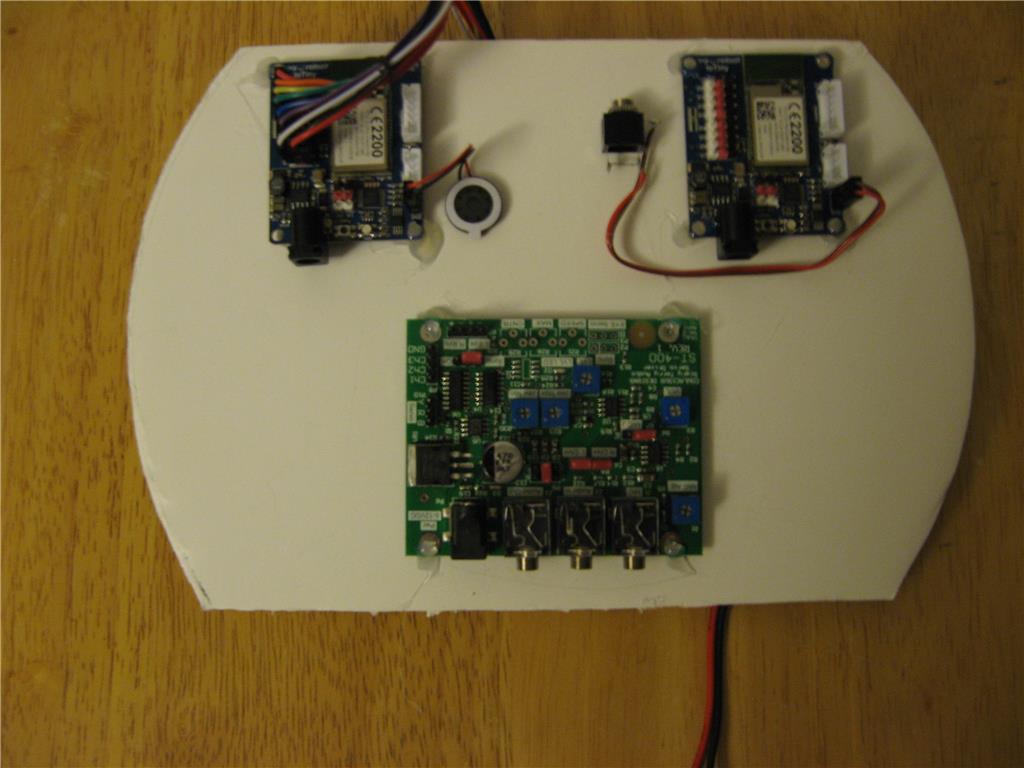
I have had good luck with the Scary Terry boards in the past. Very simple to use. I have heard the EZ Robot talk servo needs a lot of tuning to operate correctly. The board is installed and working so I want to use it. My only issue is not wanting to run an extra wire to the base for the power to run it. @ptp has given me suggestions but I really want to go back to a simple set regulator. Looking through some notes, I found information on a LM7908 regulator. I may try getting one and build it. I just need a schematic. If it works I should be all set.
@Andy Roid
I think you heard wrong. I have had awesome results using talk servo and so has Bob Houston I believe.... You should try it. Maybe save money from not having to buy extra hardware...The talk servo has come a long way. It was not great about a year or so ago. It has been improved upon greatly. I have heard no complaints about it over the past year or so.
I am not too picky about perfect timing, but I also had the feeling that the talk servo works quiet well...using it would also eliminate the need to find a propper voltage regulator since it runs straight out of the EZ-B, maybe you should give it a try?
I was also wondering why you prefere the Latte Panda over the Rasberry Pi...I had an eye on the Panda too, but was tending towards the Pi since it has a way bigger community, which makes digging for solutions much easier once you run into problems I guess?
The pi won't run windows 10 full version so ARC won't run. The Latte Panda will run Windows 10 (full version). The Technology Today show will be doing a review of the Latte Panda before long thanks to @Andy Roid.
I guess with so many praises I will try the talk servo. I need to cut out the converter so if the talk servo works as well as everyone is saying I will cut out the Scary Terry board too.
Thanks to all..
Ahhhh....very interesting! Looking forward to more on the Panda!
Sweeeeet!
Is a release of ARC for Windows IOT planned or is it not scheduled yet?